Dobór urządzeń sterujących dla adaptacyjnego systemu sterowania (część 1.) - kryteria doboru urządzeń
Selection of control devices for an adaptive control system. Part 1: Criteria for the selection of devices
W artykule przedstawiono wymagania techniczne i analizę właściwości technicznych programowalnych elementów kontrolera automatyki oraz układów mikroprocesorowych, porównanie IPC, PLC, PAC i MC. Wymieniono też czynniki wpływające na eksploatację systemów.
Kluczowym
zagadnieniem dla adaptacyjnego układu sterowania jest dobór odpowiedniego
urządzenia sterującego zapewniającego możliwość zaprogramowania
i wykonania przewidywanych algorytmów, łatwość obsługi, atrakcyjność dla
użytkownika komercyjnego itp.
W artykule:• Wymagania techniczne systemu TESSe2b• Analiza właściwości technicznych elementów kontrolera systemu TESSe2b • Porównanie IPC, PLC, PAC i MC • Czynniki wpływające na eksploatację systemu |
Przedstawiona analiza urządzeń sterujących została dokonana na potrzeby systemu TESSe2b (Thermal Energy Storage System for Energy Efficient Buildings. Application in domestic solar thermal systems and heat pumps. Polska nazwa: Cieplny system magazynowania energii dla budynków energooszczędnych. Zastosowany w domowych instalacjach solarnych i z pompami ciepła).
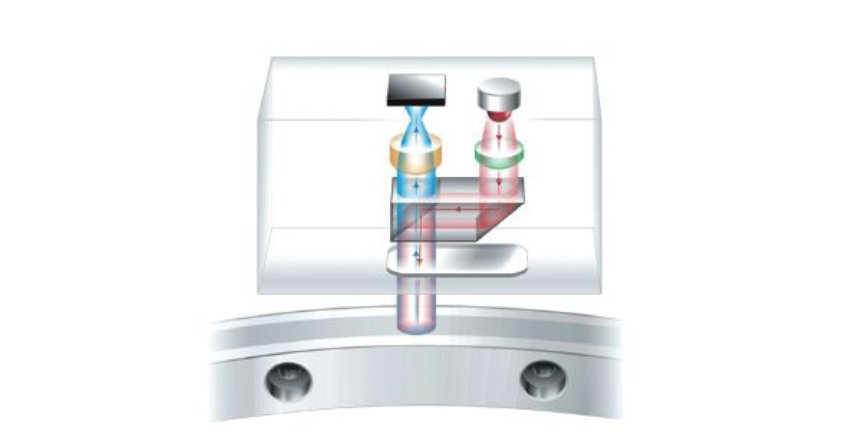
Idea działania systemu TESSe2b przedstawiona została na rys. 1.

Rys. 1. Idea działania systemu TESSe2b [http://www.tesse2b.eu]
Najbardziej efektywne jest wykorzystywanie energii w miejscu jej wytwarzania, ale ze względu na jej nierównomierne zużycie i wytwarzanie w ciągu dnia jest konieczne jej magazynowanie. Opracowanie ekonomicznie opłacalnej technologii umożliwiającej długookresową akumulację ciepła i chłodu jest celem czteroletniego projektu o budżecie 4.311.700 €, który jest realizowany przez międzynarodowe konsorcjum 7 jednostek naukowych oraz 3 partnerów przemysłowych w ramach programu badawczego Unii Europejskiej Horyzont 2020.
W ramach projektu będzie rozwijana technologia mająca na celu poprawę właściwości fizykochemicznych materiałów zmiennofazowych oraz zaawansowany system inteligentnego zarządzania energią.
Opracowany system jest obecnie wdrażany w trzech instalacjach pilotażowych w Austrii, Hiszpanii i na Cyprze, w celu oceny możliwości implementacji rozwiązania TESSe2b w różnych warunkach klimatycznych oraz analizy kosztów inwestycyjnych i eksploatacyjnych. Jeżeli przeprowadzone w instalacjach pilotażowych testy eksploatacyjne okażą się pozytywne opracowana technologia zostanie wprowadzona do sprzedaży w Unii Europejskiej.
Wymagania techniczne
Analizując schemat hydrauliczny systemu TESSe2b należy zauważyć, że system zbudowany jest z elementów załączanych i wyłączanych w sposób binarny (np. pomp obiegowych, zaworów), jak również elementów wymagających regulacji ciągłej (np. wydajność pomp obiegowych), czujników temperatur, ciśnienia oraz przepływu.
Do sterowania pracą takiego systemu niezbędny jest kontroler posiadający:
- wejścia i wyjścia dyskretne,
- wejścia i wyjścia analogowe,
- opcjonalnie przeznaczone dla danego typu czujników wejścia analogowe,
- zegar czasu rzeczywistego,
- protokoły komunikacyjne.
