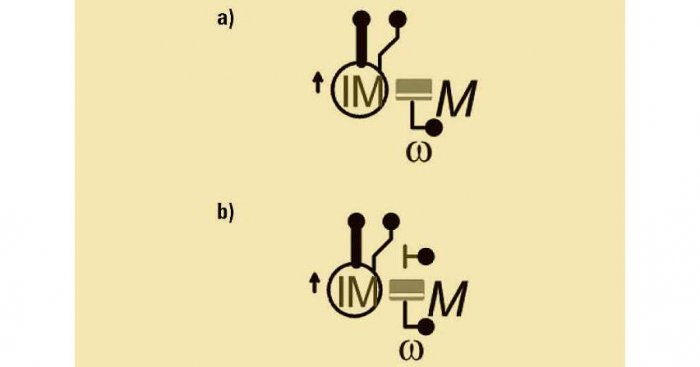
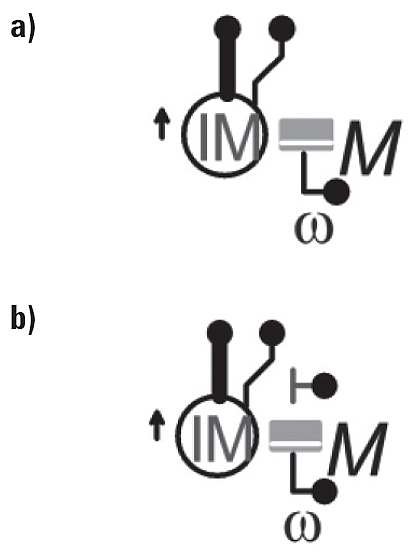
Rys. 1. Symbol graficzny modelu ma 2 postacie: a) z rys. 1 a, i b) z rys. 1b. Szczegóły zawarte są w tekście.
Fot. B. Karolewski
W programie
ATP istnieje gotowy model maszyny indukcyjnej, oznaczony symbolem UM_3 [1]. Jego
wykorzystanie opisano w literaturze [2, 3, 4, 5]. Wydawałoby się zatem, że
zastosowanie tego modelu nie powinno stanowić problemu. Na ogół tak jest
w przypadku modelowania pojedynczego silnika lub generatora. Niestety
w przypadku prób analizowania współpracy 2 lub 3 maszyn indukcyjnych
zasilanych ze wspólnej rozdzielni, mogą wystąpić różne trudności.
postać przedstawiona na rys. 1a. dotyczy przypadku, gdy w ustawieniach programu ATP/Settings/Switch/UM wybrano opcję ręcznego wprowadzania warunków początkowych (Initialization Manual),
postać z rys. 1b odpowiada wyliczaniu warunków początkowych przez program (Initialization Automatic).
W pierwszym przypadku, przy wprowadzaniu danych modelu UM_3, w zakładce Init można podać początkowe wartości składowych prądów stojana i wirnika oraz prędkości i kąta początkowego rotora.
Jeśli rozważa się rozruch maszyny, można te wartości pozostawić zerowe. Natomiast przy automatycznym wyznaczaniu warunków początkowych, w zakładce Init modelu podaje się tylko poślizg początkowy.
Niektórzy autorzy twierdzą, że dla uniknięcia błędu przepełnienia numerycznego, w przypadku rozruchu, zamiast 100% należy podać 99,99% [3]. W wykonanych badaniach taka konieczność nie wystąpiła.
Parametry modelu
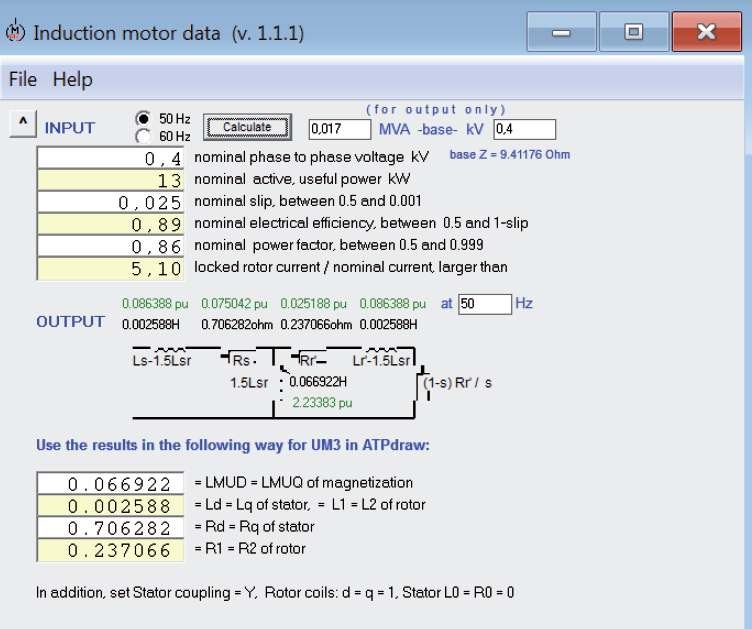
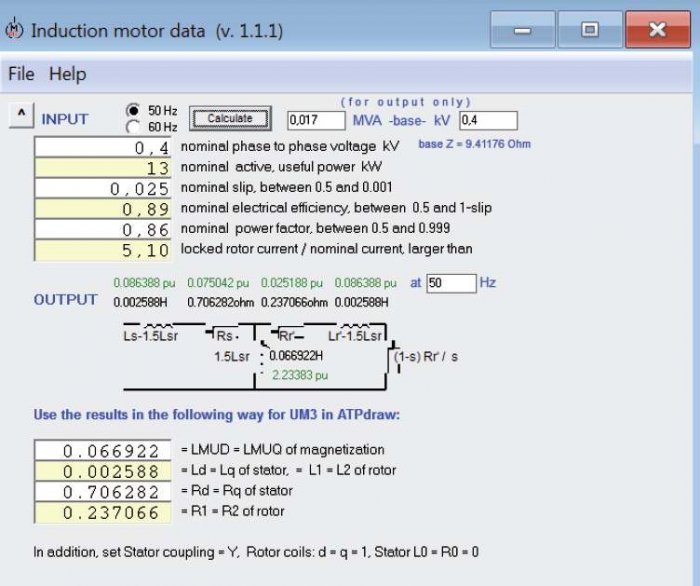
Danymi, które wykorzystuje się w modelu, są parametry jednofazowego schematu zastępczego silnika. Parametry te można wyliczyć wykorzystując program WindSyn, wchodzący w skład pakietu ATP.
Rys. 2. Wyznaczanie parametrów maszyny 13 kW; rys. B. Karolewski
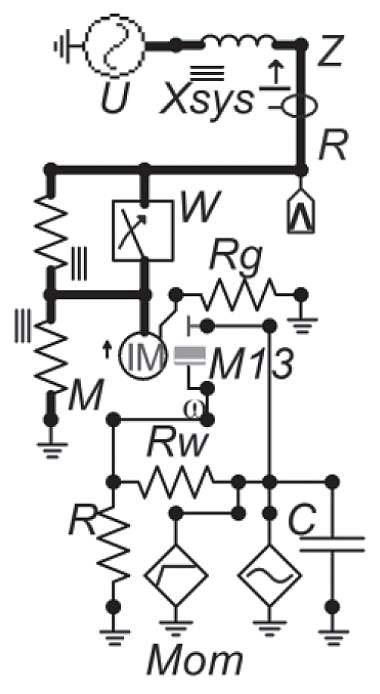
Rys. 3. Model pojedynczej maszyny, w wariancie Initialization Manual; rys. B. Karolewski
Zdarzają się kłopoty z zainstalowaniem tego programu. Wtedy można się posłużyć alternatywnym kalkulatorem, który nosi nazwę motdatpr.exe i jest za darmo dostępny w internecie. Wartości parametrów dla przykładowego jednoklatkowego silnika o mocy 13 kW przedstawiono na rys. 2.
Równanie ruchu silnika modeluje się za pomocą równoważnego obwodu elektrycznego. Napięcie w tym obwodzie reprezentuje prędkość kątową w (rys. 1.).
Moment modeluje się, wprowadzając źródło wymuszające prąd (Mom na rys. 3), którego wartość w A odpowiada momentowi w Nm. Dla badanego silnika przyjęto –124 A jako odwzorowanie znamionowego momentu obciążenia lub +124 A jako odwzorowanie znamionowego momentu napędowego przy pracy generatorowej. Typowe źródło prądu stałego umożliwia zamodelowanie liniowych zmian momentu przez podanie czasu jego narastania T_ramp. Moment elektromagnetyczny silnika traktowany jest w ATP jako ujemny. Jego znak na wykresie przebiegów wynikowych można zmienić, wprowadzając w programie PlotXY współczynnik skali -1.
Założono, że rezystor odwzorowujący tłumienie mechaniczne ma wartość R = 100 W (rys. 3). Natomiast pojemność C zastępuje moment bezwładności. W przypadku przyjęcia w ustawieniach ATP/Settings/Simulation wskaźników Xopt = Copt = 50, bezwładność modeluje się podając susceptancję w mS. Dla badanego silnika J = 1,6 kgm2, czyli pojemność C = 1,6 F, a susceptancja 1/Xc = w·C = 314·1,6 » 500 S·=·5·108 mS.
Model maszyny z ręcznym podawaniem warunków początkowych (manual)
Model zbudowany w edytorze AtpDraw przedstawiono na rys. 3. W ustawieniach ATP/Settings/Switch/UM przyjęto Initialization Manual, jednostki (Units) Si oraz metodę całkowania (Interface) Compensation. Rezystor M uziemiający obwód silnika (wymagany ze względu na stabilność obliczeń) przyjęto na poziomie 100 kW.
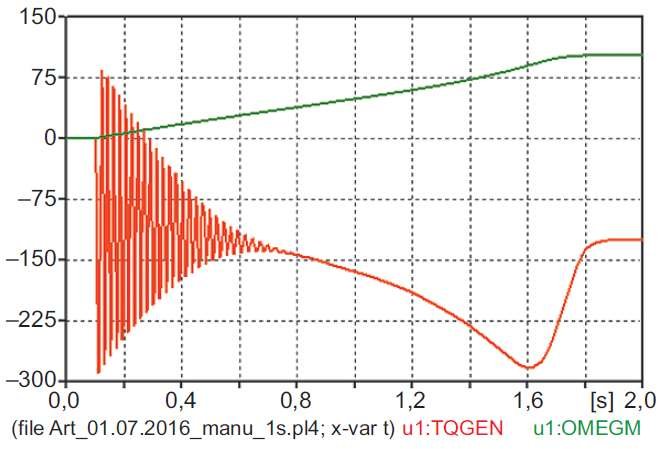
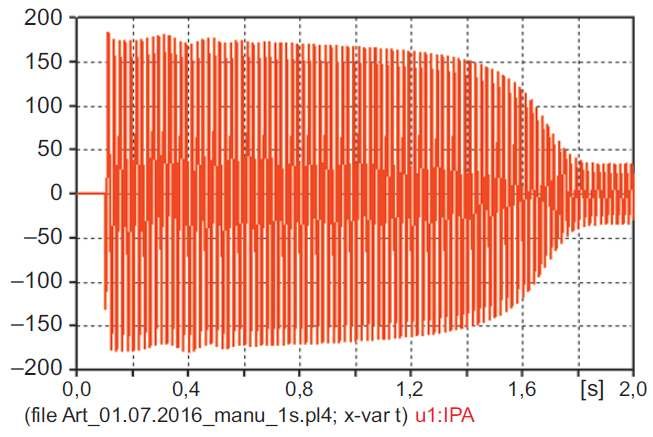
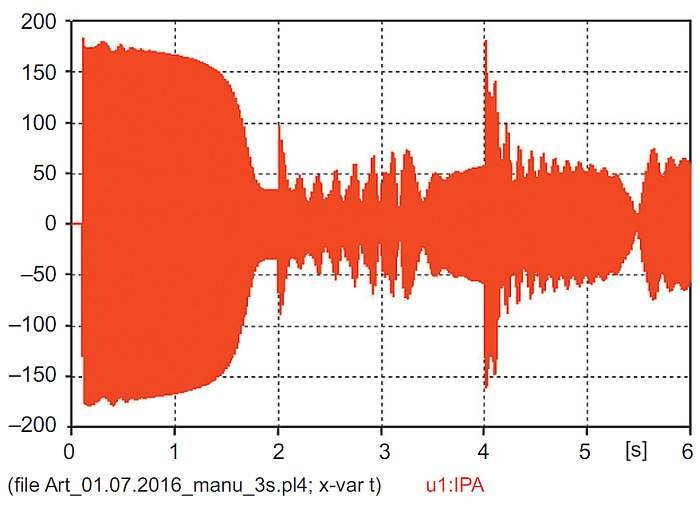
Przykładowe przebiegi rozruchowe silnika 13 kW przy narastaniu momentu obciążenia od zera do wartości znamionowej w czasie od 0,1 s do 1,5 s, przedstawiono na rys. 4. i rys. 5.
