Pomiary ruchu liniowego i obrotowego występują najczęściej w urządzeniach i układach napędowych maszyn wielu gałęzi przemysłu [1, 2]. Przykładem mogą być obrabiarki skrawające, systemy telemetryczne, a także urządzenia dźwigowe i roboty przemysłowe. Niezwykle szybki rozwój elektroniki wymusza opracowanie i produkcję coraz bardziej dokładnych i niezawodnych przetworników pomiarowych przemieszczeń, liczby obrotów oraz kąta obrotu. Występują jednak systemy zintegrowane, które realizują złożone zadania wymagające precyzyjnej kontroli położenia przemieszczeń elementu wykonawczego z użyciem enkodera i wymagają zamkniętej pętli sprzężenia zwrotnego. Jednym z elementów mających wpływ na dokładność maszyny są układy pomiarowe powszechnie zwane liniałami lub enkoderami.
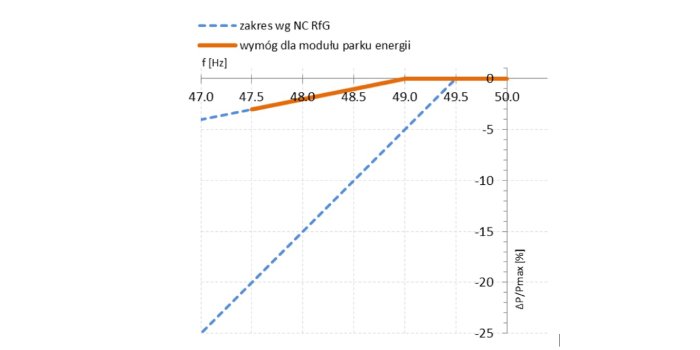
Obecny bardzo gwałtowny rozwój fotowoltaiki – nie tylko w Polsce, ale na całym terenie Unii Europejskiej (UE) – niesie za sobą dużo zalet, takich jak pozyskiwanie energii z praktycznie nieskończonej energii...
Obecny bardzo gwałtowny rozwój fotowoltaiki – nie tylko w Polsce, ale na całym terenie Unii Europejskiej (UE) – niesie za sobą dużo zalet, takich jak pozyskiwanie energii z praktycznie nieskończonej energii słonecznej oraz brak emisji szkodliwych gazów, co przyczynia się do redukcji emisji gazów cieplarnianych i zmniejszenia negatywnego wpływu na środowisko. Przyłączenie dużej liczby odnawialnych źródeł energii (OZE) nie pozostaje jednak bez wpływu na sieci elektroenergetyczne.
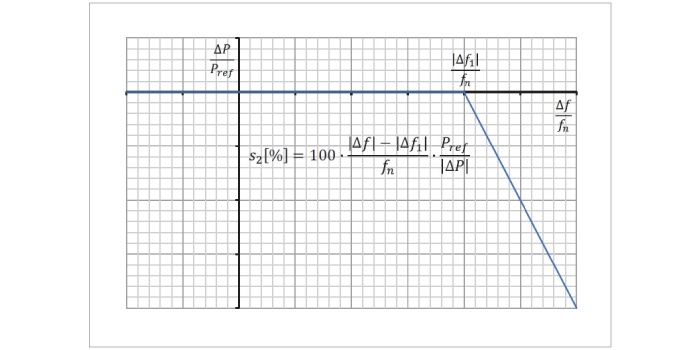
Odpowiedzią na wymagania stawiane przez Kodeks Sieciowy jest opracowanie przez Polskie Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej (PTPiREE) na zlecenie Polskich Sieci Elektroenergetycznych (PSE)...
Odpowiedzią na wymagania stawiane przez Kodeks Sieciowy jest opracowanie przez Polskie Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej (PTPiREE) na zlecenie Polskich Sieci Elektroenergetycznych (PSE) „Wymogów ogólnego stosowania wynikających z Rozporządzenia Komisji (UE) 2016/631 z dnia 14 kwietnia 2016 r., ustanawiającego Kodeks Sieci dotyczący wymogów w zakresie przyłączenia jednostek wytwórczych do sieci (NC RfG)” [4], opublikowanych w roku 2018.
Enkodery inkrementalne
Przeznaczone są do pomiaru przemieszczeń kątowych, zarówno do pomiaru kąta, jak i prędkości kątowych. Przetworniki te umożliwiają określenie pozycji względnej przez zliczanie impulsów. Poza tym może być rozpoznawany kierunek ruchu dzięki przesunięciu fazowemu o 90º kanałów A i B. Oznacza to, że kanał B jest opóźniony w stosunku do kanału A o 90º w przypadku ruchu zgodnie z kierunkiem wskazówek zegara. W przeciwnym przypadku kanał B wyprzedza kanał A o tę samą wartość. Znajomość tej zależności umożliwia określenie kierunku obrotu wałka enkodera. Dodatkowo stosuje się 2 linie z zanegowanymi kanałami A i B, jak i 2 wyjścia referencyjne, jak przedstawiono na rysunku 1. Sygnał wysoki na wyjściach referencyjnych pojawia się, gdy enkoder przechodzi przez jedną ustaloną pozycję na obrocie. Na tej podstawie można zliczać liczbę pełnych obrotów. Kanał zerowy Z oznacza przy każdym obrocie pozycję absolutną, która może służyć do rozpoznawania poprawności przychodzących impulsów i wyznaczania pozycji zerowej. Rozdzielczość określana jest przez liczbę kresek na tarczy podziałowej przetwornika (działek), co odpowiada liczbie okresów z jednego kanału [3, 4].
Enkodery absolutne
Mają naniesiony na tarczy kod cyfrowy, najczęściej Graya, rzadziej binarny lub BCD. Rozdzielczość przetwornika dla 1 obrotu tarczy wynosi 8, 10, 12, 13, 17 czy 40 bitów. Tarcza posiada więc odpowiednio 8, 10, 12, 13, 17 lub 40 okręgów z naniesionymi na przemian odcinkami przezroczystymi i nieprzezroczystymi, stanowiącymi dla układu nadajnika i odbiornika światła źródło sygnałów „0 – 1”. Enkoder z przetwornikiem absolutnym nie jest wrażliwy na zanik zasilania lub wyzerowanie licznika, gdyż nawet po zaniku napięcia i ponownym jego włączeniu enkoder będzie wskazywał aktualną pozycję [3, 4]. Będzie on zliczał od wartości, na której się zatrzymał. Natomiast w przypadku enkodera inkrementalnego po zaniku zasilania i ponownym jego włączeniu enkoder nie wskaże pozycji aktualnej i zacznie zliczać od zera. Enkodery absolutne można podzielić także na jedno- oraz wieloobrotowe. Enkoder jednoobrotowy nie wskazuje, ile wykonał obrotów, ponieważ sygnał wyjściowy jest powtarzany w tym samym formacie, co 360º obrotu wałka wyjściowego. Z tego względu można jedynie odczytać informacje, na jakiej pozycji się zatrzymał lub aktualnie się znajduje.
Magnetyczna detekcja przesunięcia lub kąta obrotu
Chociaż precyzyjny przemysł wykorzystuje przetworniki, które opierają się na optycznych metodach pomiaru, to jest wiele zastosowań, w których można z powodzeniem stosować przetworniki magnetyczne. Induktosynowy (magnetyczny) układ pomiarowy składa się najczęściej z liniału, który ma wbudowane jednoobwodowe uzwojenie z wieloma meandrami oraz głowicy, która ma co najmniej dwa uzwojenia przesunięte względem siebie o pewną wartość. Uzwojenie liniału i przesuwnego detektora wykonuje się metodami napylania ścieżki przewodzącej oddzielonej warstwą materiału nieprzewodzącego od niemagnetycznego materiału. Powierzchnia głowicy pokryta jest warstwą folii aluminiowej w celu wyeliminowania sprzężenia pojemnościowego, które wprowadzałoby do liniału zakłócenia, tym samym obniżając dokładność pomiaru [3, 4].
Innym przykładem jest induktosynowy układ pomiarowy zbudowany z dwóch połączonych różnicowo magnetorezystorów mierzących zmiany strumienia magnetycznego w kierunku prostopadłym do liniału [2, 3]. Czujnik wytwarza na tej podstawie sygnał sinusoidalnie zmienny wówczas, gdy przemieszcza się nad liniałem. Sygnał analogowy jest interpolowany wewnętrznie w celu zapewnienia rozdzielczości nawet do 1 μm. Dokładny odczyt jest zapewniony dzięki właściwemu pozycjonowaniu głowicy odczytowej nad liniałem. W tym celu głowica odczytowa przemieszczała się nad liniałem w odległości nie większej niż 3/4 długości meandra uzwojenia.