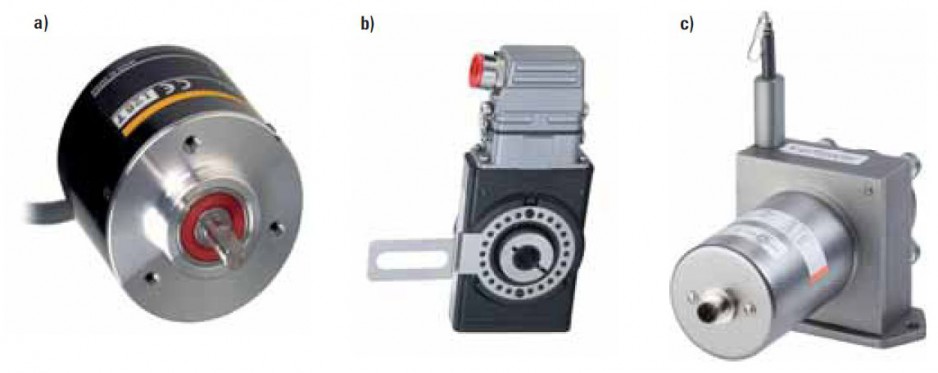
Zastosowany kontroler powinien charakteryzować się dużą niezawodnością, łatwością obsługi, funkcjonalnością, możliwością tworzenia baz danych eksploatacyjnych, możliwością zdalnego podglądu pracy systemu i dostępu do baz danych. Dostępne na rynku urządzenia stosowane w automatyce przemysłowej można podzielić na cztery główne grupy:
- swobodnie programowalne sterowniki (PLC),
- kontrolery automatyki (PAC),
- układy mikroprocesorowe (MC),
- komputery przemysłowe (IPC).
Każde stosowane urządzenie ma wbudowane lub może współpracować z wymaganymi dla systemu modułami: wejść i wyjść dyskretnych, analogowych oraz dedykowanych.
Każdy z modułów posiada pewne specyficzne właściwości, które determinują jego zastosowanie w konkretnej aplikacji: liczbę obsługiwanych wejść i wyjść dyskretnych, analogowych, dedykowanych (np. dla czujników temperatury) oraz możliwość:
- rozbudowy hardwaru,
- współpracy z urządzeniami peryferyjnymi (m.in. HMI, tabletem, smartfonem),
- wizualizacji pracy (np. system SCADA),
- implementacji: webserwera, protokołów komunikacyjnych i modeli matematycznych
i - co bardzo istotne w zastosowaniach komercyjnych - cenę.
Analiza właściwości technicznych elementów kontrolera
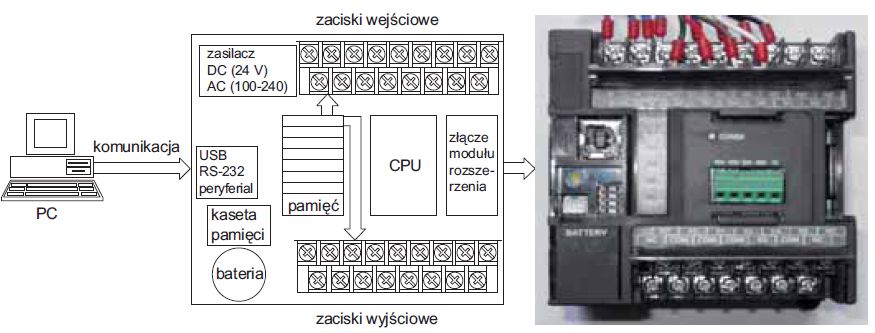
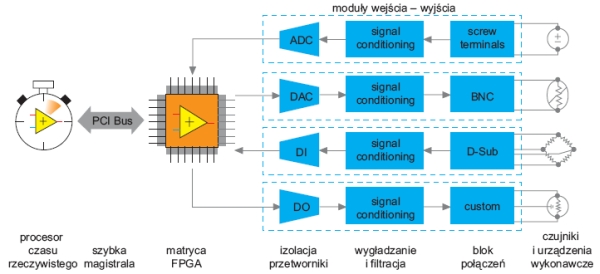
Niezależnie od typu urządzenia sterującego, w jego budowie można wyróżnić następujące komponenty: zasilacz (zasilanie), jednostkę centralną, moduły wejść cyfrowych i analogowych oraz wyjść cyfrowych i analogowych, moduł komunikacji.
Zasilanie
Kontrolery mogą być zasilane napięciem sieciowym 110 V ac albo 230 V ac lub napięciem stałym o wartości 24 V dc. Urządzenie może posiadać wbudowany fabrycznie dodatkowy zasilacz 24 V. Takie zasilacze mają często niewielką moc, która może być niewystarczająca do zasilenia innych podzespołów układu sterowania.
Jednostka centralna
Central Proccessing Unit (CPU) jest to element odpowiedzialny za przechowywanie i wykonywanie zaimplementowanego algorytmu regulacji.Parametry jednostki centralnej można scharakteryzować poprzez:
- wielkość pamięci,
- szybkość działania,
- napięcie zasilania,
- możliwość pracy w sieci jako Master – Slave,
- rodzaj oprogramowania,
- liczbę dostępnych procedur i bloków funkcyjnych oprogramowania,
- możliwość pracy w sieci i zaimplementowane protokoły komunikacyjne,
- liczbę dozwolonych modułów rozszerzających,
- możliwość rozszerzania pamięci.
We wszystkich grupach kontrolerów pamięć jednostki centralnej zawiera obszar przeznaczony na wewnętrzne procedury CPU, który nie jest dostępny dla użytkownika. Pamięć przeznaczona na dane użytkownika dzieli się na:
- obszar danych wejściowych (adresy wejść dyskretnych i analogowych),
- obszar danych wyjściowych (adresy wyjść dyskretnych i analogowych),
- obszar danych użytkownika (pamięć pomocnicza).
W pamięci pomocniczej mogą być przechowywane dane i zmienne związane z licznikami, przekaźnikami czasowymi oraz zmiennymi pomocniczymi, itp.