Rys. 4. Przebiegi rozruchowe momentu i prędkości silnika 13 kW uzyskane z modelu „manual”; rys. B. Karolewski
Moment ustalony wynosi –125 (znamionowy 124), krotność momentu maksymalnego 2,27 (znamionowa 2,1), prędkość ustalona 102,2 rad/s – czyli 976 obr./min (znamionowa 975), amplituda prądu 34,2, czyli wartość skuteczna 24,2 A (znamionowy 25), krotność prądu rozruchowego 5,2 (znamionowa 5,1). Odchyłki wyliczonych wartości w stosunku do znamionowych są niewielkie – model zachowuje się poprawnie. Nie jest zachowana krotność momentu rozruchowego, która powinna wynosić 1,6, a jest znacznie mniejsza.
Rys. 5. Przebieg rozruchowy wartości chwilowych prądu fazy A silnika 13 kW uzyskanych z modelu „manual”; rys. B. Karolewski
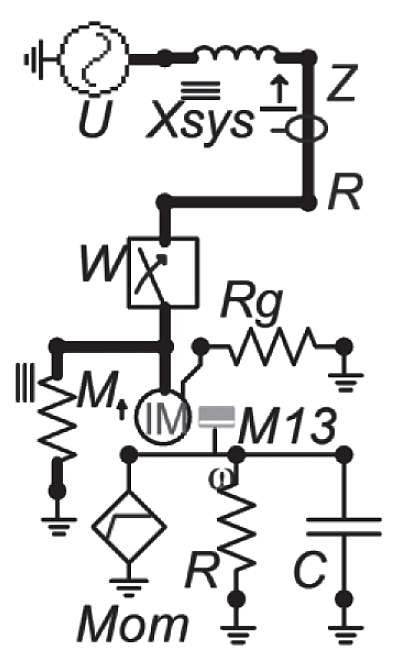
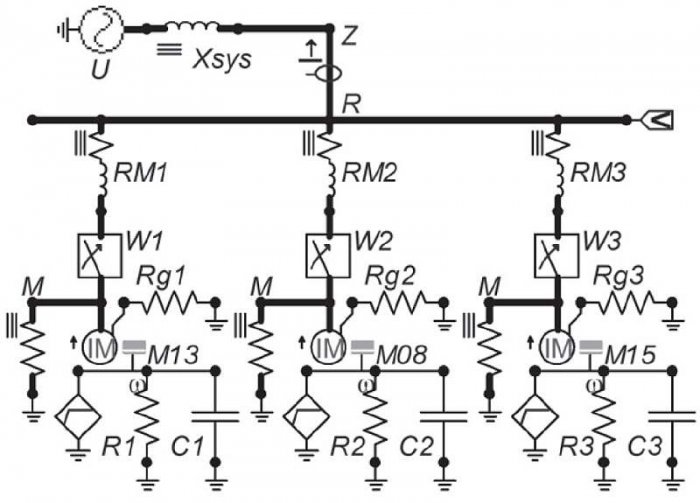
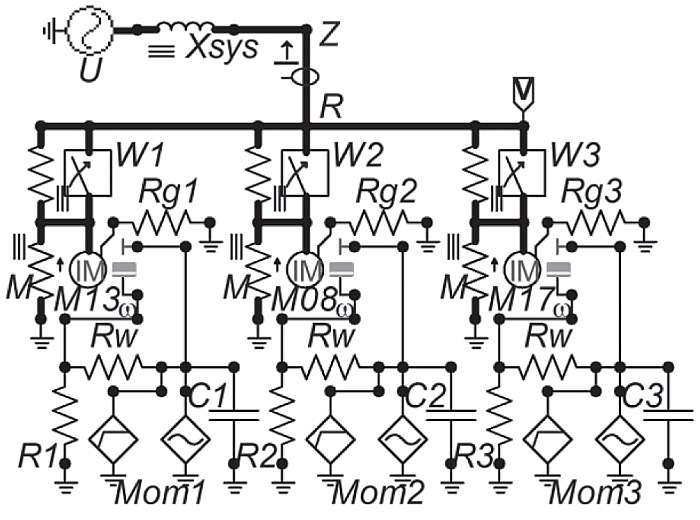
Rys. 6. Model 3 maszyn w wariancie Initialization Manual; rys. B. Karolewski
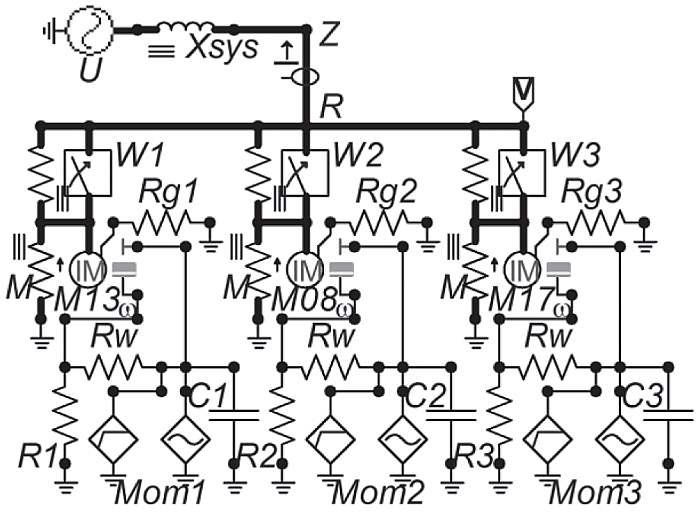
Modelowanie 3 maszyn z ręcznym podawaniem warunków początkowych (manual)
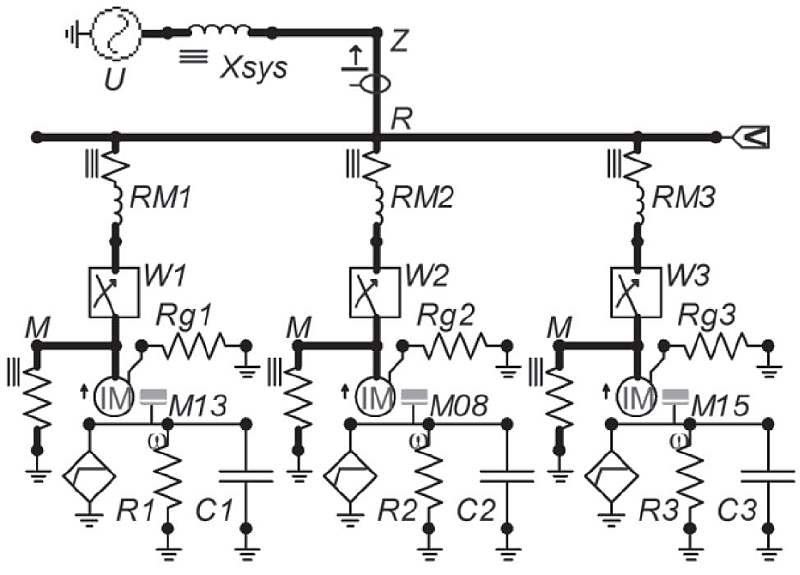
Aby badać współpracę 3 maszyn, zasilanych ze wspólnej rozdzielni, zbudowano model przedstawiony na rys 6.
Silniki o mocach 13, 8 i 15 kW są uruchamiane kolejno w chwilach 0,1, 2 i 4 s. W obwód zasilania każdego z silników włączono szeregowo impedancje RM = (0,0005 + j0,0001) W. Ich wartości są tak małe, aby spadki napięcia na tych impedancjach były pomijalne, a rozdzielają one elektrycznie poszczególne maszyny.
Reaktancję źródła przyjęto Xsys = 0,0001 W. W takich warunkach wyniki obliczeń na pierwszy rzut oka wydają się poprawne.