Ciekawym rozwiązaniem jest enkoder, który nie posiada mechanicznego sprzężenia pomiędzy elementem pomiarowym a elementem mierzonym. Enkoder składa się z obudowy, która zawiera układ detekcyjny Halla umieszczony w specjalnym otworze pod tulejkę. W tulei zamocowany jest magnes spolaryzowany osiowo, z drugiej strony tulei jest otwór pod wałek wyjściowy. Otwór w obudowie enkodera posiada nieco większą średnicę niż średnica tulei, dzięki czemu możliwy jest jej bezstykowy obrót w otworze obudowy enkodera. Enkodery o takiej budowie charakteryzują się dużą odpornością w trudnych warunkach pracy oraz żywotnością, dzięki bezkontaktowym elementom [4]. Metody magnetyczne pomiaru przemieszczeń kątowych opierają się najczęściej na zjawisku Halla. Enkoder składa się zasadniczo z dwóch elementów: układu scalonego zwierającego sensor pola magnetycznego, elektronicznych przetworników oraz osiowo spolaryzowanego magnesu. Układ scalony zawiera kilkadziesiąt odpowiednio rozmieszczonych mikroprzetworniki Halla. Zasilane są one niewielkim prądem, a pod wpływem pola magnetycznego pochodzącego od magnesu powstaje napięcie Halla prostopadłe do kierunku przepływu prądu [4].
Interesujące rozwiązania
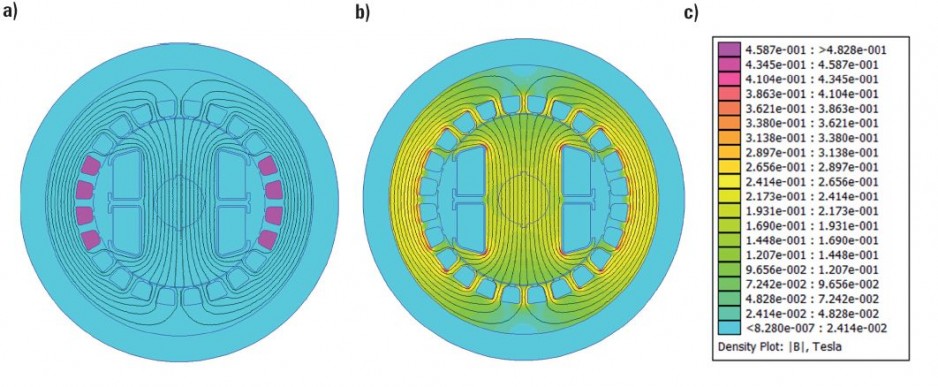
Ciekawym rozwiązaniem jest technika LinACE, która opiera się na kodzie absolutnym zapisanym na nośniku informacji w postać obszarów o różnej przenikalności magnetycznej. Kod ten odczytywany jest następnie przez matrycę zbudowaną z czujników Halla zintegrowanych w jednym układzie półprzewodnikowym. Rowki wykonane w wałku stalowym o wysokiej przenikalnością względnej reprezentują pseudolosową sekwencję binarną (PRBS – kod bezwzględny). Rowki można wypełnić chromem, miedzią lub innym materiałem o niskiej przenikalności magnetycznej w procesie galwanicznego lub termicznego nanoszenia. Przy wstępnej polaryzacji magnetycznej wykrywa się różnice w przenikalności magnetycznej wywoływane przez zmiany strumienia indukcji magnetycznej, który jest wykrywany i przekształcany na sygnał elektryczny przez zintegrowaną macierz czujników Halla [5]. Następnie sygnały elektryczne są przetwarzane przez mikroprocesor przy użyciu algorytmów, w tym transformaty Fouriera, aby określić pozycję na skali milimetrowej z rozdzielczością submikronową. Pole magnetyczne jest wykrywane przez głowicę tylko w bardzo ograniczonej odległości od powierzchni wałka to jest 0,1 ± 0,05 mm. Aby uzyskać prawidłowe prowadzenie głowicy z macierzą czujników Halla po wałku opracowano specjalne łożyskowanie ślizgowe wraz z układem przetwarzania sygnałów. Enkoder LinACE jest absolutnym systemem zintegrowanym w urządzenie wykonawcze, który mierzy z rozdzielczością do 0,5 mm przy prędkości przesuwu do 5 m/s. Długość pomiarowa jest dostępna do 500 mm przy średnicy wałka od 4 do 16 mm. Enkoder może pracować w temperaturze od –40 do 85°C i jest odporny na wstrząsy i wibracje.
Czujniki indukcyjnościowe
Przetworniki indukcyjnościowe (niesłusznie nazywane indukcyjnymi) służą nie tylko do pomiaru przemieszczeń liniowych, ale także innych wielkości, których pomiar da się sprowadzić do pomiaru przesunięć, jak na przykład ciśnienie i siła. Zakresy pomiarowe przetworników indukcyjnościowych obejmują zakres od 10–6 m do nawet 2 m [6].
Zasada działania czujników indukcyjnościowych polega na wykorzystaniu zmian indukcyjności własnej lub wzajemnej ich obwodów elektrycznych, pod wpływem przetwarzanej wielkości. Wielkością tą jest najczęściej przemieszczenie liniowe zmieniające geometrię obwodu magnetycznego, głównie wymiary szczeliny powietrznej [7].
Spośród różnych rozwiązań konstrukcyjnych czujników transformatorowych szerokie zastosowanie znalazły czujniki transformatorowe różnicowe z przesuwanym rdzeniem. Rysunek 2. wyjaśnia zasadę działania takiego czujnika. Zbudowany jest on z trzech uzwojeń: jednego zasilającego, stanowiącego stronę pierwotną transformatora, i dwóch uzwojeń połączonych przeciwsobnie, stanowiących stronę wtórną transformatora. Uzwojenie pierwotne zasilane jest napięciem przemiennym Uzas. W uzwojeniach wtórnych indukowane są napięcia U1 i U2 równe co do wartości, lecz przeciwne w fazie w przypadku, gdy rdzeń magnetyczny znajduje się w środkowym (zerowym) położeniu. Wypadkowe napięcie na zaciskach wyjściowych jest wówczas równe zero. Przemieszczenie rdzenia zmienia współczynnik sprzężenia magnetycznego pomiędzy cewką zasilającą, a cewkami stanowiącymi stronę wtórną transformatora. Przy przesunięciu rdzenia w prawo lub w lewo w stosunku do punktu zerowego, na wyjściu czujnika będzie powstawała różnica napięć proporcjonalna do wartości przesunięcia. W momencie przesuwania rdzenia z jednego skrajnego położenia w drugie, podczas przejścia przez zero zmienia się kąt przesunięcia fazy różnicy napięć względem napięcia zasilania o 180° [7].
Z charakterystyk przetwarzania czujnika transformatorowego różnicowego wynika, że na podstawie pomiaru samego napięcia wyjściowego czujnika nie można określić kierunku przemieszczenia. Informacja o kierunku przemieszczenia zawarta jest w kącie przesunięcia fazy. Stąd koniecznym staje się zastosowanie detektora fazoczułego. Na wyjściu detektora fazoczułego, który zawiera w sobie również człon uśredniający, otrzymuje się napięcie stałe w czasie, którego wartość jest w szerokim zakresie przemieszczeń proporcjonalna do przemieszczenia [7].
Układy pomiarowe przetworników indukcyjnościowych
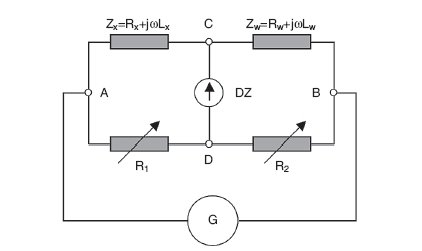
Typowym układem pomiarowym, w którym występują przetworniki indukcyjnościowe i inne, w których wielkością wyjściową jest indukcyjność własna cewki, jest mostek Maxwella, którego schemat ideowy przedstawiony jest na rysunku 3. Przetwornik indukcyjnościowy o impedancji Zx = Rx + jwLx włączany jest w jedno z ramion mostka, w pozostałych trzech ramionach występują natomiast elementy wzorcowe, mianowicie wzorzec indukcyjności własnej (cewka wzorcowa) o impedancji Zw = Rw + jwLw oraz dwa rezystory wzorcowe R1, R2.