Obok pamięci wewnętrznej CPU, kontrolery są często wyposażane w wymienne karty zewnętrznej pamięci flash. Pozwala to na znaczne rozbudowanie funkcjonalności, nie tylko umożliwiając wprowadzanie dłuższych programów, ale także pozwala na gromadzenie dużej ilości danych.
W niektórych typach sterowników cały program użytkownika zapisywany jest na karcie pamięci flash, co umożliwia bardzo szybkie przeprogramowanie sterowników, poprzez wymianę kart pamięci, bez potrzeby podłączania sterownika do programatora.
Za pomocą zewnętrznej karty pamięci możliwa jest również aktualizacja firmwaru CPU.
Istotnym parametrem technicznym w ocenie jakościowej CPU jest częstotliwość pracy i rodzaj procesora głównego.
We współczesnych sterownikach stosowane są układy mikroprocesorowe 8-, 16- lub 32-bitowe.
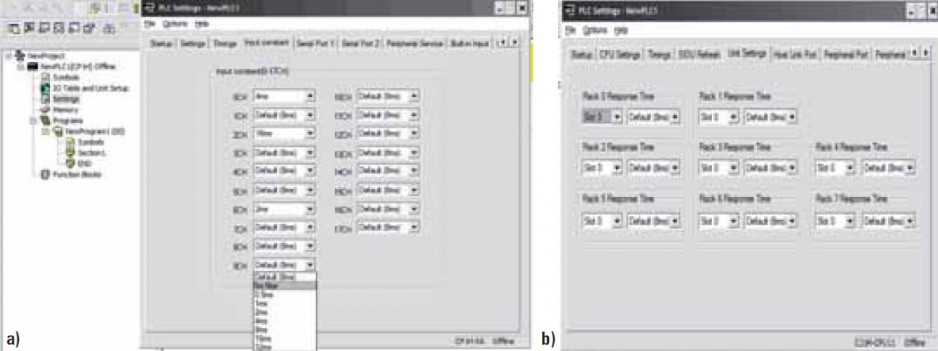
Wejścia dyskretne
Wejścia dyskretne umożliwiają dostarczanie informacji o stanie pracy urządzeń wykonawczych. Rozpoznają one dwa poziomy sygnału niski i wysoki.
Sygnałem sterującym jest standartowo napięcie stałe.
Istotne paramenty wejść dyskretnych to:
- napięcie znamionowe,
- liczba wejść modułu,
- ewentualnie liczba grup jeśli wejścia są łączone w grupy,
- napięcie przebicia izolacji,
- parametry elektryczne wejścia dla stanu załączenia i wyłączenia,
- czas odpowiedzi po zadziałaniu i po zwolnieniu,
- pobór prądu,
- warunki pracy – temperatura, wilgotność, drgania itp.
Wyjścia dyskretne
Wyjścia dyskretne umożliwiają załączenie lub wyłączenie elementów wykonawczych. Produkowane są dwa typy wyjść dyskretnych:
- przekaźnikowe o małej częstotliwości załączeń,
- tranzystorowe o wysokiej częstotliwości oraz bardzo dużej dopuszczalnej liczbie załączeń.
Wyjścia dyskretne posiadają separację galwaniczną oraz produkowane są podobnie jak wejścia dyskretne na napięcie 24 V DC lub 110/230 V AC. Wyjścia dyskretne przyjmują dwa stany pracy: wyłączony lub załączony.
Za główne parametry techniczne modułu wyjść cyfrowych należy uważać:
- napięcie znamionowe,
- liczba wyjść modułu,
- ewentualnie liczba grup, jeśli wyjścia są łączone w grupy,
- napięcie przebicia izolacji,
- parametry elektryczne wyjścia dla stanu załączenia i wyłączenia,
- natężenie prądu w jednym obwodzie,
- maksymalna suma prądów we wszystkich obwodach,
- czas odpowiedzi po zadziałaniu i po zwolnieniu,
- pobór prądu i warunki pracy.
Analiza właściwości technicznych elementów kontrolera (dokończenie)
Wyjścia przekaźnikowe
Wyjścia przekaźnikowe zapewniają pełną separację galwaniczną wewnętrznych układów sterownika i obwodów wyjściowych.
Cewki przekaźników mogą być zasilane napięciem 24 V DC lub 110/230 V AC.
Przekaźniki charakteryzują się stosunkowo niewielką częstotliwością włączeń oraz ograniczoną żywotnością wynoszącą około 1 mln cykli łączeniowych. Należy mieć to na uwadze, projektując układy sterowania charakteryzujące się ciągłą pracą, przy dużej liczbie przełączeń.
Wyjścia przekaźnikowe w porównaniu z tranzystorowymi mają wyższą obciążalność (około 3 A).
W celu ograniczenia niebezpieczeństwa powstawania łuku elektrycznego na zestykach przekaźników, wyjścia są bocznikowane filtrami RC lub warystorami.
W przypadku napięcia przemiennego, przy otwartych zestykach przekaźnika przez obwód RC płynie prąd, co może utrudnić sterowanie odbiorników o dużej rezystancji i niewielkiej mocy znamionowej.
Równolegle do odbiornika należy wówczas włączyć dodatkowy rezystor.