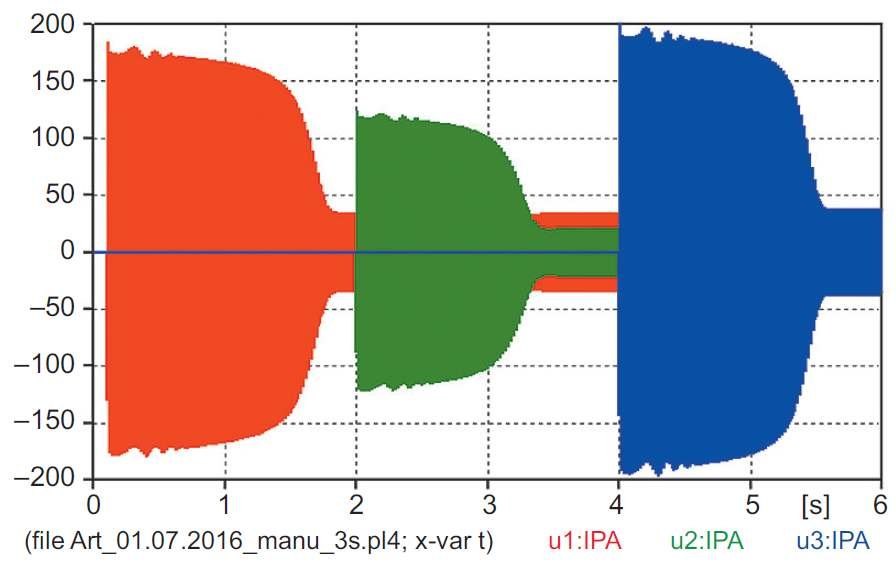
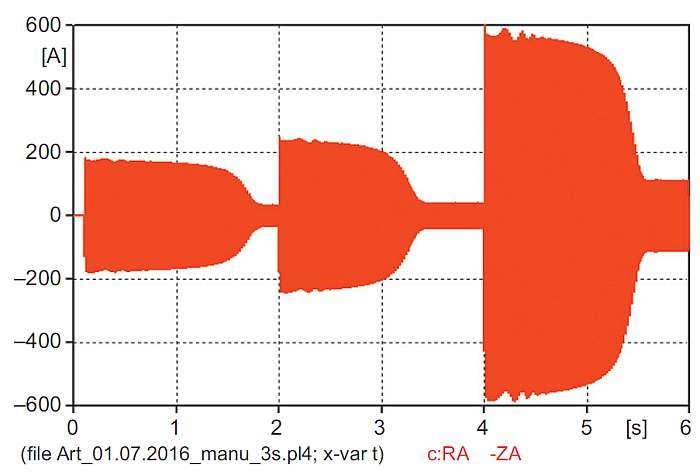
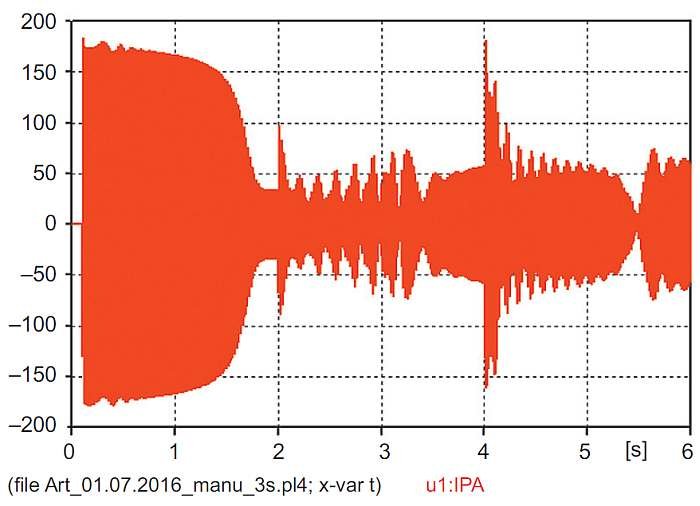
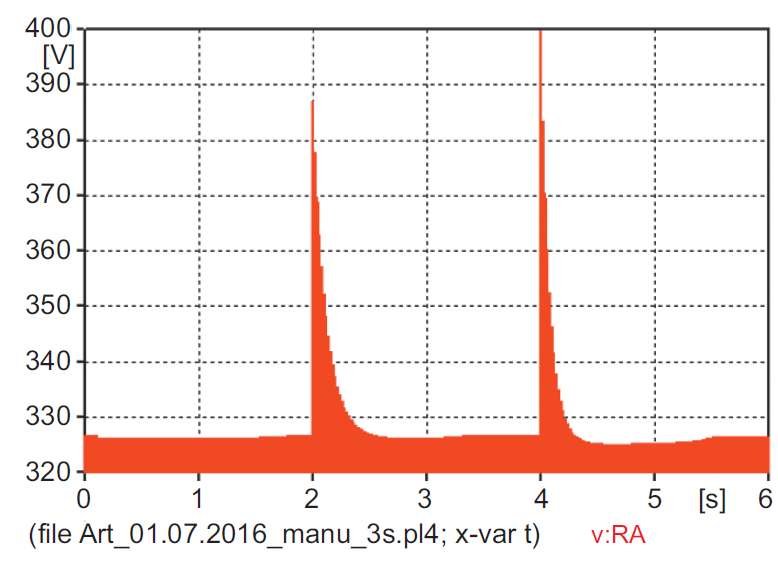
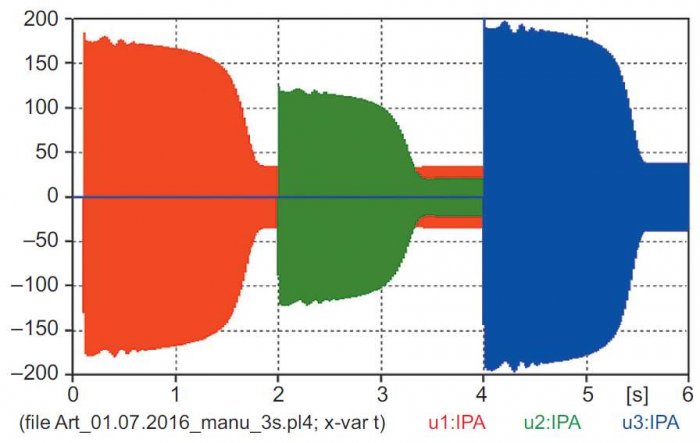
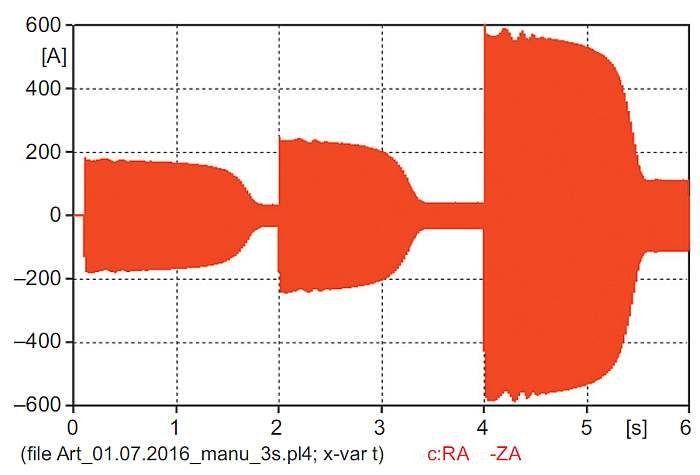
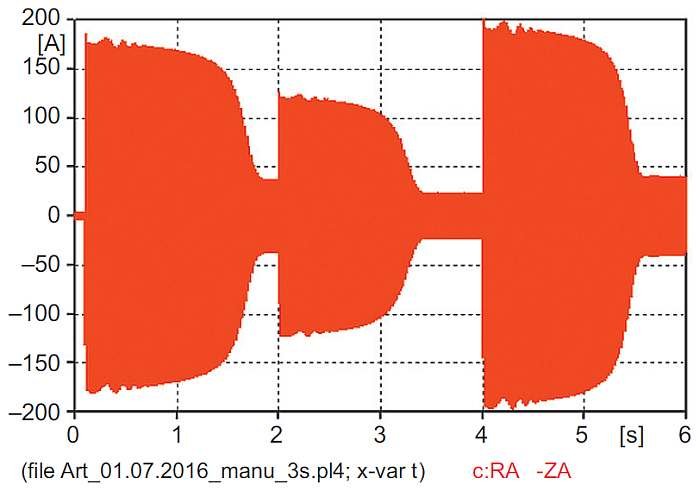
Na rys. 7. przedstawiono prądy wszystkich silników, a na rys. 8. prąd dopływający ze źródła, który powinien być sumą prądów silników. Jednak po dokładniejszej analizie widać, że prąd ze źródła nie jest równy sumie prądów silników.
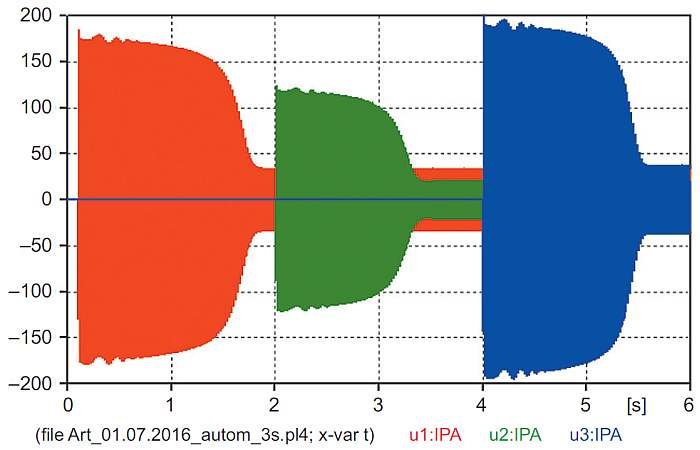
Rys. 7. Przebiegi rozruchowe wartości chwilowych prądów fazy A 3 silników uzyskanych z modelu „manual”; rys. B. Karolewski
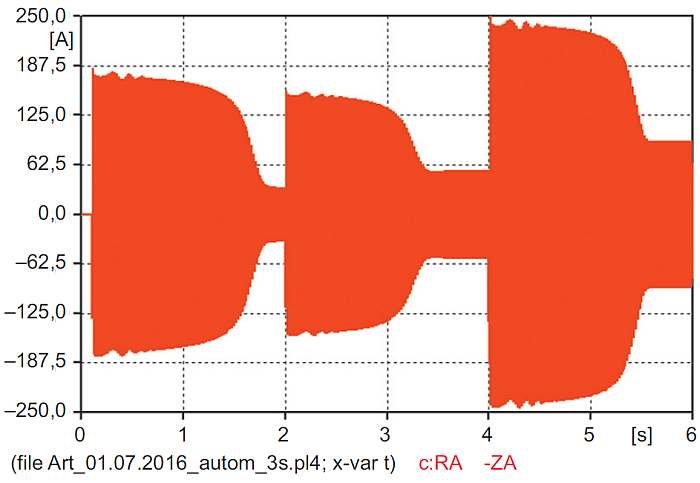
Rys. 8. Przebieg wartości chwilowej prądu dopływającego ze źródła uzyskany z modelu „manual”; rys. B. Karolewski
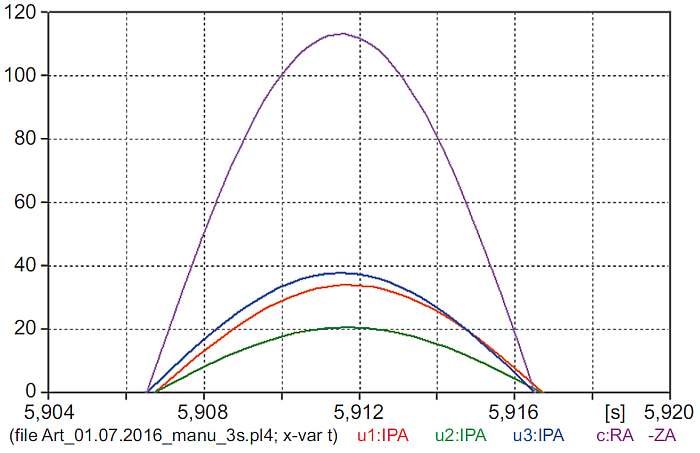
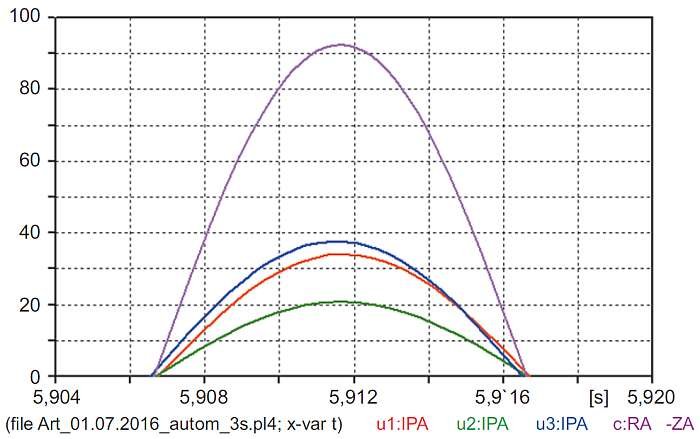
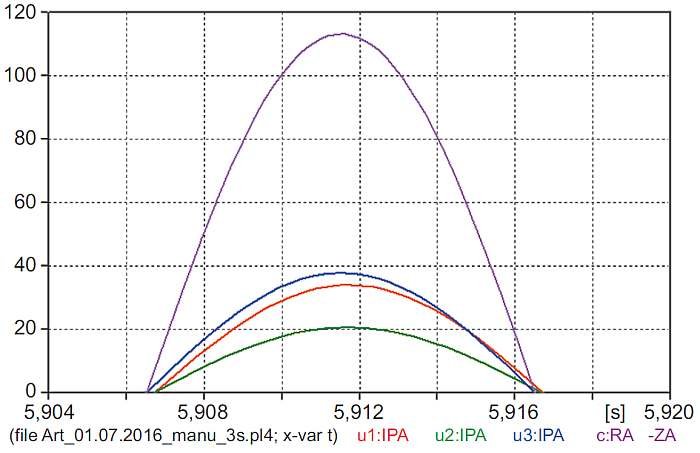
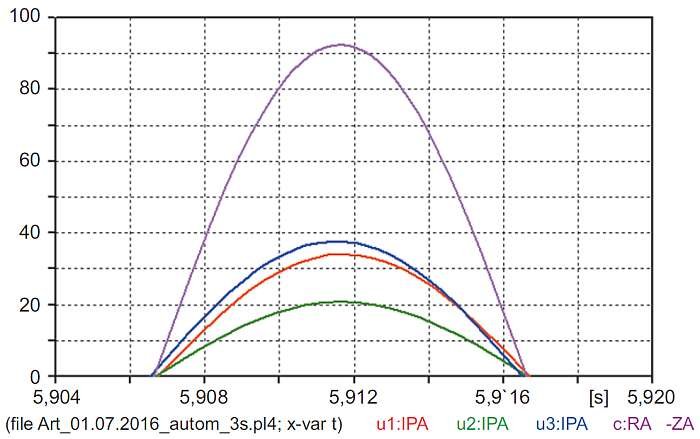
Na rys. 9. pokazano poszczególne prądy w stanie ustalonym. Amplitudy prądów kolejnych silników wynoszą 34,0 (wartość skuteczna 24), 20,5 i 37,7 A. Przesunięcia fazy tych prądów są pomijalnie małe. Suma prądów wynosi 92,2 A. Natomiast prąd dopływający ze źródła ma amplitudę 113,1 A. Jak widać, między maszynami występują jakieś wzajemne oddziaływania powodujące, że w modelu nie jest zachowane prawo Kirchoffa.
