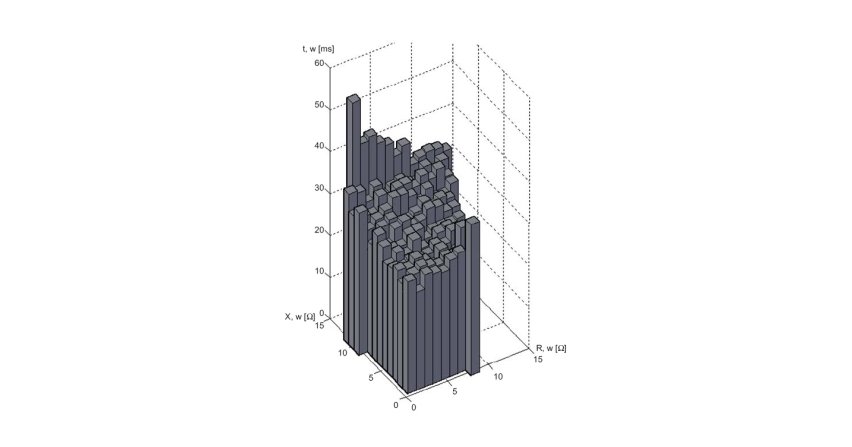
Działanie zabezpieczeń nadprądowych w stanach nieustalonych towarzyszących włączaniu nieobciążonych transformatorów SN (część 2.)
Włączeniu transformatora do systemu elektroenergetycznego (SEE) towarzyszy stan nieustalony prądu zasilającego. Zjawisko to ma charakter losowy, ponieważ jest zdeterminowane wieloma czynnikami. Zależy...
Włączeniu transformatora do systemu elektroenergetycznego (SEE) towarzyszy stan nieustalony prądu zasilającego. Zjawisko to ma charakter losowy, ponieważ jest zdeterminowane wieloma czynnikami. Zależy m.in. od cech konstrukcyjnych i parametrów technicznych transformatora i kąta fazowego napięcia zasilającego w chwili włączenia transformatora. Wybrane zagadnienia związane z udarami prądu magnesującego oraz ich wpływem na prawidłowość działania zabezpieczeń nadprądowych transformatorów SN omówione...
Technologie przesyłania danych w systemach automatyki przemysłowej
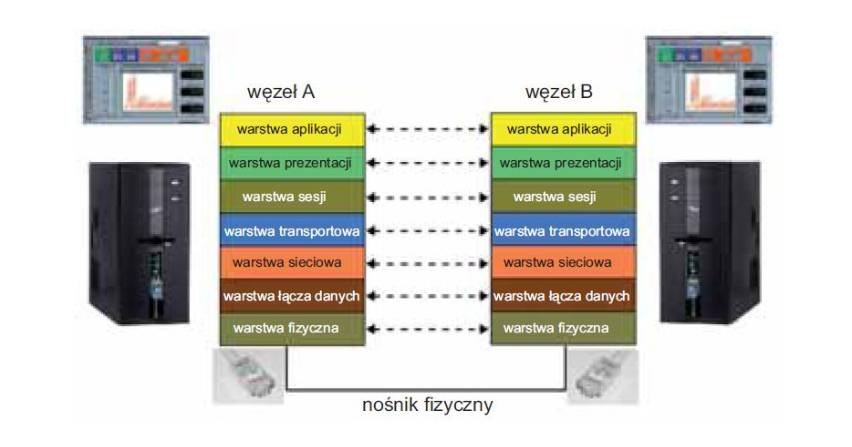
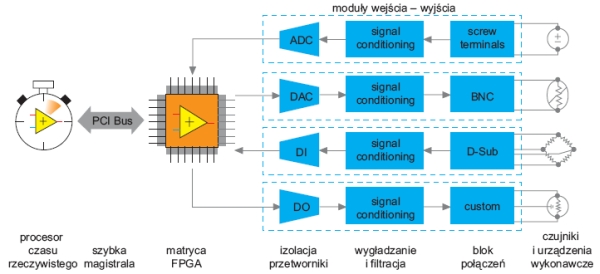
Aplikacje przemysłowe są jednymi z najbardziej zaawansowanych i wymagających, zarówno, jeśli chodzi o wykorzystywany sprzęt, jak i metody komunikacji pomiędzy modułami wykonawczymi. Ze względu na fundamentalne...
Aplikacje przemysłowe są jednymi z najbardziej zaawansowanych i wymagających, zarówno, jeśli chodzi o wykorzystywany sprzęt, jak i metody komunikacji pomiędzy modułami wykonawczymi. Ze względu na fundamentalne znaczenie dla gospodarki oraz społeczeństwa, systemy wykorzystywane w przemyśle (cukrownictwo, petrochemia, hutnictwo itp.) muszą być projektowane ze szczególną precyzją. Ich działanie musi być również niezawodne, co sprzyja rozwijaniu metod monitorowania i diagnostyki. Pojawienie się...
Podstawy sterowania logicznego

W większości opracowań tematyka związana z syntezą układów logicznych jest przedstawiana przede wszystkim w formie zagadnień związanych z projektowaniem i optymalizacją budowy układów cyfrowych. Stosunkowo...
W większości opracowań tematyka związana z syntezą układów logicznych jest przedstawiana przede wszystkim w formie zagadnień związanych z projektowaniem i optymalizacją budowy układów cyfrowych. Stosunkowo mały nacisk kładzie się na fakt wykorzystania tych zagadnień w projektowaniu oprogramowania dla układów sterownikowych. Podczas tworzenia programu, który później zostanie załadowany do sterownika, należy zwrócić uwagę, aby tworzony algorytm sterowania był najbardziej optymalny. W tym kontekście...
Zasady doboru aparatury pomiarowej dla układów elektroenergetycznej automatyki zabezpieczeniowej jednostek wytwórczych
Przekładniki prądowe i napięciowe wchodzą w skład elementów wejściowych struktury układu automatyki zabezpieczeniowej. Służą do zbierania i wstępnego przetwarzania wielkości fizycznych, charakteryzujących...
Przekładniki prądowe i napięciowe wchodzą w skład elementów wejściowych struktury układu automatyki zabezpieczeniowej. Służą do zbierania i wstępnego przetwarzania wielkości fizycznych, charakteryzujących stan pracy obiektu chronionego, na znormalizowane wartości wtórne, odpowiednie do zasilania dalszych układów, proporcjonalne do wielkości pierwotnych, zgodnie ze zdefiniowanym współczynnikiem transformacji – przekładnią.
Konfiguracja przemysłowych sieci sterowników PLC za pomocą pakietu CX-ONE
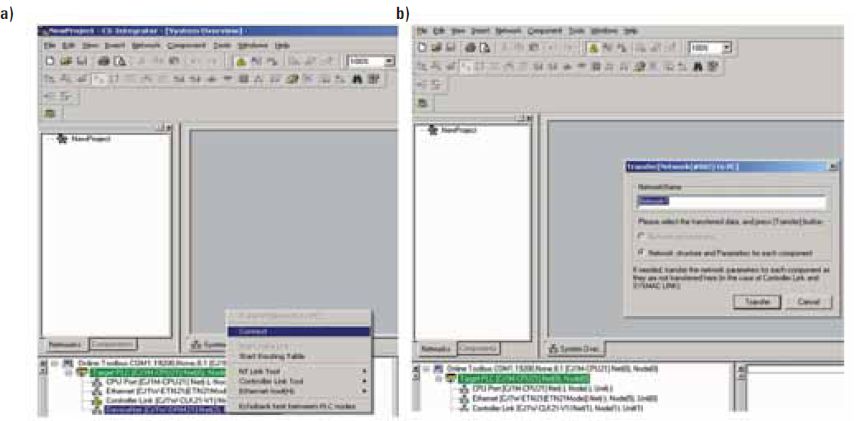
Na rynku znajduje się wielu producentów oferujących modułowe sterowniki PLC. Różnią się one liczbą dostępnych funkcji oraz językiem programowania stosowanym do konfiguracji urządzenia. Zastosowanie...
Na rynku znajduje się wielu producentów oferujących modułowe sterowniki PLC. Różnią się one liczbą dostępnych funkcji oraz językiem programowania stosowanym do konfiguracji urządzenia. Zastosowanie dedykowanej aplikacji pozwala użytkownikowi na swobodny dostęp do modułów połączonych w sieci przemysłowej za pomocą jednego interfejsu komunikacyjnego. Przyczynia się to do uproszczenia programowania oraz umożliwia zdalny dostęp i serwis urządzenia.
Poprawność decyzji podejmowanych przez zabezpieczenia odległościowe linii WN
Zabezpieczenie odległościowe to element elektroenergetycznej automatyki zabezpieczeniowej (EAZ), który służy m.in. do ochrony linii WN przed skutkami zwarć wielkoprądowych. Algorytm decyzyjny tego zabezpieczenia...
Zabezpieczenie odległościowe to element elektroenergetycznej automatyki zabezpieczeniowej (EAZ), który służy m.in. do ochrony linii WN przed skutkami zwarć wielkoprądowych. Algorytm decyzyjny tego zabezpieczenia bazuje na kryterium podimpedancyjnym. Zasada działania polega na wyznaczaniu parametrów wektora impedancji na podstawie sygnałów napięciowych i prądowych.
Struktura, funkcjonalność i zastosowania systemów wbudowanych
Różnorodność urządzeń oraz systemów związanych z działalnością człowieka rośnie znacząco wraz z rozwojem techniki i nauki. Techniki mikroprocesorowe stosowane są praktycznie wszędzie i nie stanowią już...
Różnorodność urządzeń oraz systemów związanych z działalnością człowieka rośnie znacząco wraz z rozwojem techniki i nauki. Techniki mikroprocesorowe stosowane są praktycznie wszędzie i nie stanowią już tylko uniwersalnych maszyn obliczeniowych, lecz wykorzystywane są w modułach sterujących pracą praktycznie wszystkich systemów wykorzystywanych w przemyśle oraz w życiu codziennym.
Funkcjonalny odpowiednik przekaźnika typu N