Stosując sterowniki z wyjściami przekaźnikowymi w obwodach prądu stałego, należy liczyć się z niebezpieczeństwem uszkodzenia zestyków przez łuki łączeniowe powstające przy wyłączaniu cewek charakteryzujących się znaczną indukcyjnością (styczniki, silniki, elektrozawory).
W celu ograniczenia tego niebezpieczeństwa równolegle do danej cewki należy włączyć diodę.
Wyjścia tranzystorowe
Wyjścia tranzystorowe zapewniają separację galwaniczną między CPU a obwodami wyjściowymi. Można je stosować jedynie przy zasilaniu obwodów wyjściowych prądem stałym o napięciu 24 V dc.
Obciążalność wyjść tranzystorowych jest niewielka do około 0,5 A. Charakteryzują się wysoką częstotliwością pracy oraz dużą żywotnością.
Często sterowniki mają kilka rodzajów wyjść tranzystorowych różniących się dopuszczalną częstotliwością, zwykle w zakresie od 1 kHz do kilkudziesięciu kHz. Tego rodzaju wyjścia przeznaczone są do układów sterowania charakteryzujących się ciągłą pracą przy dużej liczbie przełączeń, np. sterowanie silnikami krokowymi.
W celu ograniczenia niebezpieczeństwa powstawania łuku elektrycznego w obwodach prądu stałego także stosuje się odpowiednie zabezpieczenia.
Wejścia analogowe
Wejścia analogowe umożliwiają dostarczanie ciągłej informacji zmianie w czasie mierzonych wartości fizycznych, mogą być konfigurowane programowo na typ sygnału analogowego: napięciowy lub prądowy.
Moduły wejść analogowych są zazwyczaj odseparowane galwanicznie i mogą być dostosowane do różnych zakresów sygnałów wejściowych analogowych.
Standardowymi zakresami sygnałów analogowych są napięcia:
- 0 do 1 V dc,
- 0 do 10 V dc,
- 1 do 5 V dc,
- –10 do 10 V dc,
- –5 do 5 V dc
oraz napięcie pochodzące z czujników termoelektrycznych lub prądy:
- 4 do 20 mA
- i 0 do 20 mA dc.
Moduły wejść analogowych zawierają w sobie przetworniki analogowo-cyfrowe.
Parametrem charakteryzującym moduł wejść analogowych jest liczba bitów przetwornika analogowo cyfrowego. Im większa liczba bitów przetwornika tym dokładniejsza dyskretyzacja przetwarzanego sygnału.
Najczęściej są stosowane przetworniki 12-, 14-, i 16-bitowe.
Parametrami metrologicznymi wejść analogowych są:
- rozdzielczość,
- dokładność,
- liniowość,
- tłumienie napięcia wspólnego,
- tłumienie zakłóceń międzykanałowych,
- czas uaktualnienia,
a także:
- liczba kanałów,
- zakresy prądu lub napięcia wejściowego,
- dopuszczalny zakres napięcia wejściowego,
- kalibracja,
- dokładność bezwzględna,
- napięcie przebicia izolacji,
- impedancja wejściowa,
- zakres napięcia dla zasilania zewnętrznego.
Dedykowane wejścia analogowe
Dedykowane wejścia analogowe są dostosowane do określonego zakresu sygnałów.W praktyce stosowane są wejścia dedykowane do konkretnych czujników pomiarowych np. termoelementów, czy czujników termorezystancyjnych np. Pt-100. Pozwala to na bezpośrednie podłączenie czujników.
W przypadku podłączenia np. czujnika termorezystancyjnego do standardowego wejścia analogowego należy zastosować dodatkowy przetwornik, który dokona konwersji zmian rezystancji czujnika na standartowy sygnał analogowy.
Zastosowanie dodatkowego przetwornika zwiększa niepewność pomiaru.
Wyjścia analogowe
Wyjścia analogowe są niezbędne w układach regulacji oraz do sterowania pracą analogowych elementów i urządzeń wykonawczych (np. zmiana wydajności pompy obiegowej, sterowanie położeniem zaworu, sterowanie mocą pompy ciepła itp.).
W celu przetworzenia generowanego przez CPU cyfrowego sygnału nastawczego na sygnał analogowy stosowny jest przetwornik cyfrowo analogowy. Parametrem charakteryzującym przetwornik jest jego rozdzielczość.
Najczęściej stosowane są przetworniki 12-, 14- lub 16-bitowe.
Moduły wyjść analogowych generują sygnał prądowy (na ogół: 4 do 20 mA lub 0 do 20 mA) lub napięciowy (na ogół: 0 do 10 V, ±5 V lub ±10 V).
Im większa rozdzielczość przetwornika, tym sygnał cyfrowy na analogowy przetwarzany jest z większą dokładnością. Rodzaj oraz zakres sygnału analogowego definiowany jest programowo.
Moduł komunikacyjny
Moduł komunikacyjny służy do programowania kontrolera oraz umożliwia komunikację z innymi urządzeniami, np. panelem operatorskim czy programem SCADA.
Jest wiele protokołów komunikacyjnych. Najbardziej popularne i najczęściej stosowane to: Modbus/TCP, Profibus, MPI, ControlNet, Ethernet IP, CAN.
Zewnętrznym elementem modułu są złącza komunikacyjne, najczęściej standardu RS-232, RS-485, RJ-45, USB.
Liczba i rodzaj złącz są umieszczane w specyfikacji technicznej.
W razie potrzeby połączenia urządzeń o tym samym protokole komunikacyjnym ale innych typach złącz lub innych protokołach komunikacyjnych, należy stosować odpowiednie konwertery.