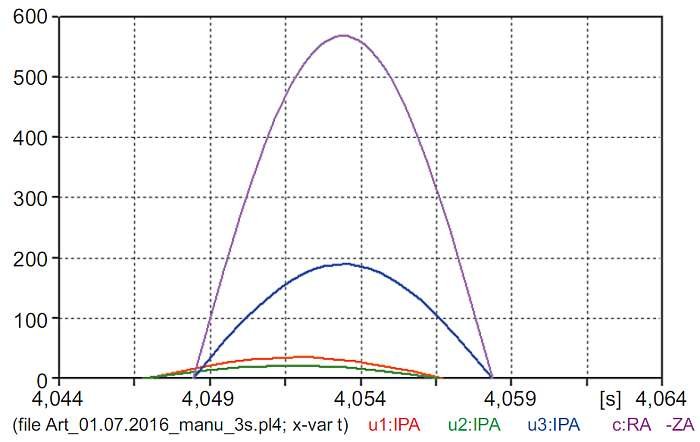
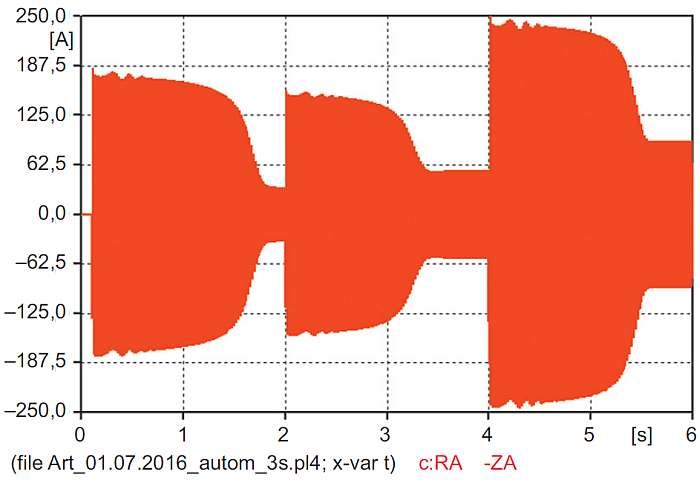
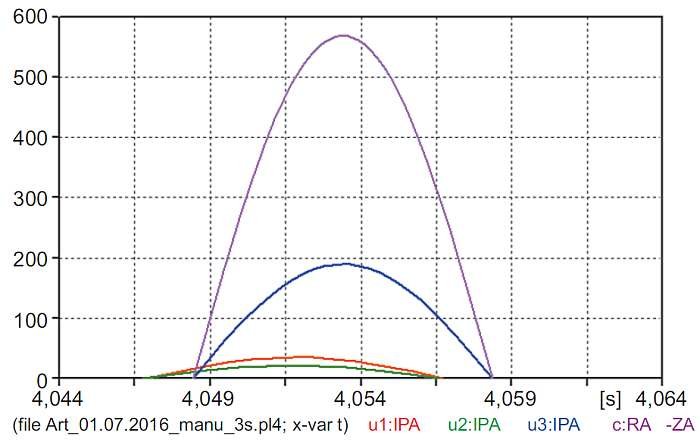
Jeszcze większe różnice wystąpiły zaraz po uruchomieniu trzeciego silnika (patrz rys. 10.). Dla chwili 4,054 s amplitudy prądów wynoszą 26,7, 15,9 oraz 185,7. Suma tych prądów wynosi 228,3 A. Natomiast amplituda prądu ze źródła to 557,1 A.
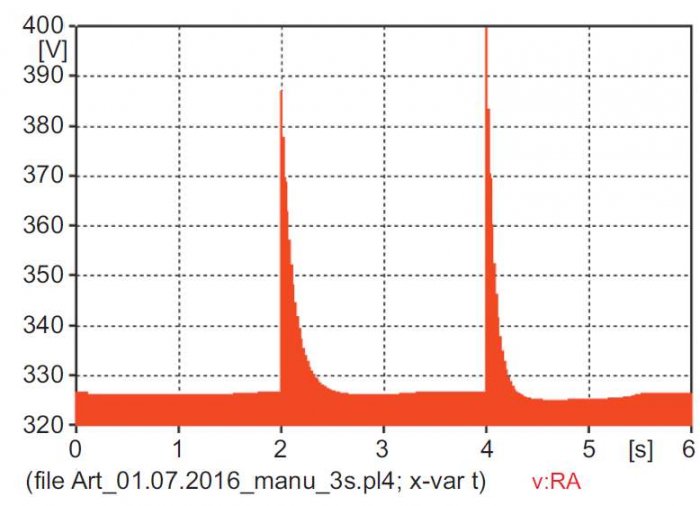
Nieprawidłowości zachowania modelu narastają przy innych niż dobrane wartościach parametrów. Przykładowo wzrost reaktancji źródła do wartości Xsys = 0,0033 W powoduje występowanie nadmiernych zmian prądu 1 silnika przy załączaniu kolejnych maszyn (patrz rys. 11.). Przebieg zmian napięcia w rozdzielni zasilającej dla tego przypadku ilustruje rys. 12. Dalsze nieznaczne powiększenie wartości Xsys powoduje wystąpienie kolejnej nieprawidłowości – zanik prądu silnika do wartości bliskiej zero.
Inne nieprawidłowości pojawiają się po wyeliminowaniu z modelu impedancji RM. Prąd dopływający ze źródła (rys. 13.) ma 3 człony o wartościach zbliżonych do prądów poszczególnych silników (rys. 7.), a nie ich sumy.
Model maszyny z automatycznym obliczaniem warunków początkowych (automatic)
Schemat modelu pojedynczej maszyny przedstawiono na rys. 14. W modelu tym występuje kilka dodatkowych elementów. Zgodnie z zaleceniami podanymi w [3], w celu umożliwienia wyznaczenia warunków początkowych równań, maszyna nie powinna być załączana w chwili rozpoczynania obliczeń, tylko z pewnym opóźnieniem (przyjęto 0,1 s). Ponadto trzeba wprowadzić dodatkowy rezystor bocznikujący wyłącznik (przyjęto tyle samo co M, czyli 105 W). Kolejne zalecenie dotyczy wprowadzenia do wirnika dodatkowego źródła prądu zmiennego. Aby nie wpływało ono na wartości momentu, przyjęto amplitudę prądu tego źródła na poziomie 10–6 A, a częstotliwość 100 Hz. Ostatni warunek to połączenie obu wejść obwodu wirnika rezystorem o pomijalnie małej wartości – przyjęto Rw = 10–6 W.
Przebiegi rozruchowe uzyskane za pomocą opisanego modelu są praktycznie identyczne jak z modelu w wersji „manual”, przedstawionego na rys. 4. i rys. 5.
Rys. 9. Porównanie amplitud ustalonych prądów silników i prądu dopływającego ze źródła; rys. B. Karolewski
Rys. 10. Porównanie amplitud prądów silników i prądu dopływającego ze źródła w chwili 4,054 s; rys. B. Karolewski
Rys. 11. Przebieg rozruchowy wartości chwilowych prądu fazy A silnika 13 kW uzyskanych z modelu „manual” po zwiększeniu wartości Xsys; rys. B. Karolewski
Rys. 12. Przebieg rozruchowy wartości chwilowych napięcia fazowego w rozdzielni zasilającej silniki uzyskanych z modelu „manual” po zwiększeniu wartości Xsys; rys. B. Karolewski
Rys. 13. Przebieg wartości chwilowej prądu dopływającego ze źródła uzyskany z modelu „manual” po usunięciu RM; rys. B. Karolewski
Rys. 14. Model pojedynczej maszyny w wariancie Initialization Automatic; rys. B. Karolewski
Modelowanie 3 maszyn z automatycznym wyliczaniem warunków początkowych (automatic)
Model układu 3 maszyn w wersji „automatic” przedstawiono na rys. 15.
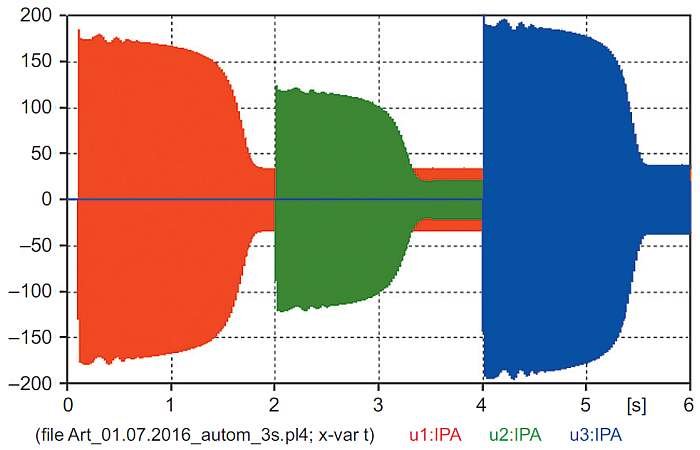
Okazało się, że aby model zachowywał się poprawnie, konieczna była zmiana metody całkowania równań na Prediction. Bez tego równania traciły stabilność. Przykładowe wyniki przedstawiono na rys. 16., rys. 17. i rys.18. Wyniki te są poprawne.