Urządzenia przekaźnikowe stanowią jedną z najszerszych grup urządzeń elektrycznych stosowanych na kolei. Przekaźniki wykorzystywane są w układach sterowania, sygnalizacji i zabezpieczeń. Przekaźniki prądu...
Urządzenia przekaźnikowe stanowią jedną z najszerszych grup urządzeń elektrycznych stosowanych na kolei. Przekaźniki wykorzystywane są w układach sterowania, sygnalizacji i zabezpieczeń. Przekaźniki prądu stałego najczęściej są urządzeniami elektromagnetycznymi.
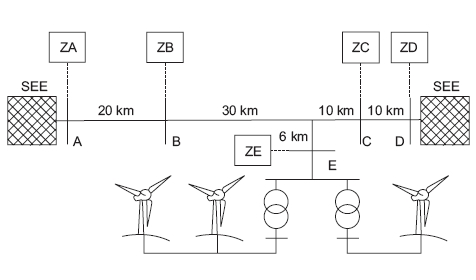
Funkcjonowanie elektroenergetycznej automatyki zabezpieczeniowej sieci WN przy niewielkiej wartości prądu zwarciowego generowanego przez farmę wiatrową
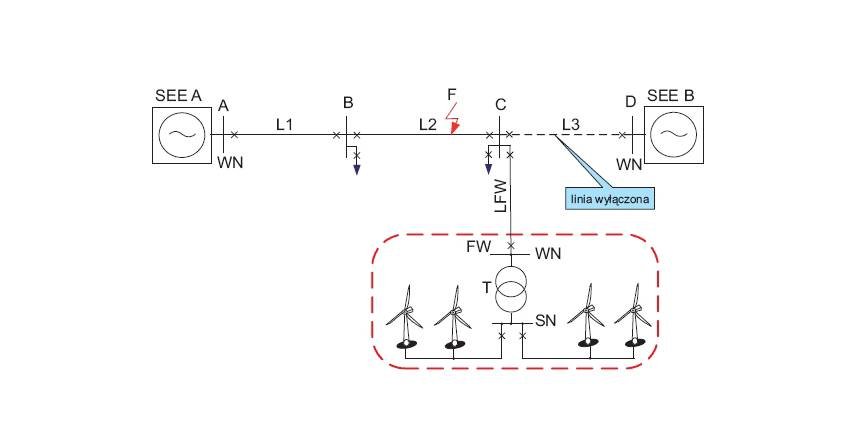
Prawidłowe funkcjonowanie elektroenergetycznej automatyki zabezpieczeniowej sieci WN w wielu przypadkach warunkowane jest odpowiednio dużą wartością prądu zwarciowego. Niewielka wartość prądu zwarciowego...
Prawidłowe funkcjonowanie elektroenergetycznej automatyki zabezpieczeniowej sieci WN w wielu przypadkach warunkowane jest odpowiednio dużą wartością prądu zwarciowego. Niewielka wartość prądu zwarciowego generowanego przez farmę wiatrową w niektórych stanach pracy sieci WN może być przyczyną problemów związanych z prawidłową identyfikacją i lokalizacją zakłóceń zwarciowych. Niewłaściwe działanie elektroenergetycznej automatyki zabezpieczeniowej w takich układach pracy może generować zagrożenie zarówno...
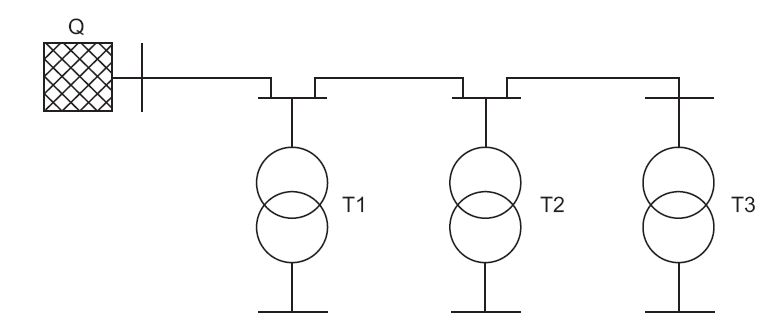
Nowatorski układ automatyki SZR w rozdzielnicach średnich napięć

Nowatorski układ automatyki SZR ma zastosowanie w rozdzielnicach SN w izolacji napowietrznej średniego napięcia. Rozwiązanie zostanie pokazane na przykładzie trójpolowej rozdzielnicy typu RSL 24 kV (2...
Nowatorski układ automatyki SZR ma zastosowanie w rozdzielnicach SN w izolacji napowietrznej średniego napięcia. Rozwiązanie zostanie pokazane na przykładzie trójpolowej rozdzielnicy typu RSL 24 kV (2 pola liniowe i pole transformatorowo-pomiarowe) w wykonaniu łukoochronnym. Pola liniowe wyposażone są w rozłączniki OM(B)-24/T/P/UD/160/R z napędami silnikowymi NSW30. Pole transformatorowe wyposażone jest w rozłącznik OMB-24/T/P/BDT/160 z napędem ręcznym typu NRK.
Podtrzymanie zasilania w układach elektronicznych na przykładzie zabezpieczeń energetycznych
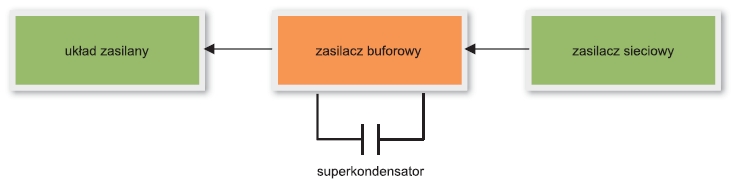
W systemach elektronicznych często zachodzi potrzeba zapewnienia pracy urządzenia przez określony czas po zaniku napięcia zasilania. Związane jest to z koniecznością realizacji szeregu funkcji przygotowujących...
W systemach elektronicznych często zachodzi potrzeba zapewnienia pracy urządzenia przez określony czas po zaniku napięcia zasilania. Związane jest to z koniecznością realizacji szeregu funkcji przygotowujących system do wyłączenia oraz sygnalizacją tego stanu do zewnętrznych systemów. Istnieje również konieczność przesłania informacji diagnostycznych o monitorowanym systemie do systemu nadrzędnego.
Układy łagodnego rozruchu (softstarty) – dobór i zastosowanie