Czasami na przewodach łączeniowych producenci stosują zabezpieczające konwertery elektroniczne, co obliguje użytkownika do zakupu konkretnego przewodu łączeniowego.
Specyfikacje przewodów mogą być jawnie dostępne lub stanowić tajemnicę firmy.
Poszczególne protokoły komunikacyjne różnią się prędkością transferu danych i są stosowane do komunikacji pomiędzy jednostką centralną a innymi urządzeniami i elementami systemu.
Porównanie IPC, PLC, PAC i MC
Ze względu na parametry i możliwości techniczne wybór pomiędzy sterownikiem PLC, komputerem przemysłowym IPC, programowalnym kontrolerem automatyki PAC i mikrokontrolerem MC jest trudny. Wszystkie cztery grupy kontrolerów posiadają charakterystyczne cechy użytkowe. W celu wyboru kontrolera dla adaptacyjnego systemu należy dokonać analizy porównawczej kilku kluczowych z punktu eksploatacji czynników:
- sposobu wykonywania opracowanego programu sterującego,
- poziomu odporności sprzętu na warunki środowiskowe,
- zakresu integracji komponentów sprzętowych,
- bezpieczeństwa aplikacji,
- sposobu wykonywania algorytmu sterowania,
- języka programowania,
- automatycznego generowania kodu z wykorzystaniem programów symulacyjnych,
- wyboru systemu operacyjnego.
Sposoby wykonywania opracowanego programu sterującego
Sterowniki PLC bazują na systemach operacyjnych czasu rzeczywistego. Stosowane procesory umożliwiają również aplikację zegarów czasu rzeczywistego. Zapewnia to wysoki poziom techniczny implementowanego algorytmu regulacji oraz wysoki poziom niezawodności projektowanego systemu sterowania.
Sterowniki PLC wykonują algorytm sterowania korzystając ze specyficznego systemu operacyjnego stworzonego przez producenta urządzenia.
Ze względu na specyfikę systemu operacyjnego sterowniki PLC są odporne na działanie wirusów i nie wymagają stosowania dodatkowych narzędzi softwarowych, takich jak oprogramowanie antywirusowe. Jednakże przy błędnej konfiguracji priorytetów i czasów realizacji zadań sterowania sterownik PLC może zostać automatycznie przełączony w tryb serwisowy (awaria). Mimo wszystko często zdarza się, że producenci sterowników PLC dokonują modyfikacji oprogramowania służącego do programowania sterowników PLC (dodają nowe funkcje) oraz firmwaru sterownika PLC.
Nowa wersja software wymaga dodatkowego zakupu przez programistę.
Aktualizacja firmware jest zazwyczaj dostępna za darmo. Komputery przemysłowe IPC, podobnie jak sterowniki PLC, mają wbudowane jądro czasu rzeczywistego, co umożliwia wykonywanie zaimplementowanego algorytmu regulacji w czasie rzeczywistym.
Komputery IPC zapewniają również wysoki poziom funkcjonalności i niezawodności, jednakże ze względu na fakt stosowania identycznych systemów operacyjnych jak w komputerach osobistych są bardziej podatne na wirusy oraz na zawieszenie działania. Konieczne jest zatem stosowanie programów antywirusowych.
W komputerach przemysłowych IPC dąży się do zwiększenia odporności na zawieszenia przez ograniczenie funkcji systemu operacyjnego i dopasowaniu funkcjonalności systemu operacyjnego do zastosowania w sterowaniu w procesach produkcyjnych.
W przypadku wystąpienia awarii softwarowej jądro czasu rzeczywistego komputera jest zabezpieczone i funkcjonuje prawidłowo bez przerwy. Gwarantuje to wykonywanie zaimplementowanego algorytmu sterowania bez przerwy.
Ze względu na większą pamięć operacyjną w porównaniu ze standartowymi sterownikami PLC komputery przemysłowe IPC umożliwiają implementację bardziej skomplikowanych algorytmów regulacji.
Programowalne kontrolery automatyki PAC, podobnie jak sterowniki PLC i IPC, mają wbudowane jądro czasu rzeczywistego.
Ze względu na fakt, że PAC łączą w sobie funkcjonalność i cechy użytkowe sterowników PLC i komputerów przemysłowych IPC są one kontrolerami najbardziej zaawansowanymi technicznie.
Wbudowane jądro czasu rzeczywistego, możliwość wyboru systemu operacyjnego oraz duża pamięć operacyjna umożliwiają nie tylko realizację funkcji sterowniczych w czasie rzeczywistym, ale również monitoring pracy systemu oraz akwizycję danych pomiarowych.
W przypadku stosowania w programatorze PAC systemów operacyjnych używanych w komputerach osobistych wymagana jest ochrona antywirusowa. Mikrokontrolery pracują ze stałym czasem próbkowania.
Odporność na wpływ warunków środowiskowych
Ze względu na konstrukcję sterowniki PLC charakteryzują się dużą trwałością oraz odpornością na warunki środowiskowe.
W konstrukcji komputerów przemysłowych IPC wyróżnić można wiele ruchomych elementów, takich jak wentylatory czy dyski twarde, z tego też względu tego typu urządzenia są mniej odporne na warunki środowiskowe, w rezultacie występuje większe prawdopodobieństwo awarii niż w przypadku sterowników PLC.