Występują dwa typy mostków pomiarowych: mostek zrównoważony oraz mostek niezrównoważony.
W mostku zrównoważonym w przekątnej C–D występuje detektor zera DZ, czyli wskaźnik równowagi (rys. 3.). W takim mostku proces pomiarowy polega na regulowaniu wartości rezystancji R1, R2, aż do chwili uzyskania stanu równowagi, to znaczy zaniku różnicy potencjałów między punktami C–D, co wskazuje detektor DZ. Poszukiwane parametry Rx, Lx oblicza się z odpowiednich wzorów:
Natomiast w mostku niezrównoważonym nie doprowadza się do zaniku różnicy potencjałów między punktami C–D, lecz mierzy napięcie między tymi punktami, jakie pojawia się tam po włączeniu nieznanej impedancji Zx. Detektor zera zastępowany jest tu przez specjalny przyrząd pomiarowy (zwykle woltomierz) wywzorcowany w jednostkach mierzonej wielkości [6].
Mostek zasilany jest napięciem sinusoidalnym, najczęściej o częstotliwości kilku kHz. W układach przetworników indukcyjnościowych transformatorowych sygnałem wyjściowym jest siła elektromotoryczna indukowana w uzwojeniu wtórnym przetwornika, którą mierzy się odpowiednimi miernikami napięcia.
Inne metody pomiarów liniowych i kątowych
W procesie produkcji i kontroli różnych wyrobów niezbędne są pomiary wymiarów geometrycznych. Sprowadzają się one głównie do pomiaru długości i kąta. Służą temu celowi przetworniki przemieszczeń (przesunięć) liniowych lub kątowych.
Duże przemieszczenia mierzy się za pomocą czujników rezystancyjnych potencjometrycznych. Precyzyjnie wykonany opornik drutowy o ruchomym styku ślizgowym zapewnia powtarzalną zależność rezystancji od przesunięcia liniowego lub kątowego [7].
Czujniki potencjometryczne są stosowane do pomiaru wielu innych wielkości, m.in. poziomu płynów w zbiornikach. Wówczas ślizgacz potencjometru jest sprzężony z pływakiem, utrzymującym się na powierzchni płynu, a miernik napięcia lub rezystancji może być wywzorcowany bezpośrednio w jednostkach objętości lub wysokości słupa cieczy.
Do pomiarów przemieszczeń liniowych stosuje się również liczne odmiany czujników indukcyjnych dławikowych lub transformatorowych, o których wspomniano wcześniej. W zależności od rozwiązań konstrukcyjnych mają one różne zakresy pomiarowe.
Przetworniki takie są budowane na zakresy pomiarowe od części milimetra do wielu milimetrów, nawet do ±1000 mm. Zależność napięcia wyjściowego od przesunięcia rdzenia jest najczęściej zbliżona do liniowa. W precyzyjnych wykonaniach błąd liniowości nie przekracza 0,2%.
Małe przesunięcia mogą być mierzone przy zastosowaniu czujników pojemnościowych. W czujnikach tych do pomiaru przesunięć stosuje się zależność pojemności C kondensatora od odległości d między elektrodami [7]:
gdzie:
ε – przenikalność elektryczna,
S – powierzchnia czynna elektrod.
Przykład przetwornika pomiarowego z różnicowym czujnikiem pojemnościowym różnicowym, który ma między dwoma elektrodami nieruchomymi elektrodę ruchomą. Przy symetrycznym ustawieniu elektrody ruchomej w stosunku do nieruchomych, pojemności elektryczne są równe. Przesunięcie elektrody ruchomej w kierunku jednej z elektrod bocznych powoduje wzrost jednej pojemności i zmniejszenie drugiej. Mostkowy układ pomiarowy z fazoczułym miernikiem umożliwia pomiar nawet bardzo małych przesunięć elektrody czujnika pojemnościowego w zakresie od pojedynczych mikrometrów [7].
Innym przykładem są ultradźwiękowe przetworniki przesunięcia, których zasada działania sprowadza się do pomiaru czasu, jaki jest potrzebny na pokonanie mierzonej odległości przez impuls ultradźwiękowy. Do emisji impulsów pomiarowych wykorzystywane są elementy piezoelektryczne pobudzane przebiegami o częstotliwości najczęściej od ok. 20 kHz do 200 kHz. Wybór właściwej częstotliwości jest kompromisem między rozdzielczością i pochłanianiem dźwięku przez ośrodek, w jakim się on rozchodzi [7].
Podsumowanie
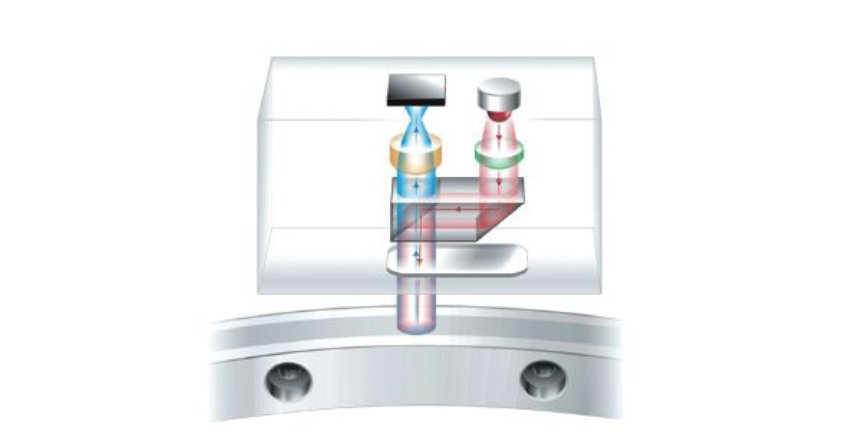
Enkodery znajdują zastosowanie w wielu aplikacjach przemysłowych, począwszy od systemów telemetrycznych, jak i przemyśle kolejowym, tekstylnym oraz urządzeniach wojskowych. Jednym z najpopularniejszych zastosowań przetworników przemieszczeń kątowych są serwonapędy, w których konieczna jest precyzyjna kontrola prędkości obrotowej. Enkodery mogą być również stosowane jako sprzężenie zwrotne w różnych układach napędowych. Natomiast liniowe enkodery stosowane są w układach pomiarowych obrabiarek CNC i maszynach współrzędnościowych jako elementy kontrolne ich poprawnej pracy. Przykładem aplikacji wymagających wysokiej dokładności pozycjonowania i kontroli prędkości jest spawanie laserowe. Innym przykładem są zastosowania medyczne, w których elektryczne urządzenie wykonawcze może być stosowane jako napęd tłoka pompy do dozowania płynów do ciała pacjenta lub pozycjonowania lasera podczas operacji okulistycznych.
Literatura
E. Ratajczyk, Współrzędnościowa technika pomiarowa, OWPW, Warszawa 2005.
S. Tumański, Cienkowarstwowe czujniki magnetorezystancyjne, OWPW, Warszawa 1997.
K. Kuczyński, Precyzyjne pomiary przesunięcia i kata obrotu, „elektro.info” 11/2013.
K. Kuczyński, Enkodery obrotowe – interesujące rozwiązania, „elektro.info” nr 3/2011.
M. Sivec, LinACE in-axis absolute linear encoder, DOI 10.5162/sensor2013/A7.2.
Materiały dydaktyczne Politechniki Białostockiej.
A. Chwaleba, M. Poniński, A. Diedlecki, Metrologia Elektryczna, WNT, Warszawa 2003.
Konkurencja w branży przemysłowej zmusza producentów do ulepszania procesów produkcyjnych, czego efektem jest produkcja detali charakteryzujących się małymi tolerancjami wykonania i krótkim czasem wytwarzania....
Konkurencja w branży przemysłowej zmusza producentów do ulepszania procesów produkcyjnych, czego efektem jest produkcja detali charakteryzujących się małymi tolerancjami wykonania i krótkim czasem wytwarzania. Podobne wymagania stawia się maszynom produkcyjnym, które muszą być coraz dokładniejsze i bardziej wydajne.