Amplitudy prądów silników w stanie ustalonym (rys. 18.) wynoszą 34,1, 20,8, i 37,6 A, co w sumie daje 92,5 A i jest zgodne z amplitudą prądu dopływającego ze źródła.
Rys. 15. Model 3 maszyn w wariancie Initialization Automatic; rys. B. Karolewski
Modelowanie 3 generatorów z automatycznym wyliczaniem warunków początkowych (automatic)
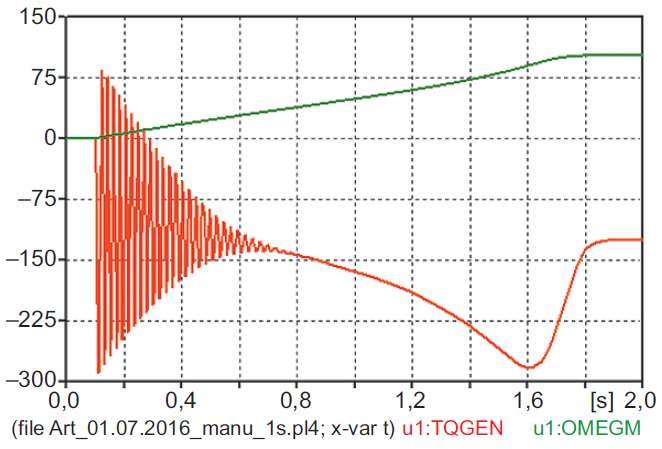
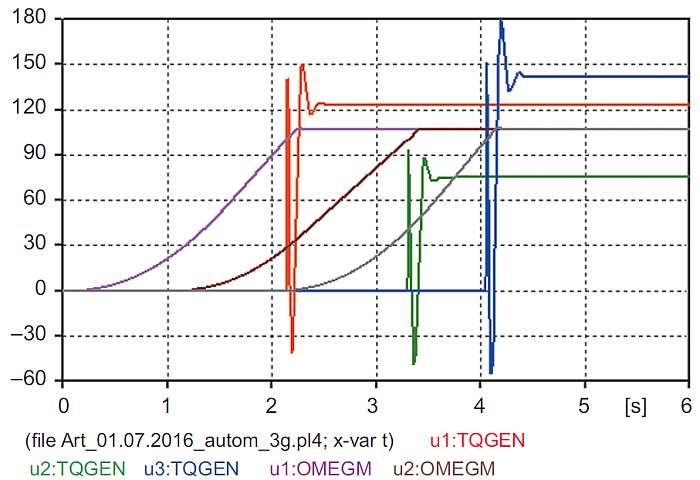
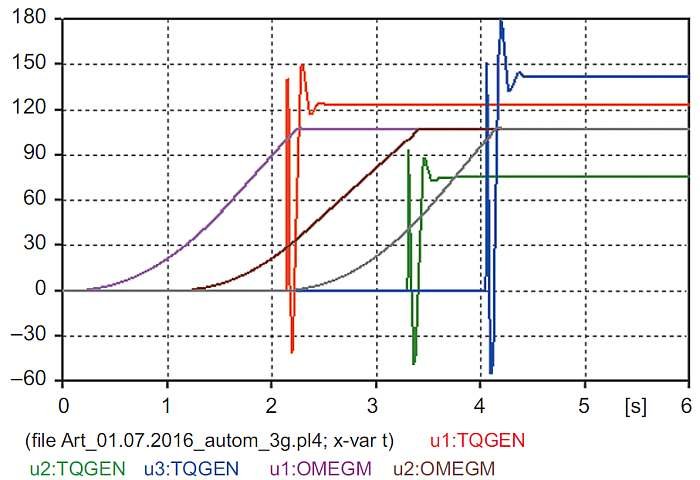
W kolejnym wariancie obliczeń zamodelowano kolejne rozkręcanie wyłączonych maszyn przez turbiny do prędkości podsynchronicznej rzędu 100 rad/s i załączanie maszyn, które przechodzą do pracy generatorowej. Wymagało to zmiany znaku momentów napędowych. Przykładowe przebiegi zmian prędkości i momentów elektromagnetycznych silników przedstawiono na rys. 19.
Rys. 16. Przebiegi rozruchowe wartości chwilowych prądów fazy A 3 silników uzyskanych z modelu „automatic”; rys. B. Karolewski
Rys. 17. Przebieg wartości chwilowej prądu dopływającego ze źródła uzyskany z modelu „automatic”; rys. B. Karolewski
Rys. 18. Porównanie amplitudy ustalonych prądów silników i prądu dopływającego ze źródła; rys. B. Karolewski
Rys. 19. Przebiegi prędkości i momentów elektromagnetycznych podczas rozkręcania maszyn i przejścia do pracy generatorowej; rys. B. Karolewski
Podsumowanie
W przypadku modelowania pojedynczej maszyny indukcyjnej można się posługiwać zarówno modelem z ręcznym, jak i automatycznym wyznaczaniem warunków początkowych. Jednakże w przypadku analizowania pracy grupy 2 lub 3 maszyn, tylko model „automatic” z całkowaniem metodą prediction dawał poprawne wyniki.
Modelowanie grupy maszyn wymaga wnikliwej analizy uzyskanych rezultatów i oceny poprawności zachowania modelu pod kątem logicznej spójności wyników i zachowania podstawowych praw elektrotechniki.
Literatura
Prikler R, Hoidalen H: ATPDRAW version 5.6 for Windows 9x/NT/2000/XP/Vista, Users’ manual. Norwey, November 2009
Rosołowski E, Wieczorek M: Modelowanie silnika indukcyjnego w programie ATP - EMTP. Mat. VI Konf. Nauk. – Techn. Sieci Elektroenergetyczne w Przemyśle i Energetyce – SIECI 2008
Rosołowski E: Komputerowe metody analizy elektromagnetycznych stanów przejściowych. Oficyna Wyd. Politechniki Wrocławskiej, Wrocław 2009
Uracz P, Karolewski B: Modelowanie stanów przejściowych w sieciach energetycznych z wykorzystaniem programu ATP/EMTP. Pr. Nauk. Inst. Masz, Nap. i Pom. El. PWr 2005, nr 58, Studia i Materiały nr 25
Wiater J: Kurs praktycznego wykorzystania programu ATP – EMTP (część 9). Silniki asynchroniczne 3-fazowe. Elektro.info 2008, nr 3
Rys. 1. Symbole graficzne modelu silnika indukcyjnego w programie AtpDraw v. 5.8
Rys. 2. Wyznaczanie parametrów maszyny 13 kW
Rys. 3. Model pojedynczej maszyny, w wariancie Initialization Manual
Rys. 4. Przebiegi rozruchowe momentu i prędkości silnika 13 kW uzyskane z modelu „manual”
Rys. 5. Przebieg rozruchowy wartości chwilowych prądu fazy A silnika 13 kW uzyskanych z modelu „manual”
Rys. 6. Model 3 maszyn w wariancie Initialization Manual
Rys. 7. Przebiegi rozruchowe wartości chwilowych prądów fazy A 3 silników uzyskanych z modelu „manual”
Rys. 8. Przebieg wartości chwilowej prądu dopływającego ze źródła uzyskany z modelu „manual”
Rys. 9. Porównanie amplitud ustalonych prądów silników i prądu dopływającego ze źródła
Rys. 10. Porównanie amplitud prądów silników i prądu dopływającego ze źródła w chwili 4,054 s
Rys. 11. Przebieg rozruchowy wartości chwilowych prądu fazy A silnika 13 kW uzyskanych z modelu „manual” po zwiększeniu wartości Xsys
Rys. 12. Przebieg rozruchowy wartości chwilowych napięcia fazowego w rozdzielni zasilającej silniki uzyskanych z modelu „manual” po zwiększeniu wartości Xsys
Rys. 13. Przebieg wartości chwilowej prądu dopływającego ze źródła uzyskany z modelu „manual” po usunięciu RM
Rys. 14. Model pojedynczej maszyny w wariancie Initialization Automatic
Rys. 15. Model 3 maszyn w wariancie Initialization Automatic
Rys. 16. Przebiegi rozruchowe wartości chwilowych prądów fazy A 3 silników uzyskanych z modelu „automatic”
Rys. 17. Przebieg wartości chwilowej prądu dopływającego ze źródła uzyskany z modelu „automatic”
Rys. 18. Porównanie amplitudy ustalonych prądów silników i prądu dopływającego ze źródła
Rys. 19. Przebiegi prędkości i momentów elektromagnetycznych podczas rozkręcania maszyn i przejścia do pracy generatorowej; rys. B. Karolewski
Odnawialne źródła energii (OZE) odgrywają kluczową rolę w globalnych wysiłkach na rzecz zrównoważonego rozwoju i redukcji emisji gazów cieplarnianych. Jednym z wyzwań związanych z efektywnym wykorzystaniem...
Odnawialne źródła energii (OZE) odgrywają kluczową rolę w globalnych wysiłkach na rzecz zrównoważonego rozwoju i redukcji emisji gazów cieplarnianych. Jednym z wyzwań związanych z efektywnym wykorzystaniem energii ze źródeł odnawialnych jest gromadzenie i przesyłanie wyprodukowanej energii elektrycznej. W tym kontekście technologia cable pooling zyskuje na znaczeniu, umożliwiając zoptymalizowane zarządzanie przesyłem energii elektrycznej ze źródeł OZE.
Fronius zapewnia optymalne bezpieczeństwo i wysoki stopień zużycia energii na potrzeby własne w produkcji energii słonecznej – wszystko dzięki wysokiej jakości falownikom, do których dołącza teraz Fronius...
Fronius zapewnia optymalne bezpieczeństwo i wysoki stopień zużycia energii na potrzeby własne w produkcji energii słonecznej – wszystko dzięki wysokiej jakości falownikom, do których dołącza teraz Fronius GEN24.
Nowoczesne technologie doprowadziły do wyraźnej transformacji sektora budownictwa, szczególnie w kwestii poprawy efektywności energetycznej. W dobie rosnącej świadomości ekologicznej i zmian klimatycznych...
Nowoczesne technologie doprowadziły do wyraźnej transformacji sektora budownictwa, szczególnie w kwestii poprawy efektywności energetycznej. W dobie rosnącej świadomości ekologicznej i zmian klimatycznych optymalizacja zużycia energii staje się priorytetem. Jednym z ważniejszych kroków prowadzących do obniżenia klasy energetycznej budynków jest wprowadzenie świadectwa energetycznego i nowoczesnych instalacji elektrycznych.
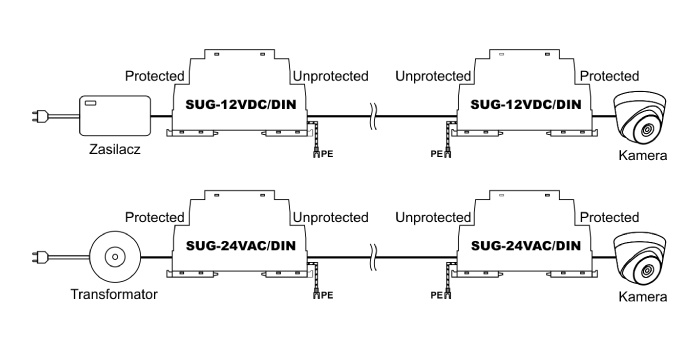
Już wkrótce gama produktów z firmy Ewimar, zostanie wzbogacona o nowe produkty ochrony przeciwprzepięciowej, dedykowane do linii zasilających, linii pomiarowych oraz transmisyjnych.