W komputerach IPC nowej generacji można zauważyć trend do stosowania dysków twardych wykonanych w technologii SSD (Solid State Driver) oraz chłodzenia bezwentylatorowego przez zastosowanie radiatorów, które mogą być dodatkowo stosowane w specjalnych obudowach.
Ze względu na budowę komputery przemysłowe IPC są mniej odporne na niekorzystne warunki pracy w porównaniu ze sterownikami PLC.
Wzrost odporności na niekorzystne warunki środowiskowe związany byłby ze wzrostem ceny, która w porównaniu ze sterownikami PLC jest i tak wysoka. Programowalne komputery automatyki PAC, podobnie jak komputery przemysłowe IPC ze względu na konstrukcję i wiele części ruchomych (dyski, wentylatory), są mniej odporne na niekorzystne warunki środowiskowe w porównaniu ze sterownikami PLC, ale bardziej niż komputery przemysłowe IPC.
Mikrokontrolery posiadają odporność na warunki środowiskowe, która zależy od technologii wykonania.
Kwestie serwisowe
Analizując koszty eksploatacji systemu bardzo istotne są koszty serwisowania systemu sterowania. Ważne jest, aby podczas całego cyklu życia systemu koszt serwisowania układu sterowania był niski, a serwis prosty i nie zbyt czasochłonny.
W przypadku sterowników PLC ze względu na konstrukcję oraz oprogramowanie serwis jest prosty i możliwy do wykonania w krótkim czasie.
- Wymiana zarówno uszkodzonych zewnętrznych modułów rozszerzających, jak i jednostki centralnej odbywa się w prosty sposób, minimalizując w ten sposób czas przestoju systemu.
- Wymiana elementów składowych sterownika odbywa się przy wyłączonym napięciu zasilania.
- Zmiana lub poprawka algorytmu sterowania pracą systemu jest możliwa bez zakłócenia pracy sterownika.
W przypadku komputerów IPC serwis w porównaniu ze sterownikami PLC ze względu na dostępność części jest utrudniony.
Rozwój technologiczny w komputerach IPC jest bardzo dynamiczny. Producenci dokonują bardzo często aktualizacji hardwaru oraz firmwaru urządzeń. W komputerach IPC w przypadku awarii konieczna jest wymiana uszkodzonego elementu najczęściej na identyczny.
Postęp technologiczny, który ma miejsce w branży komputerów IPC sprawia, że dostęp do części zapasowych w urządzeniach zainstalowanych w przeszłości jest ograniczony.
W komputerach IPC stosowana jest powszechnie technologia hot-swap, pozwalająca na wymianę komponentów systemu sterowania bez konieczności wyłączania zasilania.
W przypadku wymiany urządzenia peryferyjnego współpracującego z komputerem IPC poprzez jeden ze standartowych protokołów komunikacyjnych zazwyczaj konieczne jest wyłączenie zasilania urządzenia.
Jeżeli serwisant dysponuje częściami zamiennymi, a architektura sprzętowa komputera przemysłowego jest modułowa (częste rozwiązanie), serwis jest łatwy a czas wymiany komponentów podobny jest do tego ze sterowników PLC.
W przypadku programowalnych komputerów automatyki PAC podobnie jak dla komputerów przemysłowych IPC serwis jest prosty do wykonania, jeżeli tylko są dostępne części zamienne.
W przypadku awarii mikrokontrolera często konieczna może okazać się wymiana całego układu lub modułu.
Integracja komponentów sprzętowych
We wszystkich czterech grupach hardware dostępnych jest wiele standartowych protokołów komunikacyjnych umożliwiających integrację różnych urządzeń peryferyjnych.
Dostępne są powszechnie zarówno przemysłowe protokoły komunikacyjne. Do najbardziej popularnych należy zaliczyć: SERCOS, Profibus, DeviceNet oraz CANbus.
Dostępne są również protokoły bazujące na sieci Ethernet. Do najczęściej dostępnych należy zaliczyć: SERCOS III, Profinet, Ethernet/IP, EtherCAT, Ethernet Powerlink.
Sterowniki PLC mają zazwyczaj wbudowany jeden protokół komunikacyjny. Obecnie standardem jest Ethernet/TCPIP.
Implementacja innych protokołów komunikacyjnych wymaga rozbudowy hardware’u o dodatkowy moduł komunikacyjny.
Komputery przemysłowe IPC oraz PAC wymagają użycia dodatkowych kart oraz sterowników programowych do obsługi sieci, jednakże względu na możliwości sprzętowe (większa pamięć operacyjna, moc procesora) mają większe możliwości sprzętowe implementacji protokołów komunikacyjnych, m.in. interfejs USB, szeregowy, równoległy, FireWire czy też bezprzewodowe połączenia TCP/IP. Dzięki temu możliwa jest realizacja zadań niedostępnych w typowych sterownikach PLC. Przykładem może być współpraca z kamerą wizyjną i analiza obrazu wysokiej rozdzielczości.
Komputery przemysłowe IPC, jak i programatory automatyki PAC, mają w porównaniu ze sterownikami PLC możliwość budowania bardziej zaawansowanego interfejsu operatora, który obecnie jest nieodłącznym elementem systemu sterowania. W przypadku sterowników PLC interfejs użytkownika może składać się z: przełączników, paneli operatorskich, elementów sygnalizacyjnych (np. diody, żarówki), sygnalizacji dźwiękowej lub nawet komputerów panelowych.