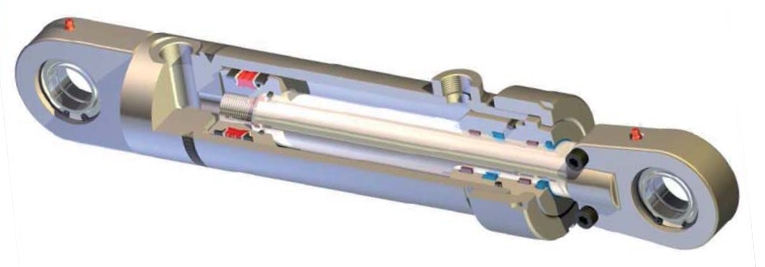
Postępująca miniaturyzacja powoduje, że producenci zobowiązani są do dostarczania urządzeń wykonawczych, które są w stanie wykonywać przemieszczenia o bardzo małych wartościach, w dodatku z bardzo dużą...
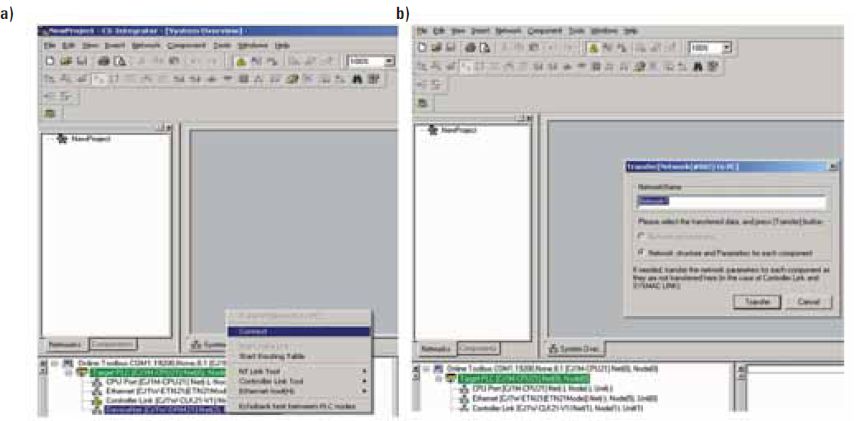
Postępująca miniaturyzacja powoduje, że producenci zobowiązani są do dostarczania urządzeń wykonawczych, które są w stanie wykonywać przemieszczenia o bardzo małych wartościach, w dodatku z bardzo dużą precyzją. Urządzenia wykonawcze, które są w stanie spełniać takie wymagania, to serwonapędy, przy czym najbardziej precyzyjne urządzenia tego typu to serwonapędy elektryczne. W artykule zostanie przedstawiony sposób uruchomienia i sterowania serwonapędu Junma Pulse [1] za pomocą sterownika CJ1M-CPU21.
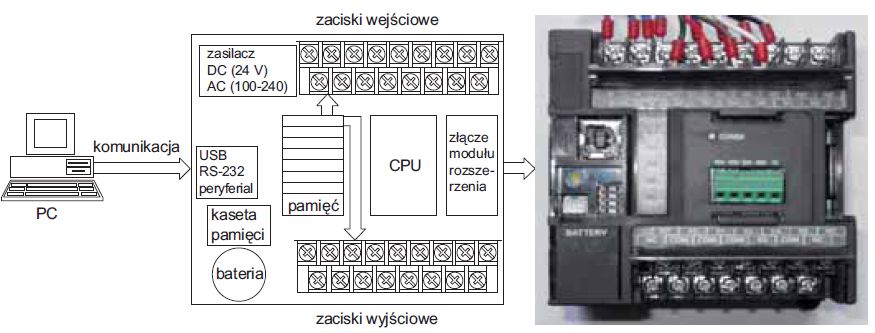
Dostępne na rynku modułowe i kompaktowe sterowniki PLC posiadają duży wybór dodatkowych modułów cyfrowych (tzw. modułów rozszerzających możliwości samego sterownika), takich jak: podstawowych, mieszanych...
Dostępne na rynku modułowe i kompaktowe sterowniki PLC posiadają duży wybór dodatkowych modułów cyfrowych (tzw. modułów rozszerzających możliwości samego sterownika), takich jak: podstawowych, mieszanych wejść i wyjść (digital input, digital output), specjalnych wejść, w których sygnałem wejściowym jest napięcie przemienne AC lub AC/DC, wejść i wyjść TTL, przerwaniowych, szybkich (impulsowych) wejść, szybkiego licznika, wyjść przekaźnikowych.
Wzrastające wymogi co do niezawodności i szybkości podejmowania decyzji (reakcji na zdarzenia), częste zmiany konfiguracyjne i rozbudowa układów sterowania wynikająca ze zmian technologicznych, ułatwienia...
Wzrastające wymogi co do niezawodności i szybkości podejmowania decyzji (reakcji na zdarzenia), częste zmiany konfiguracyjne i rozbudowa układów sterowania wynikająca ze zmian technologicznych, ułatwienia diagnostyki i serwisu, czy znaczne zmniejszenie kosztów itp., wymusiły na konstruktorach sterowników PLC opracowanie takich układów wbudowanych wejść i wyjść oraz modułów rozszerzeń, które mogłyby sprostać tym wymaganiom.
Włączenie transformatora do sieci elektroenergetycznej powoduje powstanie stanów nieustalonych prądu. W wielu przypadkach są to tzw. udary prądu magnesującego. Maksymalna wartość prądu zależy m.in. od...
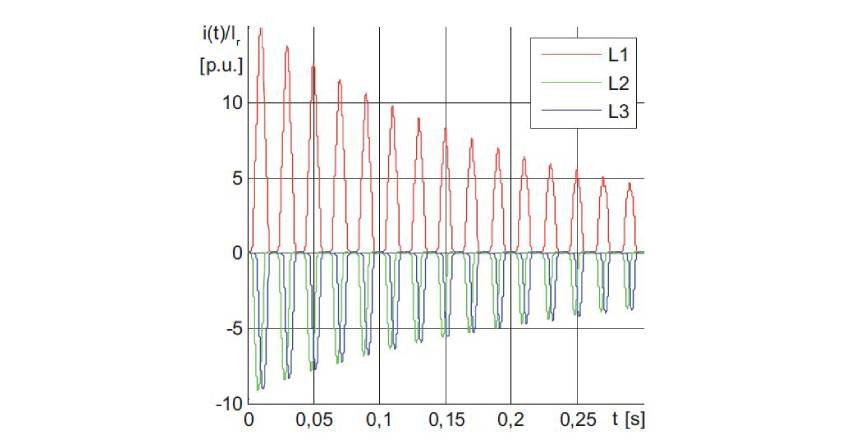
Włączenie transformatora do sieci elektroenergetycznej powoduje powstanie stanów nieustalonych prądu. W wielu przypadkach są to tzw. udary prądu magnesującego. Maksymalna wartość prądu zależy m.in. od cech konstrukcyjnych i parametrów technicznych transformatora, tj. właściwości magnetycznych blachy, z której wykonano rdzeń, budowy rdzenia, mocy znamionowej, układu połączeń uzwojeń, a także od odległości uzwojenia magnesującego od rdzenia.