Silnik elektryczny asynchroniczny charakteryzuje się dużą wartością prądu występującego przy jego rozruchu. Prąd ten powoduje dodatkowy spadek napięcia, który musi być uwzględniony na etapie projektowania...
Silnik elektryczny asynchroniczny charakteryzuje się dużą wartością prądu występującego przy jego rozruchu. Prąd ten powoduje dodatkowy spadek napięcia, który musi być uwzględniony na etapie projektowania całej instalacji. Udarowi prądu silnika towarzyszy również udar momentu, wywołujący niekorzystne stany mechaniczne narażające sterowane urządzenie na uszkodzenie. Zastosowanie układu rozruchowego na podstawie softstartu pozwala ograniczyć udar prądu i momentu. Odbywa się to poprzez stopniowe zwiększanie...
Zabezpieczenia odległościowe i ich testowanie
Dynamiczny rozwój techniki cyfrowej spowodował szerokie jej zastosowanie w elektroenergetyce. Liczne zalety sprawiły, że dotychczas stosowane rozwiązania elektromechaniczne i elektroniczne analogowe zabezpieczeń...
Dynamiczny rozwój techniki cyfrowej spowodował szerokie jej zastosowanie w elektroenergetyce. Liczne zalety sprawiły, że dotychczas stosowane rozwiązania elektromechaniczne i elektroniczne analogowe zabezpieczeń zostały w większości zastąpione rozwiązaniami cyfrowymi. Zastosowanie mikroprocesorów i rozwój oprogramowania umożliwiły koncentrację wielu funkcji zabezpieczeniowych w ramach jednego urządzenia, nazywanego cyfrowym zespołem automatyki zabezpieczeniowej.
Charakterystyka i zastosowania układów wykonawczych w systemach automatyki
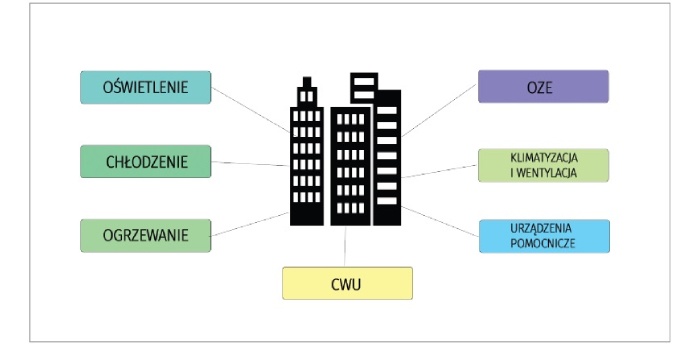
Układy automatyki są obecnie jednymi z najintensywniej rozwijanych systemów elektroniki i elektrotechniki. Ułatwiają one pracę zarówno instalacji przemysłowych, takich jak elektrownie, cukrownie, czy fabryki...
Układy automatyki są obecnie jednymi z najintensywniej rozwijanych systemów elektroniki i elektrotechniki. Ułatwiają one pracę zarówno instalacji przemysłowych, takich jak elektrownie, cukrownie, czy fabryki odzieży, jak i budynków komercyjnych, m.in. biurowców czy centrów handlowych. Pomimo że ogólna idea takiego systemu pozostaje niezmienna od kilkudziesięciu lat, wprowadzenie układów mikroprocesorowych oraz zaawansowanych technologii czujników i elementów wykonawczych pozwoliło znacząco rozszerzyć...
Układy SZR

Układy samoczynnego załączania rezerwy (SZR) pozwalają na automatyczne załączanie odbiorników do toru rezerwowego w przypadku zaniku napięcia w torze zasilania podstawowego. Po powrocie napięcia w torze...
Układy samoczynnego załączania rezerwy (SZR) pozwalają na automatyczne załączanie odbiorników do toru rezerwowego w przypadku zaniku napięcia w torze zasilania podstawowego. Po powrocie napięcia w torze zasilania podstawowego następuje automatyczny powrót układu zasilania do stanu pierwotnego. Układy SZR są najczęściej stosowane w obiektach, w których wymagana jest ciągłość zasilania, na przykład w szpitalach, bankach czy budynkach użyteczności publicznej. Szpital jest obiektem, w którym nawet krótka...
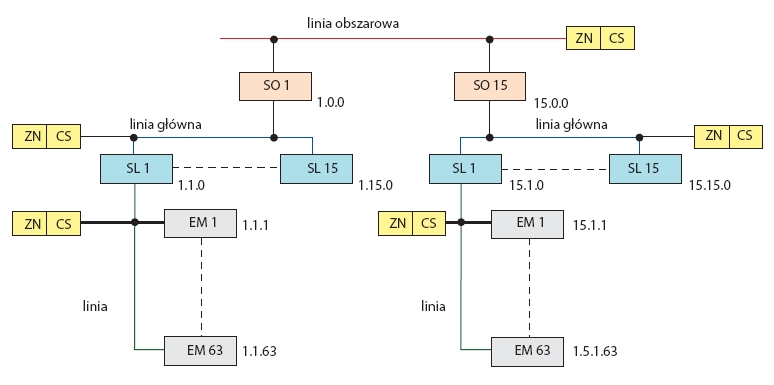
Media transmisyjne stosowane w systemie sterowania KNX
W inteligentnych budynkach występują różne instalacje i systemy sterowania. Systemy te zwykle dotyczą takich obszarów zastosowań, jak: bezpieczeństwo, komfort klimatyczny, zarządzanie energią oraz automatyzacja...
W inteligentnych budynkach występują różne instalacje i systemy sterowania. Systemy te zwykle dotyczą takich obszarów zastosowań, jak: bezpieczeństwo, komfort klimatyczny, zarządzanie energią oraz automatyzacja miejsc pracy. Szczególne znaczenie w systemach automatyki budynkowej mają tzw. otwarte systemy sterowania, do których należy m.in. system KNX. System ten, wykorzystujący logikę sterowania rozproszonego, stosowany jest głównie w obiektach mieszkalnych oraz w obiektach użyteczności publicznej.
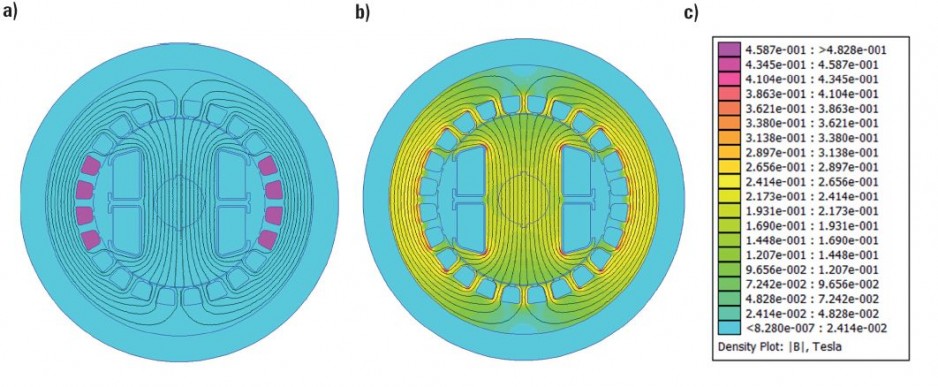
Odwzorowanie indukcyjności wzajemnych w modelu obwodowym maszyny synchronicznej jawnobiegunowej
W równaniach strumieniowo-napięciowych opisujących model matematyczny maszyny synchronicznej jawnobiegunowej w układzie osi naturalnych związanych ze stojanem oraz z wirnikiem (bez obwodów tłumiących)...
W równaniach strumieniowo-napięciowych opisujących model matematyczny maszyny synchronicznej jawnobiegunowej w układzie osi naturalnych związanych ze stojanem oraz z wirnikiem (bez obwodów tłumiących) z uwzględnieniem elektrycznego kąta położenia wirnika ϑ występują rozkłady:
indukcyjności własnych uzwojeń pasmowych stojana La, Lb, Lc oraz uzwojenia wzbudzenia Lf,
indukcyjności wzajemnych uzwojeń pasmowych stojana Lab, Lbc, Lca, Lba, Lcb, Lac.
indukcyjności wzajemnych uzwojeń pasmowych stojana...
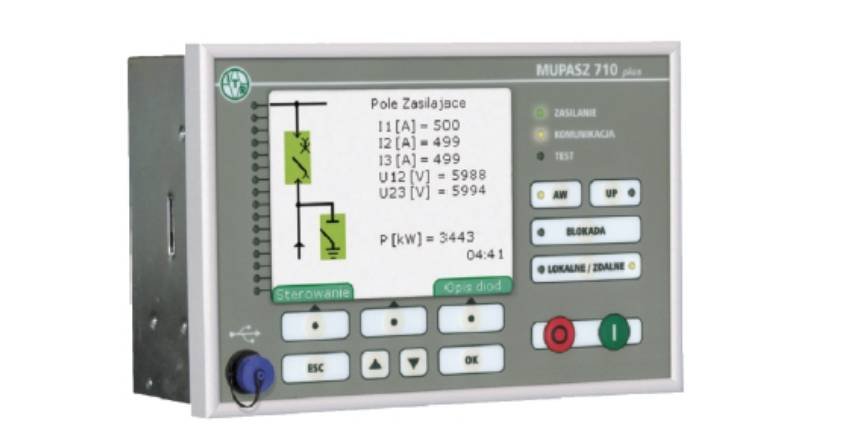
Implementacja magistrali CANBUS oraz protokołu transmisji PPM2 na przykładzie sterownika polowego MUPASZ 710plus