Już wkrótce gama produktów z firmy Ewimar, zostanie wzbogacona o nowe produkty ochrony przeciwprzepięciowej, dedykowane do linii zasilających, linii pomiarowych oraz transmisyjnych.
Firma CSI S.A. poszerza ofertę komputerów Mini PC o nowy produkt z serii PICO-SEMI od AAEON. Komputer PICO-EHL4-SEMI jest dostępny w dwóch wersjach procesorowych: Intel® Celeron® J6412 o mocy 10 W i Intel®...
Firma CSI S.A. poszerza ofertę komputerów Mini PC o nowy produkt z serii PICO-SEMI od AAEON. Komputer PICO-EHL4-SEMI jest dostępny w dwóch wersjach procesorowych: Intel® Celeron® J6412 o mocy 10 W i Intel® Celeron® N6210 o mocy 6,5 W.
Chcesz zwiększyć wydajność swojej instalacji fotowoltaicznej? Pomyśl o inwerterach hybrydowych. Dowiedz się, czym są te urządzenia, jakie korzyści płyną z ich wykorzystania i dlaczego to właśnie one są...
Chcesz zwiększyć wydajność swojej instalacji fotowoltaicznej? Pomyśl o inwerterach hybrydowych. Dowiedz się, czym są te urządzenia, jakie korzyści płyną z ich wykorzystania i dlaczego to właśnie one są przyszłością zrównoważonej energetyki.
Elektroklub jest programem partnerskim dla klientów wybranych hurtowni elektrotechnicznych, który powstał we współpracy z trzema producentami z tej branży: Philips, NKT i Schneider Electric. Obecnie trwa...
Elektroklub jest programem partnerskim dla klientów wybranych hurtowni elektrotechnicznych, który powstał we współpracy z trzema producentami z tej branży: Philips, NKT i Schneider Electric. Obecnie trwa w nim wiosenna promocja, w której można wygrać supernagrody!
Wyładowania atmosferyczne jako nieodłączny element burz stanowią poważne zagrożenie dla ludzi oraz infrastruktury. Aby zminimalizować ryzyko strat spowodowanych przez wyładowania atmosferyczne, można skutecznie...
Wyładowania atmosferyczne jako nieodłączny element burz stanowią poważne zagrożenie dla ludzi oraz infrastruktury. Aby zminimalizować ryzyko strat spowodowanych przez wyładowania atmosferyczne, można skutecznie zabezpieczać wszelkiego rodzaju obiekty, projektując i montując instalację odgromową zgodną z obowiązującymi przepisami.
W związku z dynamicznym rozwojem farm fotowoltaicznych rośnie zapotrzebowanie na prawidłowe pomiary impedancji pętli zwarcia na odcinku inwerter-transformator nn/SN. Z pomocą przychodzi Sonel MZC-340-PV...
W związku z dynamicznym rozwojem farm fotowoltaicznych rośnie zapotrzebowanie na prawidłowe pomiary impedancji pętli zwarcia na odcinku inwerter-transformator nn/SN. Z pomocą przychodzi Sonel MZC-340-PV – pierwszy na świecie miernik przeznaczony do pomiarów impedancji pętli zwarcia w sieciach o napięciach dochodzących aż do 900 V AC, z kategorią pomiarową CAT IV 1000 V.
Aby przeciwdziałać negatywnym skutkom wyższych harmonicznych, można wykorzystać różne rozwiązania. Uzależnione są one od takich czynników jak: moc zapotrzebowana w zakładzie, sztywność sieci zasilającej,...
Aby przeciwdziałać negatywnym skutkom wyższych harmonicznych, można wykorzystać różne rozwiązania. Uzależnione są one od takich czynników jak: moc zapotrzebowana w zakładzie, sztywność sieci zasilającej, moc odbiorników czy budowa samej instalacji elektroenergetycznej. Dobór konkretnego rozwiązania powinien opierać się na analizie układu zasilającego zakład, reżimu pracy i zainstalowanych odbiorników. Bardzo ważnym punktem doboru jest wykonanie pomiarów Jakości Energii Elektrycznej i ich prawidłowa...
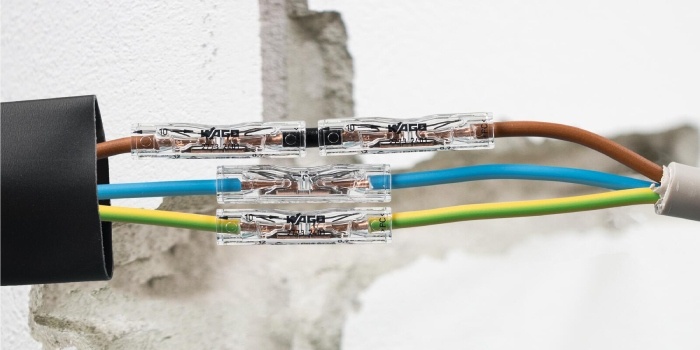
Dzięki takim złączkom od firmy WAGO ELWAG naprawienie lub przedłużenie przewodu jest tak proste jak nigdy dotąd! Za ich pomocą można nawet w najmniejszych przestrzeniach – szybko i bez użycia narzędzi...
Dzięki takim złączkom od firmy WAGO ELWAG naprawienie lub przedłużenie przewodu jest tak proste jak nigdy dotąd! Za ich pomocą można nawet w najmniejszych przestrzeniach – szybko i bez użycia narzędzi – połączyć przewody o przekroju od 0,75 do 4 mm kw. Wystarczy po prostu odizolować końcówkę przewodu i bez użycia jakichkolwiek narzędzi wsunąć ją do złączki – i bezpieczne połączenie gotowe.
Na początku 2024 roku firma BayWa r.e. Solar Systems zrobiła kolejny duży krok w rozwoju działalności na polskim rynku, otwierając nowy magazyn w Gdańsku. Jego powierzchnia to
25 000 m kw., co łącznie...
Na początku 2024 roku firma BayWa r.e. Solar Systems zrobiła kolejny duży krok w rozwoju działalności na polskim rynku, otwierając nowy magazyn w Gdańsku. Jego powierzchnia to
25 000 m kw., co łącznie daje ponad 45 tys. m kw. powierzchni magazynowej BayWa r.e. Solar Systems w Polsce.
Kompatybilność elektromagnetyczna kabli elektrycznych jest kluczowym parametrem, który charakteryzuje sposób stosowania i użytkowania danych kabli do wzajemnej współpracy kilku urządzeń elektrycznych zestawionych...
Kompatybilność elektromagnetyczna kabli elektrycznych jest kluczowym parametrem, który charakteryzuje sposób stosowania i użytkowania danych kabli do wzajemnej współpracy kilku urządzeń elektrycznych zestawionych w całość. Prawidłowe funkcjonowanie urządzeń może być zapewnione tylko i wyłącznie wtedy, gdy zakłócenia generowane przez otoczenie będą skutecznie blokowane. Generowane spodziewane zakłócenia elektromagnetyczne przez wyposażenie otaczające kable muszą zatem być w odpowiedni sposób odseparowane.
Konstruktorzy szaf sterowniczych stoją przed wieloma wyzwaniami: począwszy od międzynarodowej presji konkurencyjnej i niedoboru wykwalifikowanych pracowników, po rosnące koszty pracy i materiałów. Stosunkowo...
Konstruktorzy szaf sterowniczych stoją przed wieloma wyzwaniami: począwszy od międzynarodowej presji konkurencyjnej i niedoboru wykwalifikowanych pracowników, po rosnące koszty pracy i materiałów. Stosunkowo niewiele można zrobić, aby wpłynąć na te aspekty, dlatego coraz częściej w centrum uwagi znajduje się produkcja własna ze wszystkimi procesami i strukturami, a także ogólna struktura kosztów.
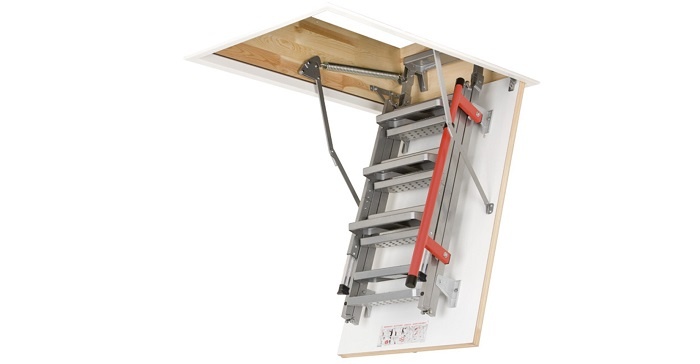
Składane schody prowadzące na strych są popularną alternatywą dla tradycyjnych schodów, które zazwyczaj zajmują bardzo dużo miejsca. W jakie konstrukcje warto zainwestować? Czym się charakteryzują?
Składane schody prowadzące na strych są popularną alternatywą dla tradycyjnych schodów, które zazwyczaj zajmują bardzo dużo miejsca. W jakie konstrukcje warto zainwestować? Czym się charakteryzują?
Zakończono półtoraroczny projekt termomodernizacji w Sanktuarium Matki Bożej Bolesnej, Pani Ziemi Świętokrzyskiej, zlokalizowanym w Kałkowie-Godowie. Obecnie zarówno duchowni, jak i pielgrzymi odwiedzający...
Zakończono półtoraroczny projekt termomodernizacji w Sanktuarium Matki Bożej Bolesnej, Pani Ziemi Świętokrzyskiej, zlokalizowanym w Kałkowie-Godowie. Obecnie zarówno duchowni, jak i pielgrzymi odwiedzający to miejsce, mają dostęp do zaawansowanego technologicznie systemu grzewczego.
Klimatyzatory ścienne split to idealne rozwiązanie do chłodzenia wnętrz zarówno w domach, jak i mieszkaniach. Umożliwiają efektywną regulację temperatury, zapewniając komfort nawet w najgorętsze dni.
Klimatyzatory ścienne split to idealne rozwiązanie do chłodzenia wnętrz zarówno w domach, jak i mieszkaniach. Umożliwiają efektywną regulację temperatury, zapewniając komfort nawet w najgorętsze dni.
Zapewnienie właściwej jakości energii elektrycznej, w tym brak przerw w dostawie energii oraz opłat za ponadumowny pobór energii elektrycznej, należą do zadań służb energetycznych w zakładzie przemysłowym....
Zapewnienie właściwej jakości energii elektrycznej, w tym brak przerw w dostawie energii oraz opłat za ponadumowny pobór energii elektrycznej, należą do zadań służb energetycznych w zakładzie przemysłowym. Aby móc wypełnić wskazane zadania, niezbędne są rzetelne dane o parametrach jakości energii elektrycznej. W tym celu można stosować stacjonarne analizatory jakości energii elektrycznej firmy A-Eberle typu PQI-DA Smart.
Zestawienie norm zawiera wybrane Polskie Normy dotyczące napędów i sterowania oraz elektroniki przemysłowej, które zostały ogłoszone przez Polski Komitet Normalizacyjny oraz na podstawie informacji normalizacyjnych...