Pomimo możliwości sprzętowych i komunikacyjnych, dość zaawansowanej technologii stosowanej w sterownikach PLC czasami nadal niezbędne jest stosowanie komputerów IPC lub PAC do realizacji aplikacji wymagających dużej ilości pamięci, wysokich mocy obliczeniowych oraz komunikacji z typowymi urządzeniami peryferyjnymi.
Bezpieczeństwo aplikacji
Bardzo istotną kwestią jest bezpieczeństwo aplikacji:
- ingerencji przez osoby nieuprawnione do algorytmu sterowania systemu,
- dostępu do archiwizowanych i przechowywanych danych procesowych.
Z tego też względu ważne jest zabezpieczenie przed nieautoryzowanym (a tym samym potencjalnie niebezpiecznym) dostępem z zewnątrz aplikacji (m.in. ataki wirusów) oraz ograniczenie praw dostępu do aplikacji sterowania dla różnego rodzaju użytkowników (ograniczenie możliwości zapisu, odczytu, widoczności plików w systemie).
Sterowniki PLC ze względu na specyficzne dla danego producenta oprogramowanie są mniej narażone na ataki wirusów oraz nieautoryzowany dostęp z zewnątrz. Nie oznacza to, że sterowniki PLC są odporne na wirusy, jednakże znanych jest zaledwie kilka przypadków ataków wirusów na systemy sterowania oparte na sterownikach PLC.
Komputery IPC oraz PAC ze względu na stosowane oprogramowanie są bardziej podatne na ataki wirusów. Dzięki standaryzacji systemów operacyjnych poza oprogramowaniem antywirusowym pozwalają w elastyczny sposób kształtować zarówno zakres, jak i sposób zabezpieczeń.
Zarówno sterowniki PLC, jak i IPC oraz PAC choć w różny sposób – pozwalają na ustalanie poziomów dostępu do plików systemowych oraz danych procesowych.
Sposób wykonywania algorytmu sterowania
Podstawową różnicą pomiędzy sterownikami PLC, a komputerami PC jest sposób wykonywania programu sterowania.
W sterownikach PLC algorytm wykonywany jest cyklicznie w pętli:
- sterownik PLC w zamkniętej pętli czyta poszczególne linie programu od pierwszej do ostatniej,
- po przeczytaniu ostatniej linijki programu następuje automatycznie powrót do pierwszej linii programu sterującego.
Zadania sterowania wykonywane są zależnie od występujących w systemie sterowania zdarzeń.
W komputerach IPC oraz PAC zadania wykonywane są głównie zależnie od pojawiających się zdarzeń. Mechanizm skanu programu sprawia, że zadania nie mogą być synchronizowane systemowo i muszą oczekiwać na wykonanie, aż procesor sterownika zakończy obsługę funkcji o wyższych priorytetach.
Język programowania
Zarówno w sterownikach PLC, komputerach IPC i PAC, jak mikrokontrolerach MC obowiązują języki programowania zgodne z normą IEC 61131-3.
Do programowania sterowników PLC najczęściej używane są:
- język schematów drabinkowych (LAD),
- język listy instrukcji,
- język tekstu ustrukturyzowanego,
- język sekwencyjny,
- język bloków funkcji.
Języki programowania dostępne w sterownikach PLC są językami prostymi i intuicyjnymi dla programisty, umożliwiającymi implementację skomplikowanych algorytmów regulacji jednakże posiadają pewne ograniczenia – ze względu na możliwości języka programowania trudno jest zaimplementować algorytm regulacji realizowany w pętli.
W komputerach przemysłowych IPC oraz PAC najczęściej implementowane są zaawansowane języki programowania C/C++ i .NET, które nie mają żadnych ograniczeń odnośnie poziomu komplikacji algorytmu regulacji.
Automatyczne generowanie kodu z wykorzystaniem programów symulacyjnych
Wzrost mocy obliczeniowej procesorów stosowanych w sterownikach PLC oraz rozwój specjalistycznego oprogramowania symulacyjnego umożliwił połączenie etapu badań symulacyjnych mających na celu np. zaprojektowanie regulatora z etapem implementacji zaprojektowanego regulatora w sterowniku PLC. Takie rozwiązanie było możliwe za pomocą implementacji w sterownikach PLC języka strukturalnego.
Rozwiązanie to umożliwia przeprowadzenie badań symulacyjnych w programie Matlab/Simulink firmy MathWorks, a następnie wygenerowanie kodu sterowania np.: regulatora i implementacji w sterowniku.
Nowe narzędzie programistyczne otwiera nowe możliwości przed programistami. Umożliwia skrócenie czasu projektowania i wdrożenia algorytmu regulacji.
Wybór systemu operacyjnego
Niektórzy producenci programatorów automatyki PAC próbują łączyć zalety kilku systemów operacyjnych, oferując produkty pracujące w oparciu o system czasu rzeczywistego i system operacyjny Windows XP. Przykładem jest platforma AR010 firmy Bernecker & Reiner i Twin-CAT PLC firmy Beckhoff. W trakcie uruchamiania sterowników National Instruments serii PXI można wybrać jeden z systemów operacyjnych, który ma zostać załadowany: system ogólnego użytku (Windows XP/7/8/10) lub czasu rzeczywistego.