Interfejs CAN powstał na potrzeby przemysłu motoryzacyjnego, ale ze względu na swoje zalety, takie jak odporność na błędy transmisji i wprowadzony standard, znalazł zastosowanie również w innych gałęziach...
Interfejs CAN powstał na potrzeby przemysłu motoryzacyjnego, ale ze względu na swoje zalety, takie jak odporność na błędy transmisji i wprowadzony standard, znalazł zastosowanie również w innych gałęziach przemysłu. Jego szczególnie intensywny rozwój nastąpił w dziedzinie szeroko pojętej automatyki, w tym w obszarze inteligentnych czujników, uniwersalnych modułów sterowania oraz w napędach.
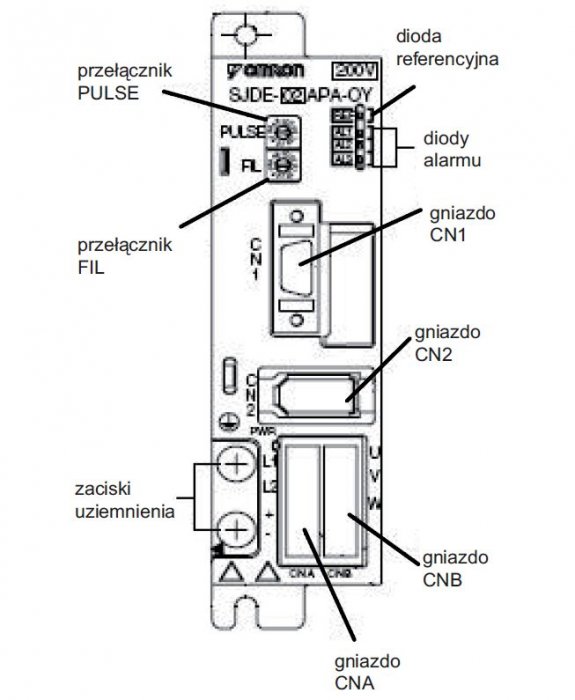
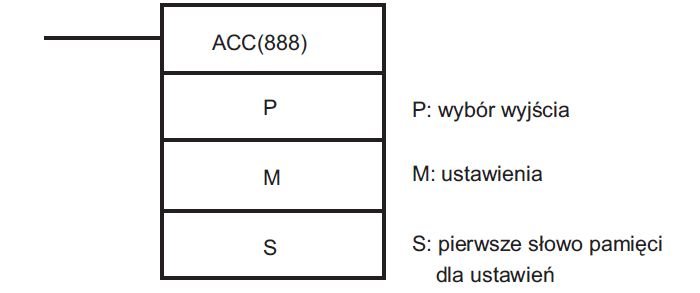
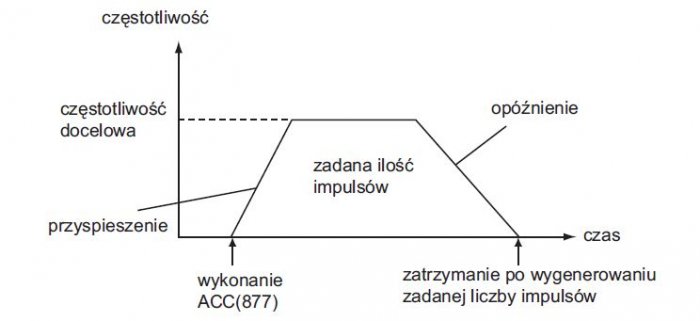
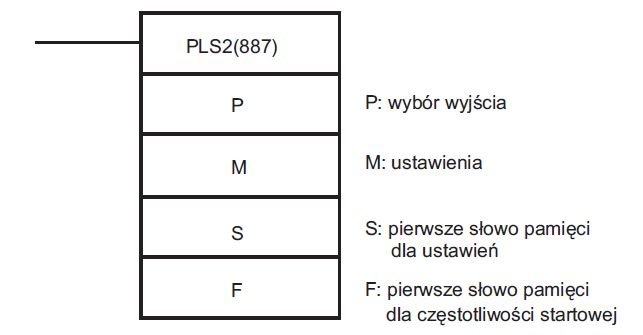
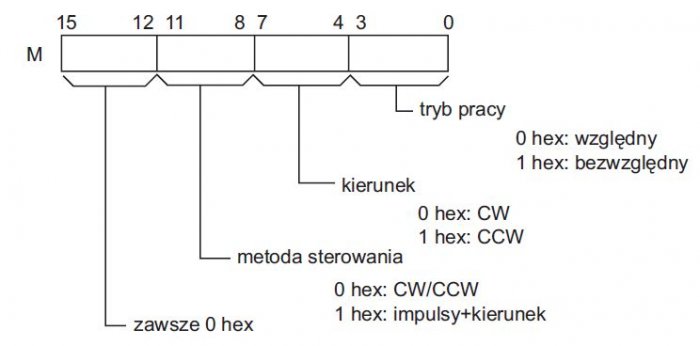
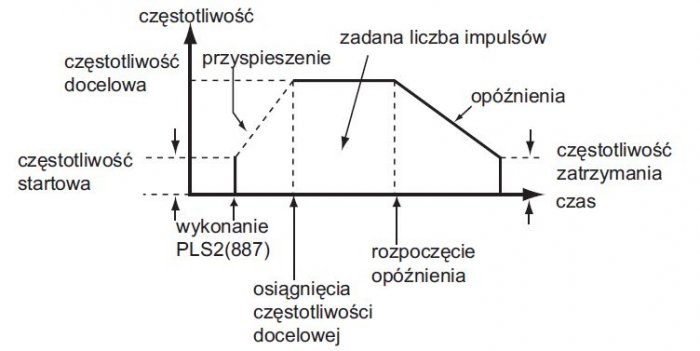
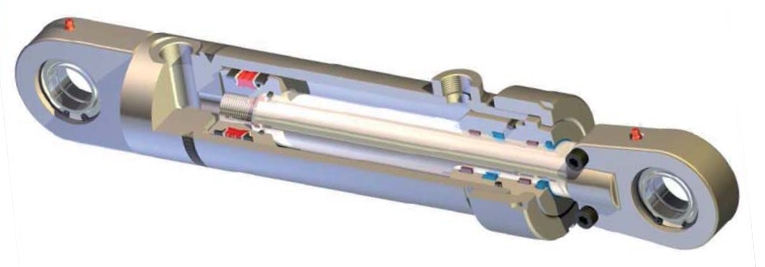
Precyzyjne pomiary przesunięcia i kąta obrotu – wprowadzenie
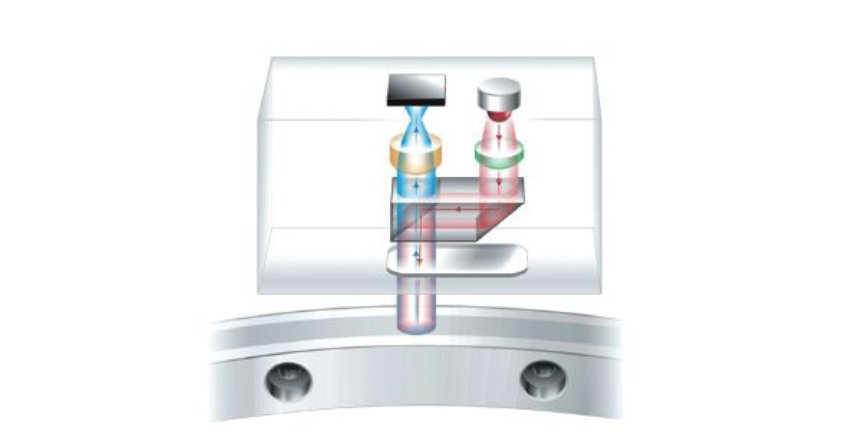
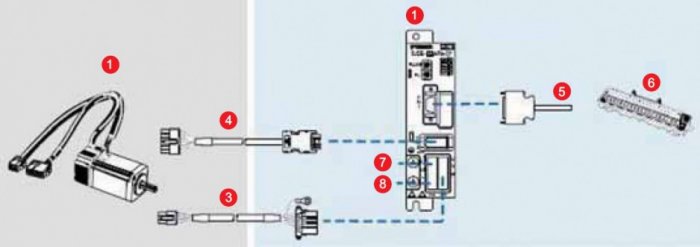
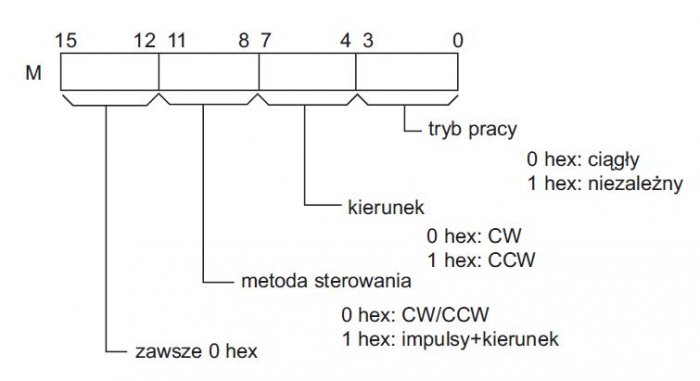
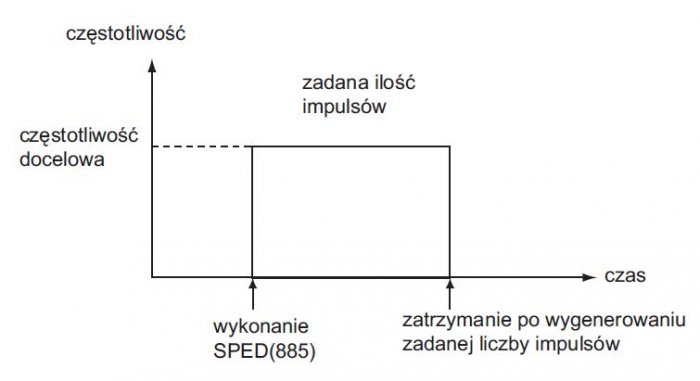
Urządzenia wykonawcze są stosowane w zwykłych zadaniach, gdzie jeden napęd realizuje pojedynczy ruch, jak również w zaawansowanych systemach, gdzie wiele urządzeń wykonawczych wykonuje skoordynowane i...
Urządzenia wykonawcze są stosowane w zwykłych zadaniach, gdzie jeden napęd realizuje pojedynczy ruch, jak również w zaawansowanych systemach, gdzie wiele urządzeń wykonawczych wykonuje skoordynowane i kontrolowane przemieszczenia (np. roboty przemysłowe). Proste zadania są łatwo realizowane i zwykle wymagają nieskomplikowanych rozwiązań do kontroli położenia urządzenia wykonawczego. Występują jednak bardziej złożone systemy zintegrowane, które realizują złożone zadania wymagające kontroli przemieszczeń...
Sterowniki polowe SN/nn z zaimplementowanym edytorem funkcji logicznych ELF
Instytut Tele- i Radiotechniczny od początku lat 90. prowadzi prace nad rozwojem cyfrowej techniki zabezpieczeniowej. Ich owocem było opracowanie i wdrożenie pierwszego polskiego mikroprocesorowego sterownika...
Instytut Tele- i Radiotechniczny od początku lat 90. prowadzi prace nad rozwojem cyfrowej techniki zabezpieczeniowej. Ich owocem było opracowanie i wdrożenie pierwszego polskiego mikroprocesorowego sterownika polowego SN. Od tego wydarzenia mija 20 lat. Obecnie na rynku znajduje się już szósta generacja sterownika o nazwie handlowej MUPASZ 710plus. Popularność na rynku krajowym, jak i na rynkach zagranicznych, zdobył on niezawodnością, ergonomią obsługi, intuicyjnym interfejsem użytkownika oraz spełniając...
Programowalne sterowniki – wprowadzenie
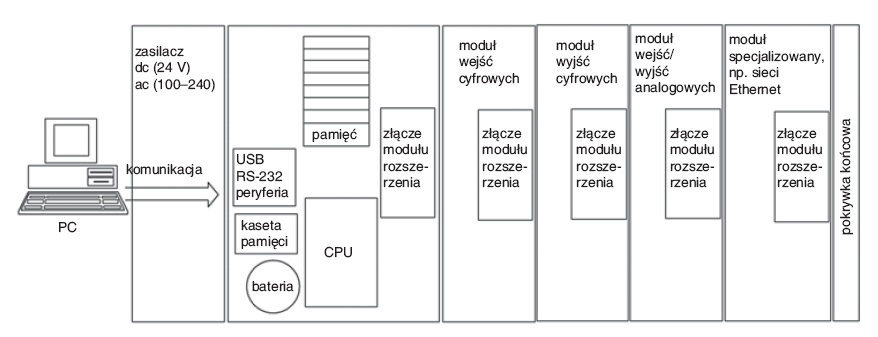
Względy praktyczne wymuszają, aby systemy kontrolno-pomiarowe były proste oraz działały w określanych warunkach pracy. Z tego powodu obok dokładności systemu, istotne są również możliwości sprzętu pomiarowego...
Względy praktyczne wymuszają, aby systemy kontrolno-pomiarowe były proste oraz działały w określanych warunkach pracy. Z tego powodu obok dokładności systemu, istotne są również możliwości sprzętu pomiarowego oraz sterującego wybranym obiektem. Dostępne na rynku modułowe i kompaktowe sterowniki PLC posiadają duży wybór dodatkowych modułów cyfrowych (tzw. modułów rozszerzeń), takich jak: wejść i wyjść cyfowych, specjalnych wejść, w których sygnałem wejściowym jest napięcie przemienne ac lub ac/dc,...
Zasilacze impulsowe dla układów automatyki przemysłowej
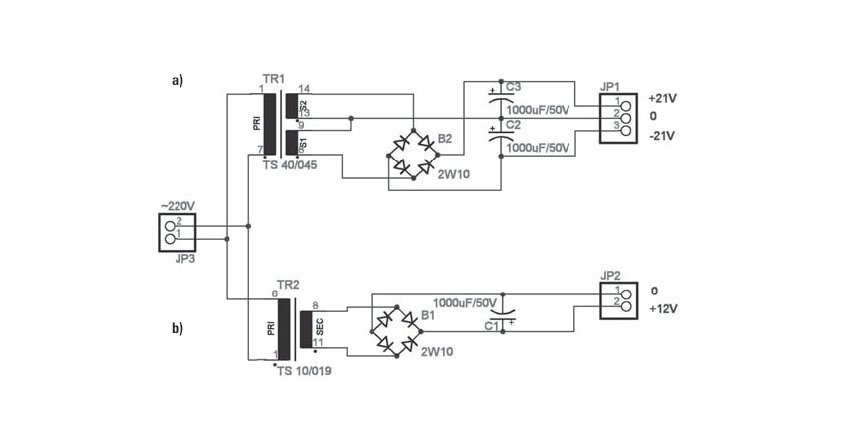
Omawiając temat zasilaczy stosowanych w automatyce autor opisuje zasilacze impulsowe. Zwraca przy tym uwagę uwagę na ich szczegół funkcjonowania dotyczący napięcia przemiennego generowanego z transformatora...
Omawiając temat zasilaczy stosowanych w automatyce autor opisuje zasilacze impulsowe. Zwraca przy tym uwagę uwagę na ich szczegół funkcjonowania dotyczący napięcia przemiennego generowanego z transformatora i przetwarzanego na napięcie stałe za pomocą układu prostownika. Na tej podstawie opisuje typy prostowników: prostowniki jednopołówkowe i prostowniki dwupołówkowe. W dalszej części opisem objął zasilacze impulsowe i przetwornice.
Mobilne sposoby sterowania w inteligentnym budynku