Zestawienie norm zawiera wybrane Polskie Normy dotyczące napędów i sterowania oraz elektroniki przemysłowej, które zostały ogłoszone przez Polski Komitet Normalizacyjny oraz na podstawie informacji normalizacyjnych zamieszczonych w wersji elektronicznej miesięcznika „Wiadomości PKN – Normalizacja”.
Zestawienie norm zawiera wybrane Polskie Normy dotyczące napędów i sterowania oraz elektroniki przemysłowej, które zostały ogłoszone przez Polski Komitet Normalizacyjny oraz na podstawie informacji normalizacyjnych...
Zestawienie norm zawiera wybrane Polskie Normy dotyczące napędów i sterowania oraz elektroniki przemysłowej, które zostały ogłoszone przez Polski Komitet Normalizacyjny oraz na podstawie informacji normalizacyjnych zamieszczonych w wersji elektronicznej miesięcznika „Wiadomości PKN – Normalizacja”.
Artykuł zawiera wdrożone przy udziale autora projekty przekształtnikowych napędów jazdy roboczych maszyn górnictwa węgla brunatnego i napędów taśmy w przenośnikach taśmowych./The paper includes designs...
Artykuł zawiera wdrożone przy udziale autora projekty przekształtnikowych napędów jazdy roboczych maszyn górnictwa węgla brunatnego i napędów taśmy w przenośnikach taśmowych./The paper includes designs of converter drives for brown coal mining machinery and conveyor belt drives implemented with the author’s participation.
Zestawienie norm zawiera wybrane Polskie Normy dotyczące napędów i sterowania oraz elektroniki przemysłowej, które zostały ogłoszone przez Polski Komitet Normalizacyjny oraz na podstawie informacji normalizacyjnych...
Zestawienie norm zawiera wybrane Polskie Normy dotyczące napędów i sterowania oraz elektroniki przemysłowej, które zostały ogłoszone przez Polski Komitet Normalizacyjny oraz na podstawie informacji normalizacyjnych zamieszczonych w wersji elektronicznej miesięcznika „Wiadomości PKN – Normalizacja”.
W publikacji przedstawiany jest uproszczony projekt zasilania maszyny do obróbki drewna. Autor przywołuje podstawę opracowania i nakreśla sposób wykonania takiego projektu ubogacając go o rysunki techniczne...
W publikacji przedstawiany jest uproszczony projekt zasilania maszyny do obróbki drewna. Autor przywołuje podstawę opracowania i nakreśla sposób wykonania takiego projektu ubogacając go o rysunki techniczne i obliczenia.
Zapewnienie właściwej jakości energii elektrycznej, w tym brak przerw w dostawie energii oraz opłat za ponadumowny pobór energii elektrycznej, należą do zadań służb energetycznych w zakładzie przemysłowym....
Zapewnienie właściwej jakości energii elektrycznej, w tym brak przerw w dostawie energii oraz opłat za ponadumowny pobór energii elektrycznej, należą do zadań służb energetycznych w zakładzie przemysłowym. Aby móc wypełnić wskazane zadania, niezbędne są rzetelne dane o parametrach jakości energii elektrycznej. W tym celu można stosować stacjonarne analizatory jakości energii elektrycznej firmy A-Eberle typu PQI-DA Smart.
Klimatyzatory ścienne split to idealne rozwiązanie do chłodzenia wnętrz zarówno w domach, jak i mieszkaniach. Umożliwiają efektywną regulację temperatury, zapewniając komfort nawet w najgorętsze dni.
Klimatyzatory ścienne split to idealne rozwiązanie do chłodzenia wnętrz zarówno w domach, jak i mieszkaniach. Umożliwiają efektywną regulację temperatury, zapewniając komfort nawet w najgorętsze dni.
Zakończono półtoraroczny projekt termomodernizacji w Sanktuarium Matki Bożej Bolesnej, Pani Ziemi Świętokrzyskiej, zlokalizowanym w Kałkowie-Godowie. Obecnie zarówno duchowni, jak i pielgrzymi odwiedzający...
Zakończono półtoraroczny projekt termomodernizacji w Sanktuarium Matki Bożej Bolesnej, Pani Ziemi Świętokrzyskiej, zlokalizowanym w Kałkowie-Godowie. Obecnie zarówno duchowni, jak i pielgrzymi odwiedzający to miejsce, mają dostęp do zaawansowanego technologicznie systemu grzewczego.
Składane schody prowadzące na strych są popularną alternatywą dla tradycyjnych schodów, które zazwyczaj zajmują bardzo dużo miejsca. W jakie konstrukcje warto zainwestować? Czym się charakteryzują?
Składane schody prowadzące na strych są popularną alternatywą dla tradycyjnych schodów, które zazwyczaj zajmują bardzo dużo miejsca. W jakie konstrukcje warto zainwestować? Czym się charakteryzują?
Konstruktorzy szaf sterowniczych stoją przed wieloma wyzwaniami: począwszy od międzynarodowej presji konkurencyjnej i niedoboru wykwalifikowanych pracowników, po rosnące koszty pracy i materiałów. Stosunkowo...
Konstruktorzy szaf sterowniczych stoją przed wieloma wyzwaniami: począwszy od międzynarodowej presji konkurencyjnej i niedoboru wykwalifikowanych pracowników, po rosnące koszty pracy i materiałów. Stosunkowo niewiele można zrobić, aby wpłynąć na te aspekty, dlatego coraz częściej w centrum uwagi znajduje się produkcja własna ze wszystkimi procesami i strukturami, a także ogólna struktura kosztów.
Kompatybilność elektromagnetyczna kabli elektrycznych jest kluczowym parametrem, który charakteryzuje sposób stosowania i użytkowania danych kabli do wzajemnej współpracy kilku urządzeń elektrycznych zestawionych...
Kompatybilność elektromagnetyczna kabli elektrycznych jest kluczowym parametrem, który charakteryzuje sposób stosowania i użytkowania danych kabli do wzajemnej współpracy kilku urządzeń elektrycznych zestawionych w całość. Prawidłowe funkcjonowanie urządzeń może być zapewnione tylko i wyłącznie wtedy, gdy zakłócenia generowane przez otoczenie będą skutecznie blokowane. Generowane spodziewane zakłócenia elektromagnetyczne przez wyposażenie otaczające kable muszą zatem być w odpowiedni sposób odseparowane.
Dzięki kopii zapasowej możesz wykonać kopię całej zawartości swojego komputera. W ten sposób nie stracisz swoich plików i programów. Istnieją różne typy pamięci zewnętrznych z oddzielną funkcją tworzenia...
Dzięki kopii zapasowej możesz wykonać kopię całej zawartości swojego komputera. W ten sposób nie stracisz swoich plików i programów. Istnieją różne typy pamięci zewnętrznych z oddzielną funkcją tworzenia kopii zapasowych. Czytaj dalej i dowiedz się, który z nich może odpowiadać Twoim potrzebom!
Na początku 2024 roku firma BayWa r.e. Solar Systems zrobiła kolejny duży krok w rozwoju działalności na polskim rynku, otwierając nowy magazyn w Gdańsku. Jego powierzchnia to
25 000 m kw., co łącznie...
Na początku 2024 roku firma BayWa r.e. Solar Systems zrobiła kolejny duży krok w rozwoju działalności na polskim rynku, otwierając nowy magazyn w Gdańsku. Jego powierzchnia to
25 000 m kw., co łącznie daje ponad 45 tys. m kw. powierzchni magazynowej BayWa r.e. Solar Systems w Polsce.
Dzięki takim złączkom od firmy WAGO ELWAG naprawienie lub przedłużenie przewodu jest tak proste jak nigdy dotąd! Za ich pomocą można nawet w najmniejszych przestrzeniach – szybko i bez użycia narzędzi...
Dzięki takim złączkom od firmy WAGO ELWAG naprawienie lub przedłużenie przewodu jest tak proste jak nigdy dotąd! Za ich pomocą można nawet w najmniejszych przestrzeniach – szybko i bez użycia narzędzi – połączyć przewody o przekroju od 0,75 do 4 mm kw. Wystarczy po prostu odizolować końcówkę przewodu i bez użycia jakichkolwiek narzędzi wsunąć ją do złączki – i bezpieczne połączenie gotowe.
Aby przeciwdziałać negatywnym skutkom wyższych harmonicznych, można wykorzystać różne rozwiązania. Uzależnione są one od takich czynników jak: moc zapotrzebowana w zakładzie, sztywność sieci zasilającej,...
Aby przeciwdziałać negatywnym skutkom wyższych harmonicznych, można wykorzystać różne rozwiązania. Uzależnione są one od takich czynników jak: moc zapotrzebowana w zakładzie, sztywność sieci zasilającej, moc odbiorników czy budowa samej instalacji elektroenergetycznej. Dobór konkretnego rozwiązania powinien opierać się na analizie układu zasilającego zakład, reżimu pracy i zainstalowanych odbiorników. Bardzo ważnym punktem doboru jest wykonanie pomiarów Jakości Energii Elektrycznej i ich prawidłowa...
Magazyny energii mogą być źródłem zasilania tylko wtedy gdy są sprawne. Systemy umożliwiające pracę urządzeń w przypadku awarii zasilania są zróżnicowane od małych urządzeń UPS do baterii akumulatorów...
Magazyny energii mogą być źródłem zasilania tylko wtedy gdy są sprawne. Systemy umożliwiające pracę urządzeń w przypadku awarii zasilania są zróżnicowane od małych urządzeń UPS do baterii akumulatorów zapewniających zasilanie całych zakładów. Jest zatem sprawą kluczową, aby systemy zasilania awaryjnego same działały bez zarzutu. Bezpieczniki produkowane przez firmę SIBA zabezpieczają urządzenia, które w przypadku awarii zasilania dostarczają energię kluczowym odbiorom.
Niniejszy artykuł zawiera informacje o projektowaniu schematów elektrycznych i używaniu oprogramowania wspomagającego projektowanie w branży elektrycznej i automatyce.
Niniejszy artykuł zawiera informacje o projektowaniu schematów elektrycznych i używaniu oprogramowania wspomagającego projektowanie w branży elektrycznej i automatyce.
W związku z dynamicznym rozwojem farm fotowoltaicznych rośnie zapotrzebowanie na prawidłowe pomiary impedancji pętli zwarcia na odcinku inwerter-transformator nn/SN. Z pomocą przychodzi Sonel MZC-340-PV...
W związku z dynamicznym rozwojem farm fotowoltaicznych rośnie zapotrzebowanie na prawidłowe pomiary impedancji pętli zwarcia na odcinku inwerter-transformator nn/SN. Z pomocą przychodzi Sonel MZC-340-PV – pierwszy na świecie miernik przeznaczony do pomiarów impedancji pętli zwarcia w sieciach o napięciach dochodzących aż do 900 V AC, z kategorią pomiarową CAT IV 1000 V.
Wyładowania atmosferyczne jako nieodłączny element burz stanowią poważne zagrożenie dla ludzi oraz infrastruktury. Aby zminimalizować ryzyko strat spowodowanych przez wyładowania atmosferyczne, można skutecznie...
Wyładowania atmosferyczne jako nieodłączny element burz stanowią poważne zagrożenie dla ludzi oraz infrastruktury. Aby zminimalizować ryzyko strat spowodowanych przez wyładowania atmosferyczne, można skutecznie zabezpieczać wszelkiego rodzaju obiekty, projektując i montując instalację odgromową zgodną z obowiązującymi przepisami.