Czynniki wpływające na eksploatację
Wybór platformy systemu sterowania pracą systemu powinien być uzależniony od specyfikacji technicznej systemu, wymagań użytkownika, funkcjonalności oraz kosztów platformy. Koszt platformy sterowania uzależniony jest w głównej mierze od takich czynników, jak:
- wydajność (moc obliczeniowa) systemu sterowania,
- możliwość rozbudowy systemu w trakcie użytkowania,
- warunki środowiskowe, w których będzie pracować system,
- planowany czas uruchomienia aplikacji.
Wydajność systemu
Wydajność systemu (moc obliczeniowa) sterowania uzależniona jest w znacznej mierze od ilości obliczeń, liczby obsługiwanych urządzeń peryferyjnych, liczby obsługiwanych wejść i wyjść binarnych oraz analogowych, liczby podłączonych czujników pomiarowych oraz ilości przetwarzanych danych. Im liczba obsługiwanych urządzeń i ilość przetwarzanych danych jest większa rozwiązania bazujące na komputerach przemysłowych IPC lub programatorach automatyki PAC mimo wyższej ceny rynkowej będą bardziej ekonomiczne.
W przypadku małej liczby odsługiwanych urządzeń wykonawczych i peryferyjnych oraz małej ilości przetwarzanych danych pomiarowych tańszym rozwiązaniem jest zastosowanie sterownika PLC lub mikrokontrolera MC.
Możliwość rozbudowy systemu w trakcie użytkowania
Ważnym czynnikiem jest możliwość rozbudowy systemu sterowania podczas eksploatacji.
Podczas eksploatacji systemu może wystąpić konieczność rozbudowy systemu sterowania.
Rozbudowa systemu sterowania jest możliwa w przypadku modułowej budowy kontrolera. Istnieje wówczas możliwość dodania modułów rozszerzeń wejść/wyjść dyskretnych bądź analogowych, modułów dedykowanych czy komunikacyjnych umożliwiających dołączenie dodatkowych urządzeń peryferyjnych.
W przypadku gdy nie jest wymagana szeroka funkcjonalność systemu sterowania i nie zakładana jest możliwość rozbudowy w przyszłości, wówczas tańszym rozwiązaniem jest zastosowanie kontrolera o budowie kompaktowej o architekturze dopasowanej do wymagań istniejącego systemu. Tańszym rozwiązaniem jest zastosować wówczas sterownik PLC.Koszt sterownika z uwagi na jego zoptymalizowaną naturę zwykle jest niższy w przypadku mniej wymagających aplikacji, gdzie rozszerzalność nie jest aż tak istotna jak pozostałe aspekty wyboru.
Niestety koszty aplikacji rosną gwałtownie w miarę wzrostu liczby dołączanych urządzeń zewnętrznych. Wówczas korzystniej zastosować jest IPC bądź PAC.
Warunki środowiskowe, w których będzie pracować system
Istotnym czynnikiem generującym koszty platformy sterowania są warunki środowiskowe pracy kontrolera. Jeśli warunki środowiskowe są trudne, lepszym rozwiązaniem jest zastosowanie sterownika PLC. Zastosowanie w takim przypadku komputerów IPC czy kontrolerów PAC będzie generowało wyższe koszty eksploatacji.
Czas opracowania oprogramowania sterującego
Czynnikiem wpływającym na koszty systemu sterowania jest również czas opracowania programu sterującego oraz przeszkolenie użytkowników systemu odnośnie możliwości kontroli jego pracy.
Zazwyczaj koszt opracowania programu sterującego jest zawarty w cenie całego systemu. Na koszt opracowania systemu sterowania ma wpływ poziom komplikacji algorytmu sterowania, jaki musi zostać zaimplementowany w kontrolerze oraz język programowania w jakim ma być napisany algorytm.
Kierując się tym kryterium tańszym rozwiązaniem będzie zastosowanie sterownika PLC, do programowania którego można posłużyć się jednym z języków programowania zgodnym z normą IEC 61131-3, np. LAD, w którym dostępnych jest wiele funkcji ułatwiających implementację systemów sterowania. Z tego też względu zastosowanie sterownika PLC do regulacji pracą systemu może okazać się tańszym rozwiązaniem od systemów sterowania opartych na technologii komputerowej, IPC czy PAC.
Podsumowanie
Dokonując wyboru platformy sterowania systemem należy odpowiedzieć na kilka podstawowych pytań m.in. ile jest niezbędnych wejść i wyjść dyskretnych oraz analogowych, oraz modułów dedykowanych (pomiar temperatury, moduły komunikacyjne). Jakie są wymagania klienta pod względem urządzeń peryferyjnych, do jakiej liczby funkcji powinien mieć dostęp użytkownik a do jakiej serwisant. Dobrze dobrana platforma sterowania powinna charakteryzować się dobrym wskaźnikiem możliwości technicznych do ceny. Podejmując decyzję należy rozważyć zatem prostotę, odporność otwartość platformy i funkcjonalność.
W tabeli 1. przedstawiono porównanie podstawowych parametrów technicznych oraz parametrów wpływających na koszt wyboru kontrolera systemu.
Podziękowanie
Projekt TESSe2b jest finansowany ze środków Unii Europejskiej z programu Horyzont 2020 Research Innovation Action (RIA), konkurs EeB-Energy-efficient Buildings (Umowa nr 680555).
![Rys. 1. Idea działania systemu TESSe2b [http://www.tesse2b.eu]](https://www.elektro.info.pl/media/cache/typical_view/data/201905/dobor-urzadzen-rys1.jpg)