W artykule o tym, że automatyka budynkowa i systemy magistralne do sterowania instalacjami i wyposażeniem technicznym budynku optymalizują procesy zarządzania oraz umożliwiają zdalne sterowanie za pośrednictwem...
W artykule o tym, że automatyka budynkowa i systemy magistralne do sterowania instalacjami i wyposażeniem technicznym budynku optymalizują procesy zarządzania oraz umożliwiają zdalne sterowanie za pośrednictwem Internetu. Inteligentny budynek, dzięki systemom KNX czy eNet powiadamiającym o stanach zagrożenia oraz dzięki wizualizacji przyspieszającym przekazywanie informacji, jest łatwiejszy w administrowaniu.
Technologia RFID w systemach automatycznej identyfikacji obiektów

W artykule opisana została automatyczna identyfikacja obiektów (przedmiotów, ludzi, zwierząt) znajdujących się w ruchu lub ukrytych wykorzystującą technologię RFID, która znajduje szczególne zastosowanie...
W artykule opisana została automatyczna identyfikacja obiektów (przedmiotów, ludzi, zwierząt) znajdujących się w ruchu lub ukrytych wykorzystującą technologię RFID, która znajduje szczególne zastosowanie w obszarach, w których istotne jest skrócenie czasu identyfikacji wielu obiektów jednocześnie, w warunkach trudnych i niedostępnych. Autor opisuje konkretne zastosowania tej technologii. Podaje przykłady jak etykiety tagowane w systemach RFID mocowane do określonych przedmiotów mogą przyczyniać się...
Najnowsze produkty i technologie
Firma eMKa zaprasza na szkolenia zawodowe