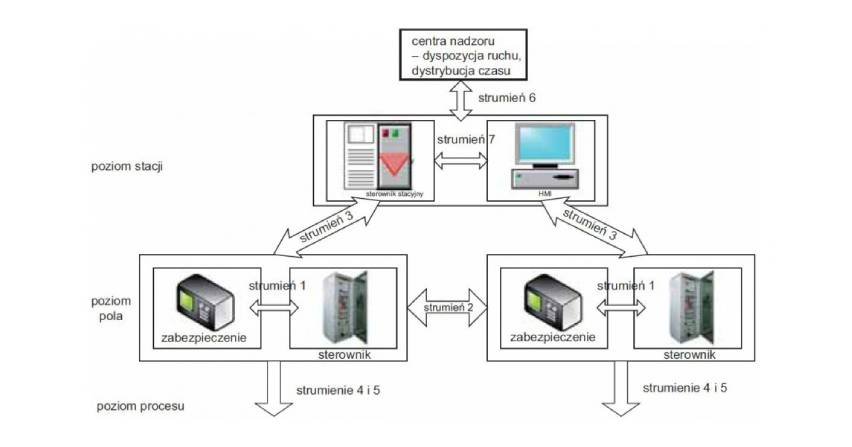
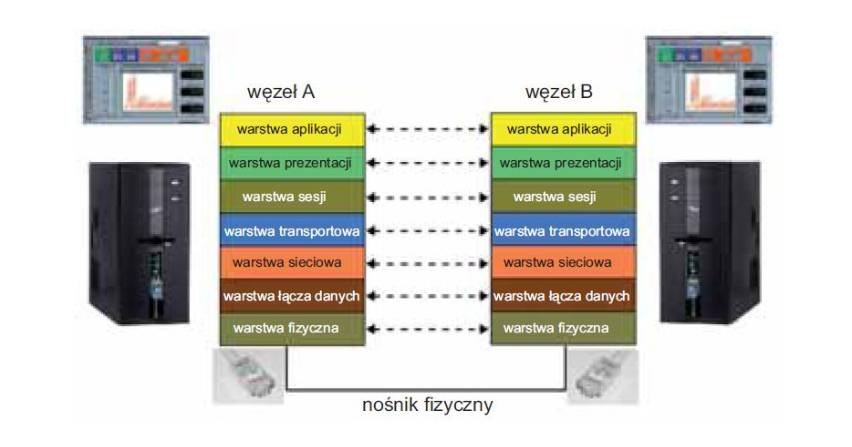
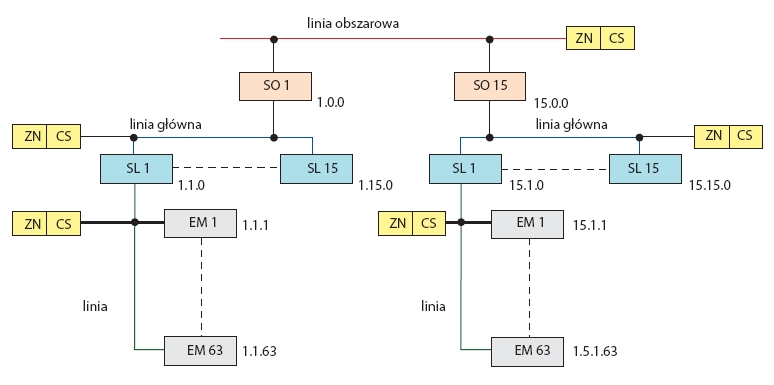
Standard IEC 61850 systematyzuje zagadnienia związane z wymianą danych w systemach elektroenergetycznych. Norma rewolucjonizuje podejście do realizacji systemów stacyjnych, proponując obiektowy model...
Standard IEC 61850 systematyzuje zagadnienia związane z wymianą danych w systemach elektroenergetycznych. Norma rewolucjonizuje podejście do realizacji systemów stacyjnych, proponując obiektowy model danych, obejmujący swoim zasięgiem wszystkie trzy poziomy komunikacji wyróżniane w stacji elektroenergetycznej: poziom procesu, pola, stacji oraz zastosowanie wspólnej infrastruktury komunikacyjnej opartej na sieci Ethernet.
Włączeniu transformatora do systemu elektroenergetycznego (SEE) towarzyszy stan nieustalony prądu zasilającego. Zjawisko to ma charakter losowy, ponieważ jest zdeterminowane wieloma czynnikami. Zależy...
Włączeniu transformatora do systemu elektroenergetycznego (SEE) towarzyszy stan nieustalony prądu zasilającego. Zjawisko to ma charakter losowy, ponieważ jest zdeterminowane wieloma czynnikami. Zależy m.in. od cech konstrukcyjnych i parametrów technicznych transformatora i kąta fazowego napięcia zasilającego w chwili włączenia transformatora. Wybrane zagadnienia związane z udarami prądu magnesującego oraz ich wpływem na prawidłowość działania zabezpieczeń nadprądowych transformatorów SN omówione...
Aplikacje przemysłowe są jednymi z najbardziej zaawansowanych i wymagających, zarówno, jeśli chodzi o wykorzystywany sprzęt, jak i metody komunikacji pomiędzy modułami wykonawczymi. Ze względu na fundamentalne...
Aplikacje przemysłowe są jednymi z najbardziej zaawansowanych i wymagających, zarówno, jeśli chodzi o wykorzystywany sprzęt, jak i metody komunikacji pomiędzy modułami wykonawczymi. Ze względu na fundamentalne znaczenie dla gospodarki oraz społeczeństwa, systemy wykorzystywane w przemyśle (cukrownictwo, petrochemia, hutnictwo itp.) muszą być projektowane ze szczególną precyzją. Ich działanie musi być również niezawodne, co sprzyja rozwijaniu metod monitorowania i diagnostyki. Pojawienie się...
W większości opracowań tematyka związana z syntezą układów logicznych jest przedstawiana przede wszystkim w formie zagadnień związanych z projektowaniem i optymalizacją budowy układów cyfrowych. Stosunkowo...
W większości opracowań tematyka związana z syntezą układów logicznych jest przedstawiana przede wszystkim w formie zagadnień związanych z projektowaniem i optymalizacją budowy układów cyfrowych. Stosunkowo mały nacisk kładzie się na fakt wykorzystania tych zagadnień w projektowaniu oprogramowania dla układów sterownikowych. Podczas tworzenia programu, który później zostanie załadowany do sterownika, należy zwrócić uwagę, aby tworzony algorytm sterowania był najbardziej optymalny. W tym kontekście...
Przekładniki prądowe i napięciowe wchodzą w skład elementów wejściowych struktury układu automatyki zabezpieczeniowej. Służą do zbierania i wstępnego przetwarzania wielkości fizycznych, charakteryzujących...
Przekładniki prądowe i napięciowe wchodzą w skład elementów wejściowych struktury układu automatyki zabezpieczeniowej. Służą do zbierania i wstępnego przetwarzania wielkości fizycznych, charakteryzujących stan pracy obiektu chronionego, na znormalizowane wartości wtórne, odpowiednie do zasilania dalszych układów, proporcjonalne do wielkości pierwotnych, zgodnie ze zdefiniowanym współczynnikiem transformacji – przekładnią.
Na rynku znajduje się wielu producentów oferujących modułowe sterowniki PLC. Różnią się one liczbą dostępnych funkcji oraz językiem programowania stosowanym do konfiguracji urządzenia. Zastosowanie...
Na rynku znajduje się wielu producentów oferujących modułowe sterowniki PLC. Różnią się one liczbą dostępnych funkcji oraz językiem programowania stosowanym do konfiguracji urządzenia. Zastosowanie dedykowanej aplikacji pozwala użytkownikowi na swobodny dostęp do modułów połączonych w sieci przemysłowej za pomocą jednego interfejsu komunikacyjnego. Przyczynia się to do uproszczenia programowania oraz umożliwia zdalny dostęp i serwis urządzenia.
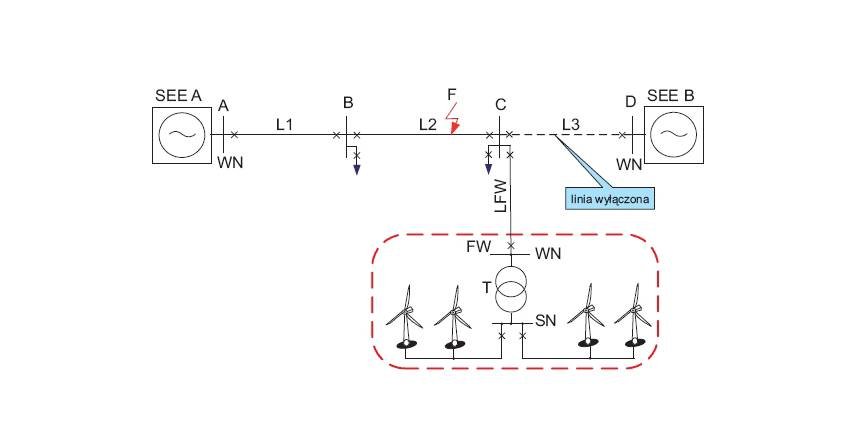
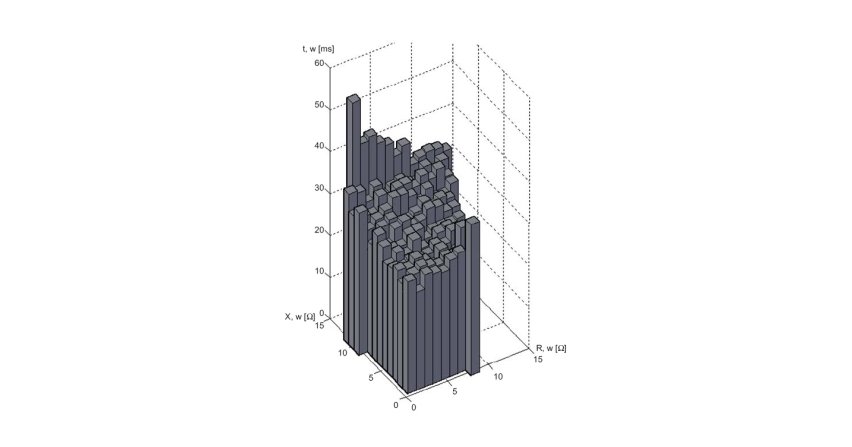
Zabezpieczenie odległościowe to element elektroenergetycznej automatyki zabezpieczeniowej (EAZ), który służy m.in. do ochrony linii WN przed skutkami zwarć wielkoprądowych. Algorytm decyzyjny tego zabezpieczenia...