Elektroklub jest programem partnerskim dla klientów wybranych hurtowni elektrotechnicznych, który powstał we współpracy z trzema producentami z tej branży: Philips, NKT i Schneider Electric. Obecnie trwa...
Elektroklub jest programem partnerskim dla klientów wybranych hurtowni elektrotechnicznych, który powstał we współpracy z trzema producentami z tej branży: Philips, NKT i Schneider Electric. Obecnie trwa w nim wiosenna promocja, w której można wygrać supernagrody!
Chcesz zwiększyć wydajność swojej instalacji fotowoltaicznej? Pomyśl o inwerterach hybrydowych. Dowiedz się, czym są te urządzenia, jakie korzyści płyną z ich wykorzystania i dlaczego to właśnie one są...
Chcesz zwiększyć wydajność swojej instalacji fotowoltaicznej? Pomyśl o inwerterach hybrydowych. Dowiedz się, czym są te urządzenia, jakie korzyści płyną z ich wykorzystania i dlaczego to właśnie one są przyszłością zrównoważonej energetyki.
Firma CSI S.A. poszerza ofertę komputerów Mini PC o nowy produkt z serii PICO-SEMI od AAEON. Komputer PICO-EHL4-SEMI jest dostępny w dwóch wersjach procesorowych: Intel® Celeron® J6412 o mocy 10 W i Intel®...
Firma CSI S.A. poszerza ofertę komputerów Mini PC o nowy produkt z serii PICO-SEMI od AAEON. Komputer PICO-EHL4-SEMI jest dostępny w dwóch wersjach procesorowych: Intel® Celeron® J6412 o mocy 10 W i Intel® Celeron® N6210 o mocy 6,5 W.
Już wkrótce gama produktów z firmy Ewimar, zostanie wzbogacona o nowe produkty ochrony przeciwprzepięciowej, dedykowane do linii zasilających, linii pomiarowych oraz transmisyjnych.
Już wkrótce gama produktów z firmy Ewimar, zostanie wzbogacona o nowe produkty ochrony przeciwprzepięciowej, dedykowane do linii zasilających, linii pomiarowych oraz transmisyjnych.
Nowoczesne technologie doprowadziły do wyraźnej transformacji sektora budownictwa, szczególnie w kwestii poprawy efektywności energetycznej. W dobie rosnącej świadomości ekologicznej i zmian klimatycznych...
Nowoczesne technologie doprowadziły do wyraźnej transformacji sektora budownictwa, szczególnie w kwestii poprawy efektywności energetycznej. W dobie rosnącej świadomości ekologicznej i zmian klimatycznych optymalizacja zużycia energii staje się priorytetem. Jednym z ważniejszych kroków prowadzących do obniżenia klasy energetycznej budynków jest wprowadzenie świadectwa energetycznego i nowoczesnych instalacji elektrycznych.
Fronius zapewnia optymalne bezpieczeństwo i wysoki stopień zużycia energii na potrzeby własne w produkcji energii słonecznej – wszystko dzięki wysokiej jakości falownikom, do których dołącza teraz Fronius...
Fronius zapewnia optymalne bezpieczeństwo i wysoki stopień zużycia energii na potrzeby własne w produkcji energii słonecznej – wszystko dzięki wysokiej jakości falownikom, do których dołącza teraz Fronius GEN24.
Odnawialne źródła energii (OZE) odgrywają kluczową rolę w globalnych wysiłkach na rzecz zrównoważonego rozwoju i redukcji emisji gazów cieplarnianych. Jednym z wyzwań związanych z efektywnym wykorzystaniem...
Odnawialne źródła energii (OZE) odgrywają kluczową rolę w globalnych wysiłkach na rzecz zrównoważonego rozwoju i redukcji emisji gazów cieplarnianych. Jednym z wyzwań związanych z efektywnym wykorzystaniem energii ze źródeł odnawialnych jest gromadzenie i przesyłanie wyprodukowanej energii elektrycznej. W tym kontekście technologia cable pooling zyskuje na znaczeniu, umożliwiając zoptymalizowane zarządzanie przesyłem energii elektrycznej ze źródeł OZE.
Oświetlenie LED cieszy się ogromną popularnością i nie ma w tym nic dziwnego, jeśli weźmie się pod lupę wszystkie jego zalety. Żarówki LED są wykorzystywane zarówno w warunkach domowych, jak i na zewnątrz,...
Oświetlenie LED cieszy się ogromną popularnością i nie ma w tym nic dziwnego, jeśli weźmie się pod lupę wszystkie jego zalety. Żarówki LED są wykorzystywane zarówno w warunkach domowych, jak i na zewnątrz, mają różne rozmiary, dzięki czemu można je dopasować do praktycznie każdego rodzaju lamp, są energooszczędne, a to tylko kilka z wielu ich zalet. Na co zwracać uwagę przy zakupie tego rodzaju żarówek i jak dopasować ich parametry do swoich potrzeb?
Przeprowadzenie remontu to drogie i wymagające zadanie. Niemalże wszystkie wykonywane prace zmuszają zainteresowanych do podejmowania poważnych i przemyślanych decyzji finansowych. Mogą to jednak ułatwić...
Przeprowadzenie remontu to drogie i wymagające zadanie. Niemalże wszystkie wykonywane prace zmuszają zainteresowanych do podejmowania poważnych i przemyślanych decyzji finansowych. Mogą to jednak ułatwić niektóre produkty bankowe. O których z nich mowa? Tego lepiej dowiedzieć się jeszcze przed rozpoczęciem prac budowalnych.
Panele fotowoltaiczne są coraz bardziej popularne. W dobie rosnących cen energii wiele osób ceni sobie niezależność od zewnętrznych dostawców prądu, oszczędność, jaką daje fotowoltaika oraz to, że jest...
Panele fotowoltaiczne są coraz bardziej popularne. W dobie rosnących cen energii wiele osób ceni sobie niezależność od zewnętrznych dostawców prądu, oszczędność, jaką daje fotowoltaika oraz to, że jest to ekologiczne źródło energii. Montaż paneli fotowoltaicznych na działce lub dachu domu ma jeszcze jedną zaletę – w przypadku sprzedaży nieruchomości podnosi jej wartość.
Apator SA we współpracy z TAURON Dystrybucja SA uruchomił magazyn energii służący do stabilizacji parametrów pracy sieci dystrybucyjnej niskiego napięcia. To kolejny projekt realizowany przez toruńskiego...
Apator SA we współpracy z TAURON Dystrybucja SA uruchomił magazyn energii służący do stabilizacji parametrów pracy sieci dystrybucyjnej niskiego napięcia. To kolejny projekt realizowany przez toruńskiego producenta dla krajowych Operatorów Sieci Dystrybucji, którzy poszukują skutecznych rozwiązań technicznych do bilansowania sieci oraz redukcji nadmiernych obciążeń w szczytach produkcji energii z odnawialnych źródeł.
Jak wykazano w różnych testach, nie tylko na uczelniach technicznych w Polsce, duży procent ograniczników przepięć (SPD) dostępnych na rynku nie spełnia parametrów deklarowanych w kartach katalogowych....
Jak wykazano w różnych testach, nie tylko na uczelniach technicznych w Polsce, duży procent ograniczników przepięć (SPD) dostępnych na rynku nie spełnia parametrów deklarowanych w kartach katalogowych. Dodatkowo w różnych materiałach marketingowych również można znaleźć nie zawsze pełne informacje na temat wymagań stawianych SPD, co nie pomaga w właściwym doborze odpowiedniego modelu do aplikacji. W tym artykule postaramy się przybliżyć najważniejsze zagadnienia, które pozwolą dobrać bezpieczne ograniczniki...
Wiele ostatnio mówi się o poprawie efektywności energetycznej oraz energii odnawialnej w kontekście redukcji gazów cieplarnianych i rosnących kosztów energii. W silnie konkurencyjnym otoczeniu przedsiębiorstwa...
Wiele ostatnio mówi się o poprawie efektywności energetycznej oraz energii odnawialnej w kontekście redukcji gazów cieplarnianych i rosnących kosztów energii. W silnie konkurencyjnym otoczeniu przedsiębiorstwa wykazują dużą determinację do zmian prowadzących do optymalizacji kosztów, co zapewnić ma im zachowanie przewagi konkurencyjnej, wynikającej np. z przyjętej strategii przewagi kosztowej.
Inteligentny dom często mylony jest z budynkiem pasywnym. Należy jednak pamiętać, że nie można tych dwóch pojęć stosować zamiennie. Samo zastosowanie smart home i innych komponentów automatyki nie czyni...
Inteligentny dom często mylony jest z budynkiem pasywnym. Należy jednak pamiętać, że nie można tych dwóch pojęć stosować zamiennie. Samo zastosowanie smart home i innych komponentów automatyki nie czyni z tradycyjnego domu budynku pasywnego. Niewątpliwie jednak należy pamiętać, że elementy automatyki budynkowej są składową pasywnych budowli i nawet zwykłe mieszkanie potrafią uczynić bardziej oszczędnym i ekologicznym.
Najnowsze przemysłowe drukarki etykiet stworzone zostały z myślą o profesjonalistach, dla których ważna jest jakość, niezawodność oraz trwałość tworzonych oznaczeń. P‑touch E100VP, P-touch E300VP i P-touch...
Najnowsze przemysłowe drukarki etykiet stworzone zostały z myślą o profesjonalistach, dla których ważna jest jakość, niezawodność oraz trwałość tworzonych oznaczeń. P‑touch E100VP, P-touch E300VP i P-touch E550WVP to przenośne i szybkie urządzenia, które oferują specjalne funkcje do druku najpopularniejszych typów etykiet. Urządzenia pozwalają na szybkie i bezproblemowe drukowanie oznaczeń kabli, przewodów, gniazdek elektrycznych, przełączników oraz paneli krosowniczych.
Ta witryna wykorzystuje pliki cookies do przechowywania informacji na Twoim komputerze. Pliki cookies stosujemy w celu świadczenia usług na najwyższym poziomie, w tym w sposób dostosowany do indywidualnych potrzeb. Korzystanie z witryny bez zmiany ustawień dotyczących cookies oznacza, że będą one zamieszczane w Twoim urządzeniu końcowym. W każdym momencie możesz dokonać zmiany ustawień przeglądarki dotyczących cookies. Nim Państwo zaczną korzystać z naszego serwisu prosimy o zapoznanie się z naszą polityką prywatności oraz Informacją o Cookies. Więcej szczegółów w naszej Polityce Prywatności oraz Informacji o Cookies. Administratorem Państwa danych osobowych jest Grupa MEDIUM Spółka z ograniczoną odpowiedzialnością Sp.K., nr KRS: 0000537655, z siedzibą w 04-112 Warszawa, ul. Karczewska 18, tel. +48 22 810-21-24, właściciel strony www.elektro.info.pl. Twoje Dane Osobowe będą chronione zgodnie z wytycznymi polityki prywatności www.elektro.info.pl oraz zgodnie z Rozporządzeniem Parlamentu Europejskiego i Rady (UE) 2016/679 z dnia 27 kwietnia 2016r i z Ustawą o ochronie danych osobowych Dz.U. 2018 poz. 1000 z dnia 10 maja 2018r.