Firma eMKa Szkolenia to dostawca usług edukacyjnych z 19-letnim doświadczeniem. Specjalizujemy się w podnoszeniu kwalifikacji zawodowych osób dorosłych i współpracujemy w sektorze B2B (fabryki, korporacje,...
Firma eMKa Szkolenia to dostawca usług edukacyjnych z 19-letnim doświadczeniem. Specjalizujemy się w podnoszeniu kwalifikacji zawodowych osób dorosłych i współpracujemy w sektorze B2B (fabryki, korporacje, sieci wielkopowierzchniowe etc. ), jednak zaopiekujemy się każdym klientem – nawet tym najmniejszym.
Energoelektroniczne kompensatory mocy biernej ASTec SVG dużej mocy

Rosnące wymagania dotyczące jakości energii elektrycznej oraz dynamiczna zmienność obciążeń w zakładach przemysłowych czynią kompensację mocy biernej kluczową z perspektywy technicznej i ekonomicznej....
Rosnące wymagania dotyczące jakości energii elektrycznej oraz dynamiczna zmienność obciążeń w zakładach przemysłowych czynią kompensację mocy biernej kluczową z perspektywy technicznej i ekonomicznej. W obliczu wzrastających kosztów energii biernej oraz konieczności spełnienia rygorystycznych norm, coraz większą rolę odgrywają nowoczesne rozwiązania, takie jak statyczne generatory mocy biernej (SVG) o prądzie znamionowym 150 A i 200 A. Dzięki zaawansowanym parametrom, możliwościom rozbudowy i dynamicznej...
Stabilizacja napięcia w układach zasilania obiektów krytycznych – rozwiązania MSR i MST

Wahania napięcia w sieciach elektrycznych to powszechny problem, który może prowadzić do awarii urządzeń czy przerw w produkcji. Według normy PN-EN 50160, dopuszczalne odchylenia napięcia to ±10%, jednak...
Wahania napięcia w sieciach elektrycznych to powszechny problem, który może prowadzić do awarii urządzeń czy przerw w produkcji. Według normy PN-EN 50160, dopuszczalne odchylenia napięcia to ±10%, jednak wiele urządzeń przemysłowych wymaga znacznie wyższej stabilności.
Licznik na szynę TH35 (DIN) – REMIZ 3

W dobie rosnących kosztów energii i zaostrzających się norm efektywności energetycznej, precyzyjna analityka staje się fundamentem nowoczesnego zarządzania infrastrukturą. REMIZ 3 to licznik energii elektrycznej,...
W dobie rosnących kosztów energii i zaostrzających się norm efektywności energetycznej, precyzyjna analityka staje się fundamentem nowoczesnego zarządzania infrastrukturą. REMIZ 3 to licznik energii elektrycznej, który łączy kompaktową budowę na szynie DIN z funkcjonalnością zaawansowanych jednostek pomiarowych ze zdalnym odczytem.
Czym jest asessment center?
Asessment center to coraz popularniejsza metoda oceny kompetencji zawodowych kandydatów, stosowana szczególnie podczas rekrutacji na stanowiska kierownicze. Sprawdź, co warto o niej wiedzieć!
Asessment center to coraz popularniejsza metoda oceny kompetencji zawodowych kandydatów, stosowana szczególnie podczas rekrutacji na stanowiska kierownicze. Sprawdź, co warto o niej wiedzieć!
Miej oko na swój dom – poznaj smart kamery Sonoff

Co dzieje się w domu, kiedy jesteś w pracy, na wakacjach lub na spotkaniu? Czy wszystko jest w porządku z dzieckiem, które zostało pod opieką dziadków? Czy pies spokojnie odpoczywa, a kurier rzeczywiście...
Co dzieje się w domu, kiedy jesteś w pracy, na wakacjach lub na spotkaniu? Czy wszystko jest w porządku z dzieckiem, które zostało pod opieką dziadków? Czy pies spokojnie odpoczywa, a kurier rzeczywiście zostawił paczkę pod drzwiami? Nowoczesne kamery WiFi pozwalają sprawdzić to w każdej chwili – bez skomplikowanej instalacji i wysokich kosztów. Poznaj smart kamery Sonoff i wybierz model najlepiej dopasowany do swoich potrzeb!
2027: koniec z licznikami bez zdalnego odczytu. Dyrektywa EED redefiniuje podejście do zarządzania budynkami

Dyrektywa o efektywności energetycznej (EED) nakłada na państwa członkowskie UE obowiązek wyposażenia wszystkich liczników ciepła, chłodzenia i ciepłej wody użytkowej w funkcję zdalnego odczytu. Zostało...
Dyrektywa o efektywności energetycznej (EED) nakłada na państwa członkowskie UE obowiązek wyposażenia wszystkich liczników ciepła, chłodzenia i ciepłej wody użytkowej w funkcję zdalnego odczytu. Zostało już tylko 6 miesięcy na wymianę lub modernizację urządzeń, które nie spełniają tych wymagań. W Polsce oznacza to wymianę milionów liczników, a za niedopełnienie obowiązku grożą kary do 10 000 zł – i nie jest to wyjątek w skali europejskiej: na koniec 2024 r. w krajach UE (wraz z Norwegią, Szwajcarią...
Techniki relaksacyjne, które pomogą ci radzić sobie ze stresem w pracy

Techniki relaksacyjne to doskonały sposób na walkę z nadmiernym stresem i odczuciem niepokoju. Jeśli więc twoja praca wywołuje u ciebie zdenerwowanie i ciągłe napięcie, musisz poznać popularne metody,...
Techniki relaksacyjne to doskonały sposób na walkę z nadmiernym stresem i odczuciem niepokoju. Jeśli więc twoja praca wywołuje u ciebie zdenerwowanie i ciągłe napięcie, musisz poznać popularne metody, które pomogą ci sobie z tym radzić.
BESS – bateryjne systemy magazynowania energii w praktyce biznesowej

Bateryjne systemy magazynowania energii BESS (Battery Energy Storage System) to technologia, która zmienia sposób zarządzania energią elektryczną w obiektach komercyjnych i przemysłowych. Magazyny energii...
Bateryjne systemy magazynowania energii BESS (Battery Energy Storage System) to technologia, która zmienia sposób zarządzania energią elektryczną w obiektach komercyjnych i przemysłowych. Magazyny energii pozwalają gromadzić nadwyżki energii z odnawialnych źródeł i wykorzystywać je w momentach zwiększonego zapotrzebowania – bez strat, bez przestojów, bez uzależnienia od sieci elektroenergetycznej.
W Polsce działa ponad 200 dużych instalacji BESS o łącznej mocy przekraczającej 1,2 GW. Do 2030 roku...
Innowacyjna infrastruktura, unikalny poligon szkoleniowy oraz bezpłatne szkolenia dla uczniów, dorosłych i nauczycieli zawodu

Dynamiczny rozwój sektora elektroenergetycznego oraz transformacja energetyczna stawiają przed rynkiem pracy bezprecedensowe wymagania. Tradycyjny system oświaty, choć daje solidne podstawy, często napotyka...
Dynamiczny rozwój sektora elektroenergetycznego oraz transformacja energetyczna stawiają przed rynkiem pracy bezprecedensowe wymagania. Tradycyjny system oświaty, choć daje solidne podstawy, często napotyka barierę w postaci szybkiego tempa zmian technologicznych. Odpowiedzią na tę lukę jest ogólnopolska sieć Branżowych Centrów Umiejętności (BCU). Wśród placówek wiodących prym w dziedzinie elektroenergetyki szczególne miejsce zajmuje Branżowe Centrum Umiejętności w Dziedzinie Energetyki w Nisku (woj....
Niezawodne wyłączniki nadprądowe (MCB) marki NOARK Electric
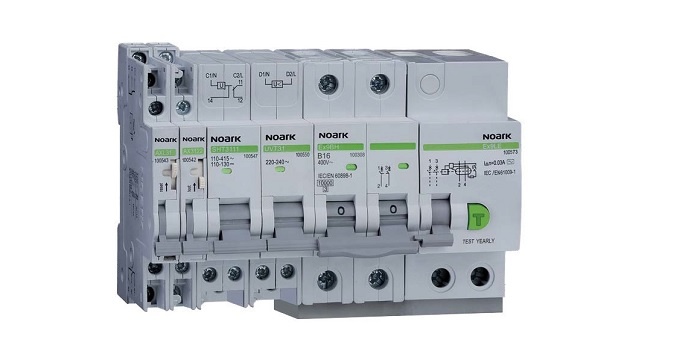
Wyłączniki nadprądowe zabezpieczają instalację przed skutkami przeciążeń i zwarć. Ich działanie opiera się na dwóch mechanizmach: członie termicznym (reagującym na przeciążenie) oraz elektromagnetycznym...
Wyłączniki nadprądowe zabezpieczają instalację przed skutkami przeciążeń i zwarć. Ich działanie opiera się na dwóch mechanizmach: członie termicznym (reagującym na przeciążenie) oraz elektromagnetycznym (reagującym na zwarcie). Skupimy się tutaj na seriach urządzeń zwarciowej zdolności łączeniowej 6 kA oraz 10 kA.
ERGOM – jakość gwarantowana