Zabezpieczenie odległościowe to element elektroenergetycznej automatyki zabezpieczeniowej (EAZ), który służy m.in. do ochrony linii WN przed skutkami zwarć wielkoprądowych. Algorytm decyzyjny tego zabezpieczenia bazuje na kryterium podimpedancyjnym. Zasada działania polega na wyznaczaniu parametrów wektora impedancji na podstawie sygnałów napięciowych i prądowych.
Różnorodność urządzeń oraz systemów związanych z działalnością człowieka rośnie znacząco wraz z rozwojem techniki i nauki. Techniki mikroprocesorowe stosowane są praktycznie wszędzie i nie stanowią już...
Różnorodność urządzeń oraz systemów związanych z działalnością człowieka rośnie znacząco wraz z rozwojem techniki i nauki. Techniki mikroprocesorowe stosowane są praktycznie wszędzie i nie stanowią już tylko uniwersalnych maszyn obliczeniowych, lecz wykorzystywane są w modułach sterujących pracą praktycznie wszystkich systemów wykorzystywanych w przemyśle oraz w życiu codziennym.
Urządzenia przekaźnikowe stanowią jedną z najszerszych grup urządzeń elektrycznych stosowanych na kolei. Przekaźniki wykorzystywane są w układach sterowania, sygnalizacji i zabezpieczeń. Przekaźniki prądu...
Urządzenia przekaźnikowe stanowią jedną z najszerszych grup urządzeń elektrycznych stosowanych na kolei. Przekaźniki wykorzystywane są w układach sterowania, sygnalizacji i zabezpieczeń. Przekaźniki prądu stałego najczęściej są urządzeniami elektromagnetycznymi.
Prawidłowe funkcjonowanie elektroenergetycznej automatyki zabezpieczeniowej sieci WN w wielu przypadkach warunkowane jest odpowiednio dużą wartością prądu zwarciowego. Niewielka wartość prądu zwarciowego...
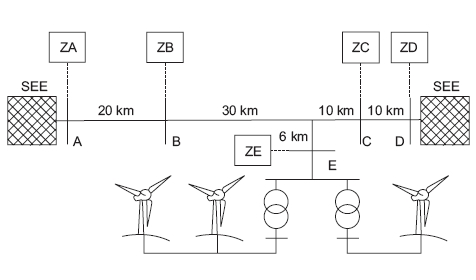
Prawidłowe funkcjonowanie elektroenergetycznej automatyki zabezpieczeniowej sieci WN w wielu przypadkach warunkowane jest odpowiednio dużą wartością prądu zwarciowego. Niewielka wartość prądu zwarciowego generowanego przez farmę wiatrową w niektórych stanach pracy sieci WN może być przyczyną problemów związanych z prawidłową identyfikacją i lokalizacją zakłóceń zwarciowych. Niewłaściwe działanie elektroenergetycznej automatyki zabezpieczeniowej w takich układach pracy może generować zagrożenie zarówno...
Nowatorski układ automatyki SZR ma zastosowanie w rozdzielnicach SN w izolacji napowietrznej średniego napięcia. Rozwiązanie zostanie pokazane na przykładzie trójpolowej rozdzielnicy typu RSL 24 kV (2...
Nowatorski układ automatyki SZR ma zastosowanie w rozdzielnicach SN w izolacji napowietrznej średniego napięcia. Rozwiązanie zostanie pokazane na przykładzie trójpolowej rozdzielnicy typu RSL 24 kV (2 pola liniowe i pole transformatorowo-pomiarowe) w wykonaniu łukoochronnym. Pola liniowe wyposażone są w rozłączniki OM(B)-24/T/P/UD/160/R z napędami silnikowymi NSW30. Pole transformatorowe wyposażone jest w rozłącznik OMB-24/T/P/BDT/160 z napędem ręcznym typu NRK.
W systemach elektronicznych często zachodzi potrzeba zapewnienia pracy urządzenia przez określony czas po zaniku napięcia zasilania. Związane jest to z koniecznością realizacji szeregu funkcji przygotowujących...
W systemach elektronicznych często zachodzi potrzeba zapewnienia pracy urządzenia przez określony czas po zaniku napięcia zasilania. Związane jest to z koniecznością realizacji szeregu funkcji przygotowujących system do wyłączenia oraz sygnalizacją tego stanu do zewnętrznych systemów. Istnieje również konieczność przesłania informacji diagnostycznych o monitorowanym systemie do systemu nadrzędnego.
Dynamiczny rozwój techniki cyfrowej spowodował szerokie jej zastosowanie w elektroenergetyce. Liczne zalety sprawiły, że dotychczas stosowane rozwiązania elektromechaniczne i elektroniczne analogowe zabezpieczeń...
Dynamiczny rozwój techniki cyfrowej spowodował szerokie jej zastosowanie w elektroenergetyce. Liczne zalety sprawiły, że dotychczas stosowane rozwiązania elektromechaniczne i elektroniczne analogowe zabezpieczeń zostały w większości zastąpione rozwiązaniami cyfrowymi. Zastosowanie mikroprocesorów i rozwój oprogramowania umożliwiły koncentrację wielu funkcji zabezpieczeniowych w ramach jednego urządzenia, nazywanego cyfrowym zespołem automatyki zabezpieczeniowej.
Układy automatyki są obecnie jednymi z najintensywniej rozwijanych systemów elektroniki i elektrotechniki. Ułatwiają one pracę zarówno instalacji przemysłowych, takich jak elektrownie, cukrownie, czy fabryki...
Układy automatyki są obecnie jednymi z najintensywniej rozwijanych systemów elektroniki i elektrotechniki. Ułatwiają one pracę zarówno instalacji przemysłowych, takich jak elektrownie, cukrownie, czy fabryki odzieży, jak i budynków komercyjnych, m.in. biurowców czy centrów handlowych. Pomimo że ogólna idea takiego systemu pozostaje niezmienna od kilkudziesięciu lat, wprowadzenie układów mikroprocesorowych oraz zaawansowanych technologii czujników i elementów wykonawczych pozwoliło znacząco rozszerzyć...
Układy samoczynnego załączania rezerwy (SZR) pozwalają na automatyczne załączanie odbiorników do toru rezerwowego w przypadku zaniku napięcia w torze zasilania podstawowego. Po powrocie napięcia w torze...
Układy samoczynnego załączania rezerwy (SZR) pozwalają na automatyczne załączanie odbiorników do toru rezerwowego w przypadku zaniku napięcia w torze zasilania podstawowego. Po powrocie napięcia w torze zasilania podstawowego następuje automatyczny powrót układu zasilania do stanu pierwotnego. Układy SZR są najczęściej stosowane w obiektach, w których wymagana jest ciągłość zasilania, na przykład w szpitalach, bankach czy budynkach użyteczności publicznej. Szpital jest obiektem, w którym nawet krótka...
W inteligentnych budynkach występują różne instalacje i systemy sterowania. Systemy te zwykle dotyczą takich obszarów zastosowań, jak: bezpieczeństwo, komfort klimatyczny, zarządzanie energią oraz automatyzacja...
W inteligentnych budynkach występują różne instalacje i systemy sterowania. Systemy te zwykle dotyczą takich obszarów zastosowań, jak: bezpieczeństwo, komfort klimatyczny, zarządzanie energią oraz automatyzacja miejsc pracy. Szczególne znaczenie w systemach automatyki budynkowej mają tzw. otwarte systemy sterowania, do których należy m.in. system KNX. System ten, wykorzystujący logikę sterowania rozproszonego, stosowany jest głównie w obiektach mieszkalnych oraz w obiektach użyteczności publicznej.