Branża elektroenergetyczna w Polsce – począwszy od wytwarzania, przez przesył i dystrybucję, po użytkowników końcowych – podlega obecnie dynamicznym zmianom, których motorem napędowym jest transformacja...
Branża elektroenergetyczna w Polsce – począwszy od wytwarzania, przez przesył i dystrybucję, po użytkowników końcowych – podlega obecnie dynamicznym zmianom, których motorem napędowym jest transformacja energetyczna. Zmiany te wymuszają na producentach osprzętu łączeniowego rozwiązania zapewniające gwarantowane i niezawodne połączenia poszczególnych elementów w tym systemie. ERGOM jako producent końcówek i łączników kablowych dostarcza rozwiązania, które spełniają powyższe kryteria.
Dlaczego kamery IP tracą obraz po uruchomieniu – najczęstsze błędy konfiguracyjne na etapie rozruchu

System zmontowany, kable zaciśnięte, rejestrator włączony – a na ekranie czarny obraz z części kamer. Scenariusz znany wielu instalatorom, szczególnie przy kompletacji systemu z podzespołów różnych producentów....
System zmontowany, kable zaciśnięte, rejestrator włączony – a na ekranie czarny obraz z części kamer. Scenariusz znany wielu instalatorom, szczególnie przy kompletacji systemu z podzespołów różnych producentów. Zanim zaczniesz szukać uszkodzeń sprzętowych, przejdź przez pięć punktów, które odpowiadają za większość problemów na pierwszym rozruchu.
Te stoiska warto odwiedzić podczas targów Battery Forum 2026! Sprawdź!

Od 19 do 21 maja trwają targi Battery Forum 2026. Tysiące instalatorów, przedstawicieli biznesu, rynku energii oraz samorządów spotykają się w Nadarzynie pod Warszawą, by rozmawiać o magazynach energii,...
Od 19 do 21 maja trwają targi Battery Forum 2026. Tysiące instalatorów, przedstawicieli biznesu, rynku energii oraz samorządów spotykają się w Nadarzynie pod Warszawą, by rozmawiać o magazynach energii, nowoczesnych technologiach i rozwiązaniach przyspieszających transformację energetyczną. To trzy dni pełne praktycznej wiedzy, premier technologicznych i dyskusji o wyzwaniach, z którymi mierzy się dziś branża OZE i energetyka. Które stoiska warto odwiedzić w tych dniach? Sprawdźcie!
Firma WIN SOURCE zaprezentowała się na Warsaw Industry Automatica 2026 i przedstawiła możliwości wsparcia łańcucha dostaw komponentów dla automatyki przemysłowej

14 maja 2026 r. Firma WIN SOURCE, globalny lider w dystrybucji komponentów elektronicznych, poinformowała, że z powodzeniem wzięła udział w targach Warsaw Industry Automatica 2026. Wydarzenie odbyło się...
14 maja 2026 r. Firma WIN SOURCE, globalny lider w dystrybucji komponentów elektronicznych, poinformowała, że z powodzeniem wzięła udział w targach Warsaw Industry Automatica 2026. Wydarzenie odbyło się w dniach 12–14 maja 2026 r. w Ptak Warsaw Expo w Polsce. Podczas targów WIN SOURCE prowadziła pogłębione rozmowy z klientami oraz specjalistami branżowymi z obszarów produkcji urządzeń, elektrotechniki, integracji systemów oraz zakupów na potrzeby utrzymania ruchu, prezentując swoje możliwości usługowe...
BradyPrinter i4311: przemysłowy druk etykiet bez przewodów
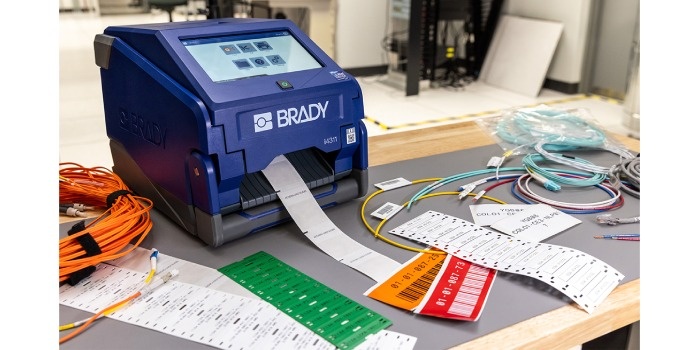
Pierwsza przenośna drukarka umożliwiająca tworzenie etykiet o szerokości 101,60 mm bez kabli i ograniczeń – drukuj wszystko, czego potrzebujesz, w dowolnym miejscu!
Pierwsza przenośna drukarka umożliwiająca tworzenie etykiet o szerokości 101,60 mm bez kabli i ograniczeń – drukuj wszystko, czego potrzebujesz, w dowolnym miejscu!
Klimatyzacja w mieszkaniu – o czym pamiętać przed montażem?

Letnie upały stają się w Polsce normą. Gdy temperatura w cieniu sięga 30°C, strumień zimnego powietrza przynosi upragnione wytchnienie. Pozwala skupić się na pracy lub zaznać prawdziwego relaksu. Odpowiednio...
Letnie upały stają się w Polsce normą. Gdy temperatura w cieniu sięga 30°C, strumień zimnego powietrza przynosi upragnione wytchnienie. Pozwala skupić się na pracy lub zaznać prawdziwego relaksu. Odpowiednio dobrany system klimatyzacji to jednak nie tylko chłodzenie. To narzędzie zapewniające pełną kontrolę nad mikroklimatem, wilgotnością i czystością powietrza w Twoim domu. Zanim zdecydujesz się na montaż, przeanalizuj kilka kluczowych aspektów. Dzięki temu Twoja inwestycja będzie efektywna, oszczędna...
Jak dobrać nawiewniki do charakterystyki domu energooszczędnego lub pasywnego?

Domy energooszczędne i pasywne wyróżniają się wyjątkowo szczelną konstrukcją, która pozwala ograniczyć straty ciepła do minimum. Nowoczesna stolarka okienna, wielowarstwowe ocieplenie i zaawansowane technologie...
Domy energooszczędne i pasywne wyróżniają się wyjątkowo szczelną konstrukcją, która pozwala ograniczyć straty ciepła do minimum. Nowoczesna stolarka okienna, wielowarstwowe ocieplenie i zaawansowane technologie izolacyjne sprawiają, że budynki te utrzymują stabilną temperaturę przez cały rok przy minimalnym zużyciu energii. Jednak ta sama szczelność, która zapewnia oszczędności, rodzi wyzwania w zakresie wentylacji – naturalna infiltracja powietrza jest zbyt niska, by utrzymać właściwy poziom tlenu,...
Analiza parametrów jakości energii elektrycznej z wykorzystaniem przenośnych analizatorów PQ-BOX 150

Jakość energii elektrycznej jest kluczowym czynnikiem zapewniającym niezawodne i efektywne funkcjonowanie systemów elektroenergetycznych, zarówno w przemyśle, jak i sieciach dystrybucyjnych. Współczesne...
Jakość energii elektrycznej jest kluczowym czynnikiem zapewniającym niezawodne i efektywne funkcjonowanie systemów elektroenergetycznych, zarówno w przemyśle, jak i sieciach dystrybucyjnych. Współczesne przenośne analizatory, takie jak PQ-BOX 150, PQ-BOX 200 oraz PQ-BOX 300 firmy A-Eberle, odgrywają istotną rolę w monitorowaniu i analizie parametrów jakości energii elektrycznej. Urządzenia te oferują zaawansowane możliwości pomiarowe oraz zgodność z międzynarodowymi standardami, co czyni je niezbędnymi...
Bezpieczeństwo pożarowe instalacji kablowych w budynkach

Kluczowym celem stosowania wymagań technicznych, klasyfikacji oraz zasad projektowania instalacji opartych na kablach ognioodpornych i bezhalogenowych jest zapewnienie odpowiedniego poziomu bezpieczeństwa...
Kluczowym celem stosowania wymagań technicznych, klasyfikacji oraz zasad projektowania instalacji opartych na kablach ognioodpornych i bezhalogenowych jest zapewnienie odpowiedniego poziomu bezpieczeństwa pożarowego obiektów budowlanych. Oznacza to ograniczenie rozprzestrzeniania się ognia i dymu, umożliwienie sprawnej ewakuacji oraz zagwarantowanie ciągłości pracy systemów odpowiedzialnych za bezpieczeństwo. Dlatego dobór kabli powinien uwzględniać zarówno ich zachowanie w warunkach pożaru, jak...
Wyzwania nowoczesnej energetyki: kable do instalacji OZE i magazynów energii

Dynamiczny rozwój odnawialnych źródeł energii (OZE) oraz technologii magazynowania energii elektrycznej wymaga od inżynierów i producentów coraz bardziej zaawansowanych rozwiązań. Aby cała instalacja działała...
Dynamiczny rozwój odnawialnych źródeł energii (OZE) oraz technologii magazynowania energii elektrycznej wymaga od inżynierów i producentów coraz bardziej zaawansowanych rozwiązań. Aby cała instalacja działała wydajnie i bezawaryjnie, niezbędne jest zastosowanie odpowiedniego okablowania, które zagwarantuje bezpieczny przesył energii – nawet w najbardziej wymagającym środowisku.
Można prościej: ograniczniki przepięć typu 1 z techniką ACI
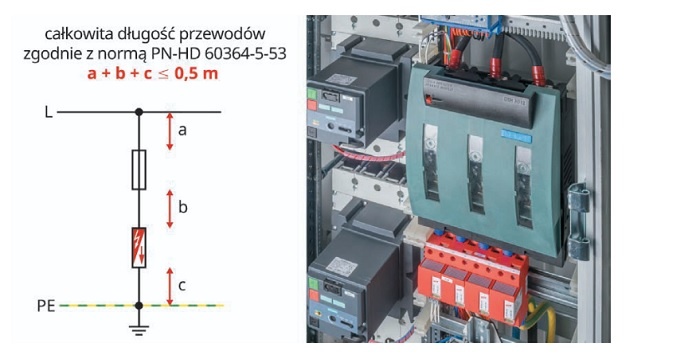
Ochrona przed przepięciami w instalacjach elektrycznych staje się kluczowym elementem dbałości nie tylko o mienie, ale przede wszystkim o bezpieczeństwo użytkowników. Norma PN-HD 60364-5-53:2022 [1] precyzyjnie...
Ochrona przed przepięciami w instalacjach elektrycznych staje się kluczowym elementem dbałości nie tylko o mienie, ale przede wszystkim o bezpieczeństwo użytkowników. Norma PN-HD 60364-5-53:2022 [1] precyzyjnie definiuje zasady doboru oraz montażu ograniczników przepięć (SPD, surge protective devices) w instalacjach niskiego napięcia.
Analiza parametrów jakości energii elektrycznej w kontekście wymagań norm IEC 61000-4-30 oraz PN-EN 50160

Jakość energii elektrycznej stanowi kluczowy element prawidłowego funkcjonowania współczesnych sieci elektroenergetycznych. Wymagania dotyczące parametrów jakości energii elektrycznej są precyzyjnie określone...
Jakość energii elektrycznej stanowi kluczowy element prawidłowego funkcjonowania współczesnych sieci elektroenergetycznych. Wymagania dotyczące parametrów jakości energii elektrycznej są precyzyjnie określone w normach IEC 61000-4-30 oraz PN-EN 50160. Obie normy – mimo że mają różne zakresy i cele – dobrze się uzupełniają i są kluczowe dla zapewnienia jakości energii elektrycznej w sieciach elektroenergetycznych.
BradyScan: najlepszy odczyt kodów kreskowych za pomocą telefonu – za darmo
Firma Brady Corporation, specjalizująca się w automatycznej identyfikacji i rejestracji danych, umożliwia użytkownikom profesjonalne odczytywanie i generowanie kodów kreskowych za pomocą smartfona – bez...
Firma Brady Corporation, specjalizująca się w automatycznej identyfikacji i rejestracji danych, umożliwia użytkownikom profesjonalne odczytywanie i generowanie kodów kreskowych za pomocą smartfona – bez dodatkowych kosztów. Bezpłatna aplikacja BradyScan zapewnia doskonałe skanowanie DPM, opcje integracji z zapleczem, kontrolę bezpieczeństwa kodów QR oraz technologię OCR do konwersji obrazu na tekst.
OMS jako element nowego standardu w świetle regulacji prawnych – certyfikowane rozwiązanie w zarządzaniu bezpieczeństwem pożarowym

Rosnące znaczenie zdalnego pozyskiwania i archiwizacji danych eksploatacyjnych w budynkach wielorodzinnych sprzyja wdrażaniu rozwiązań umożliwiających integrację detekcji pożaru z infrastrukturą zdalnego...
Rosnące znaczenie zdalnego pozyskiwania i archiwizacji danych eksploatacyjnych w budynkach wielorodzinnych sprzyja wdrażaniu rozwiązań umożliwiających integrację detekcji pożaru z infrastrukturą zdalnego odczytu. Czujnik dymu Ei6500-OMS od Ei Electronics łączy autonomiczne wykrywanie potencjalnego zagrożenia z komunikacją radiową w otwartym standardzie OMS (Open Metering System). Umożliwia monitorowanie stanu urządzenia w ramach istniejącego środowiska technicznego. To rozwiązanie przeznaczone dla...
Ładowarki aut elektrycznych – jak wpływają na parametry jakości energii elektrycznej?

Dynamiczny rozwój elektromobilności wymusza błyskawiczną rozbudowę infrastruktury ładowania, co staje się jednym z największych wyzwań dla współczesnych systemów elektroenergetycznych. Instalacja stacji...
Dynamiczny rozwój elektromobilności wymusza błyskawiczną rozbudowę infrastruktury ładowania, co staje się jednym z największych wyzwań dla współczesnych systemów elektroenergetycznych. Instalacja stacji ładowania EV – odbiorników o znacznej mocy i nieliniowej charakterystyce – to proces znacznie bardziej złożony niż podłączenie standardowych urządzeń. Niesie on ze sobą ryzyko degradacji parametrów jakości zasilania (JEE), m.in. poprzez generację wyższych harmonicznych, asymetrię obciążeń oraz uciążliwe...
Aparatura pomiarowa do instalacji fotowoltaicznych

Systemy fotowoltaiczne stały się standardem w nowoczesnym budownictwie. Ich instalacja i konserwacja wymaga użycia odpowiednio przystosowanego oprzyrządowania. Ściśle wyspecjalizowana aparatura marki Sonel...
Systemy fotowoltaiczne stały się standardem w nowoczesnym budownictwie. Ich instalacja i konserwacja wymaga użycia odpowiednio przystosowanego oprzyrządowania. Ściśle wyspecjalizowana aparatura marki Sonel została zaprojektowana dla profesjonalistów właśnie do takich zastosowań.
Zima zweryfikowała polski rynek PV. Czy maty grzewcze w systemach Low Voltage to nowy standard bezpieczeństwa?

Ostatnia zima w Polsce stała się bezlitosnym poligonem doświadczalnym dla wielu domowych magazynów energii. Problemy z wydajnością chemii litowej w niskich temperaturach oraz blokady ładowania w systemach...
Ostatnia zima w Polsce stała się bezlitosnym poligonem doświadczalnym dla wielu domowych magazynów energii. Problemy z wydajnością chemii litowej w niskich temperaturach oraz blokady ładowania w systemach Low Voltage (LV) stały się codziennością wielu instalatorów. W odpowiedzi na te wyzwania, SolaX wprowadza rozwiązanie, które do tej pory było zarezerwowane dla segmentu Premium High Voltage – zintegrowane maty grzewcze w bateriach do falowników NEO.
Kable światłowodowe z zachowaniem integralności obwodu jako kluczowy element nowoczesnych systemów ochrony przeciwpożarowej

Współczesne systemy ochrony przeciwpożarowej nie ograniczają się już wyłącznie do wykrywania i sygnalizowania pożaru. Obecnie stanowią one złożone, zintegrowane platformy bezpieczeństwa, których zadaniem...
Współczesne systemy ochrony przeciwpożarowej nie ograniczają się już wyłącznie do wykrywania i sygnalizowania pożaru. Obecnie stanowią one złożone, zintegrowane platformy bezpieczeństwa, których zadaniem nie jest jedynie alarmowanie, lecz również aktywne sterowanie przebiegiem ewakuacji oraz ograniczanie skutków pożaru. Systemy te funkcjonują jako jeden spójny organizm, w którym poszczególne podsystemy wymieniają między sobą dane w czasie rzeczywistym i reagują automatycznie na rozwój zagrożenia.