W równaniach strumieniowo-napięciowych opisujących model matematyczny maszyny synchronicznej jawnobiegunowej w układzie osi naturalnych związanych ze stojanem oraz z wirnikiem (bez obwodów tłumiących)...
W równaniach strumieniowo-napięciowych opisujących model matematyczny maszyny synchronicznej jawnobiegunowej w układzie osi naturalnych związanych ze stojanem oraz z wirnikiem (bez obwodów tłumiących) z uwzględnieniem elektrycznego kąta położenia wirnika ϑ występują rozkłady:
indukcyjności własnych uzwojeń pasmowych stojana La, Lb, Lc oraz uzwojenia wzbudzenia Lf,
indukcyjności wzajemnych uzwojeń pasmowych stojana Lab, Lbc, Lca, Lba, Lcb, Lac.
indukcyjności wzajemnych uzwojeń pasmowych stojana...
Interfejs CAN powstał na potrzeby przemysłu motoryzacyjnego, ale ze względu na swoje zalety, takie jak odporność na błędy transmisji i wprowadzony standard, znalazł zastosowanie również w innych gałęziach...
Interfejs CAN powstał na potrzeby przemysłu motoryzacyjnego, ale ze względu na swoje zalety, takie jak odporność na błędy transmisji i wprowadzony standard, znalazł zastosowanie również w innych gałęziach przemysłu. Jego szczególnie intensywny rozwój nastąpił w dziedzinie szeroko pojętej automatyki, w tym w obszarze inteligentnych czujników, uniwersalnych modułów sterowania oraz w napędach.
Urządzenia wykonawcze są stosowane w zwykłych zadaniach, gdzie jeden napęd realizuje pojedynczy ruch, jak również w zaawansowanych systemach, gdzie wiele urządzeń wykonawczych wykonuje skoordynowane i...
Urządzenia wykonawcze są stosowane w zwykłych zadaniach, gdzie jeden napęd realizuje pojedynczy ruch, jak również w zaawansowanych systemach, gdzie wiele urządzeń wykonawczych wykonuje skoordynowane i kontrolowane przemieszczenia (np. roboty przemysłowe). Proste zadania są łatwo realizowane i zwykle wymagają nieskomplikowanych rozwiązań do kontroli położenia urządzenia wykonawczego. Występują jednak bardziej złożone systemy zintegrowane, które realizują złożone zadania wymagające kontroli przemieszczeń...
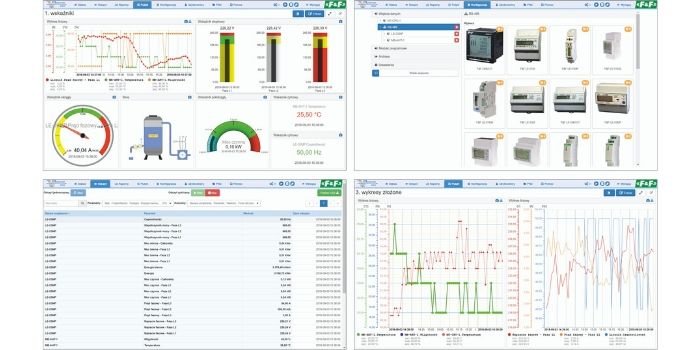
Zapewnienie właściwej jakości energii elektrycznej, w tym brak przerw w dostawie energii oraz opłat za ponadumowny pobór energii elektrycznej, należą do zadań służb energetycznych w zakładzie przemysłowym....
Zapewnienie właściwej jakości energii elektrycznej, w tym brak przerw w dostawie energii oraz opłat za ponadumowny pobór energii elektrycznej, należą do zadań służb energetycznych w zakładzie przemysłowym. Aby móc wypełnić wskazane zadania, niezbędne są rzetelne dane o parametrach jakości energii elektrycznej. W tym celu można stosować stacjonarne analizatory jakości energii elektrycznej firmy A-Eberle typu PQI-DA Smart.
Klimatyzatory ścienne split to idealne rozwiązanie do chłodzenia wnętrz zarówno w domach, jak i mieszkaniach. Umożliwiają efektywną regulację temperatury, zapewniając komfort nawet w najgorętsze dni.
Klimatyzatory ścienne split to idealne rozwiązanie do chłodzenia wnętrz zarówno w domach, jak i mieszkaniach. Umożliwiają efektywną regulację temperatury, zapewniając komfort nawet w najgorętsze dni.
Zakończono półtoraroczny projekt termomodernizacji w Sanktuarium Matki Bożej Bolesnej, Pani Ziemi Świętokrzyskiej, zlokalizowanym w Kałkowie-Godowie. Obecnie zarówno duchowni, jak i pielgrzymi odwiedzający...
Zakończono półtoraroczny projekt termomodernizacji w Sanktuarium Matki Bożej Bolesnej, Pani Ziemi Świętokrzyskiej, zlokalizowanym w Kałkowie-Godowie. Obecnie zarówno duchowni, jak i pielgrzymi odwiedzający to miejsce, mają dostęp do zaawansowanego technologicznie systemu grzewczego.
Składane schody prowadzące na strych są popularną alternatywą dla tradycyjnych schodów, które zazwyczaj zajmują bardzo dużo miejsca. W jakie konstrukcje warto zainwestować? Czym się charakteryzują?
Składane schody prowadzące na strych są popularną alternatywą dla tradycyjnych schodów, które zazwyczaj zajmują bardzo dużo miejsca. W jakie konstrukcje warto zainwestować? Czym się charakteryzują?
Konstruktorzy szaf sterowniczych stoją przed wieloma wyzwaniami: począwszy od międzynarodowej presji konkurencyjnej i niedoboru wykwalifikowanych pracowników, po rosnące koszty pracy i materiałów. Stosunkowo...
Konstruktorzy szaf sterowniczych stoją przed wieloma wyzwaniami: począwszy od międzynarodowej presji konkurencyjnej i niedoboru wykwalifikowanych pracowników, po rosnące koszty pracy i materiałów. Stosunkowo niewiele można zrobić, aby wpłynąć na te aspekty, dlatego coraz częściej w centrum uwagi znajduje się produkcja własna ze wszystkimi procesami i strukturami, a także ogólna struktura kosztów.
Kompatybilność elektromagnetyczna kabli elektrycznych jest kluczowym parametrem, który charakteryzuje sposób stosowania i użytkowania danych kabli do wzajemnej współpracy kilku urządzeń elektrycznych zestawionych...
Kompatybilność elektromagnetyczna kabli elektrycznych jest kluczowym parametrem, który charakteryzuje sposób stosowania i użytkowania danych kabli do wzajemnej współpracy kilku urządzeń elektrycznych zestawionych w całość. Prawidłowe funkcjonowanie urządzeń może być zapewnione tylko i wyłącznie wtedy, gdy zakłócenia generowane przez otoczenie będą skutecznie blokowane. Generowane spodziewane zakłócenia elektromagnetyczne przez wyposażenie otaczające kable muszą zatem być w odpowiedni sposób odseparowane.
Dzięki kopii zapasowej możesz wykonać kopię całej zawartości swojego komputera. W ten sposób nie stracisz swoich plików i programów. Istnieją różne typy pamięci zewnętrznych z oddzielną funkcją tworzenia...
Dzięki kopii zapasowej możesz wykonać kopię całej zawartości swojego komputera. W ten sposób nie stracisz swoich plików i programów. Istnieją różne typy pamięci zewnętrznych z oddzielną funkcją tworzenia kopii zapasowych. Czytaj dalej i dowiedz się, który z nich może odpowiadać Twoim potrzebom!
Na początku 2024 roku firma BayWa r.e. Solar Systems zrobiła kolejny duży krok w rozwoju działalności na polskim rynku, otwierając nowy magazyn w Gdańsku. Jego powierzchnia to
25 000 m kw., co łącznie...
Na początku 2024 roku firma BayWa r.e. Solar Systems zrobiła kolejny duży krok w rozwoju działalności na polskim rynku, otwierając nowy magazyn w Gdańsku. Jego powierzchnia to
25 000 m kw., co łącznie daje ponad 45 tys. m kw. powierzchni magazynowej BayWa r.e. Solar Systems w Polsce.
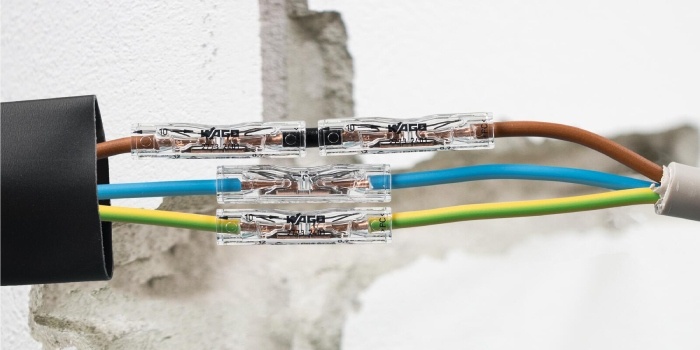
Dzięki takim złączkom od firmy WAGO ELWAG naprawienie lub przedłużenie przewodu jest tak proste jak nigdy dotąd! Za ich pomocą można nawet w najmniejszych przestrzeniach – szybko i bez użycia narzędzi...
Dzięki takim złączkom od firmy WAGO ELWAG naprawienie lub przedłużenie przewodu jest tak proste jak nigdy dotąd! Za ich pomocą można nawet w najmniejszych przestrzeniach – szybko i bez użycia narzędzi – połączyć przewody o przekroju od 0,75 do 4 mm kw. Wystarczy po prostu odizolować końcówkę przewodu i bez użycia jakichkolwiek narzędzi wsunąć ją do złączki – i bezpieczne połączenie gotowe.
Aby przeciwdziałać negatywnym skutkom wyższych harmonicznych, można wykorzystać różne rozwiązania. Uzależnione są one od takich czynników jak: moc zapotrzebowana w zakładzie, sztywność sieci zasilającej,...
Aby przeciwdziałać negatywnym skutkom wyższych harmonicznych, można wykorzystać różne rozwiązania. Uzależnione są one od takich czynników jak: moc zapotrzebowana w zakładzie, sztywność sieci zasilającej, moc odbiorników czy budowa samej instalacji elektroenergetycznej. Dobór konkretnego rozwiązania powinien opierać się na analizie układu zasilającego zakład, reżimu pracy i zainstalowanych odbiorników. Bardzo ważnym punktem doboru jest wykonanie pomiarów Jakości Energii Elektrycznej i ich prawidłowa...
Magazyny energii mogą być źródłem zasilania tylko wtedy gdy są sprawne. Systemy umożliwiające pracę urządzeń w przypadku awarii zasilania są zróżnicowane od małych urządzeń UPS do baterii akumulatorów...
Magazyny energii mogą być źródłem zasilania tylko wtedy gdy są sprawne. Systemy umożliwiające pracę urządzeń w przypadku awarii zasilania są zróżnicowane od małych urządzeń UPS do baterii akumulatorów zapewniających zasilanie całych zakładów. Jest zatem sprawą kluczową, aby systemy zasilania awaryjnego same działały bez zarzutu. Bezpieczniki produkowane przez firmę SIBA zabezpieczają urządzenia, które w przypadku awarii zasilania dostarczają energię kluczowym odbiorom.
Niniejszy artykuł zawiera informacje o projektowaniu schematów elektrycznych i używaniu oprogramowania wspomagającego projektowanie w branży elektrycznej i automatyce.
Niniejszy artykuł zawiera informacje o projektowaniu schematów elektrycznych i używaniu oprogramowania wspomagającego projektowanie w branży elektrycznej i automatyce.
W związku z dynamicznym rozwojem farm fotowoltaicznych rośnie zapotrzebowanie na prawidłowe pomiary impedancji pętli zwarcia na odcinku inwerter-transformator nn/SN. Z pomocą przychodzi Sonel MZC-340-PV...
W związku z dynamicznym rozwojem farm fotowoltaicznych rośnie zapotrzebowanie na prawidłowe pomiary impedancji pętli zwarcia na odcinku inwerter-transformator nn/SN. Z pomocą przychodzi Sonel MZC-340-PV – pierwszy na świecie miernik przeznaczony do pomiarów impedancji pętli zwarcia w sieciach o napięciach dochodzących aż do 900 V AC, z kategorią pomiarową CAT IV 1000 V.
Wyładowania atmosferyczne jako nieodłączny element burz stanowią poważne zagrożenie dla ludzi oraz infrastruktury. Aby zminimalizować ryzyko strat spowodowanych przez wyładowania atmosferyczne, można skutecznie...
Wyładowania atmosferyczne jako nieodłączny element burz stanowią poważne zagrożenie dla ludzi oraz infrastruktury. Aby zminimalizować ryzyko strat spowodowanych przez wyładowania atmosferyczne, można skutecznie zabezpieczać wszelkiego rodzaju obiekty, projektując i montując instalację odgromową zgodną z obowiązującymi przepisami.
Elektroklub jest programem partnerskim dla klientów wybranych hurtowni elektrotechnicznych, który powstał we współpracy z trzema producentami z tej branży: Philips, NKT i Schneider Electric. Obecnie trwa...
Elektroklub jest programem partnerskim dla klientów wybranych hurtowni elektrotechnicznych, który powstał we współpracy z trzema producentami z tej branży: Philips, NKT i Schneider Electric. Obecnie trwa w nim wiosenna promocja, w której można wygrać supernagrody!
Chcesz zwiększyć wydajność swojej instalacji fotowoltaicznej? Pomyśl o inwerterach hybrydowych. Dowiedz się, czym są te urządzenia, jakie korzyści płyną z ich wykorzystania i dlaczego to właśnie one są...
Chcesz zwiększyć wydajność swojej instalacji fotowoltaicznej? Pomyśl o inwerterach hybrydowych. Dowiedz się, czym są te urządzenia, jakie korzyści płyną z ich wykorzystania i dlaczego to właśnie one są przyszłością zrównoważonej energetyki.
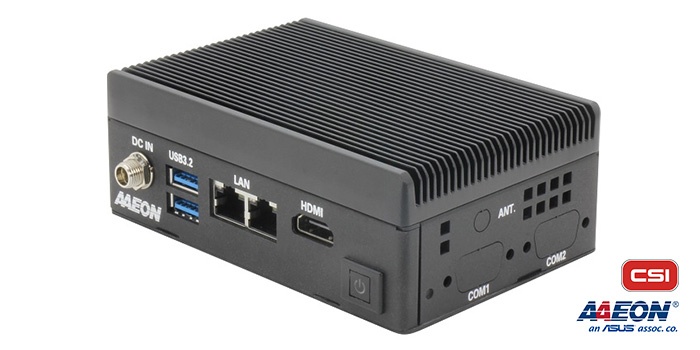
Firma CSI S.A. poszerza ofertę komputerów Mini PC o nowy produkt z serii PICO-SEMI od AAEON. Komputer PICO-EHL4-SEMI jest dostępny w dwóch wersjach procesorowych: Intel® Celeron® J6412 o mocy 10 W i Intel®...
Firma CSI S.A. poszerza ofertę komputerów Mini PC o nowy produkt z serii PICO-SEMI od AAEON. Komputer PICO-EHL4-SEMI jest dostępny w dwóch wersjach procesorowych: Intel® Celeron® J6412 o mocy 10 W i Intel® Celeron® N6210 o mocy 6,5 W.
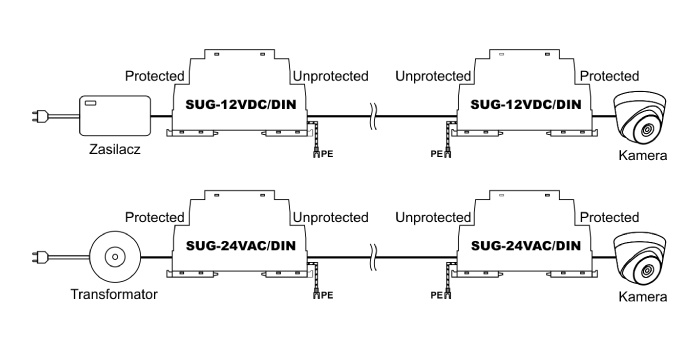
Już wkrótce gama produktów z firmy Ewimar, zostanie wzbogacona o nowe produkty ochrony przeciwprzepięciowej, dedykowane do linii zasilających, linii pomiarowych oraz transmisyjnych.
Już wkrótce gama produktów z firmy Ewimar, zostanie wzbogacona o nowe produkty ochrony przeciwprzepięciowej, dedykowane do linii zasilających, linii pomiarowych oraz transmisyjnych.
Nowoczesne technologie doprowadziły do wyraźnej transformacji sektora budownictwa, szczególnie w kwestii poprawy efektywności energetycznej. W dobie rosnącej świadomości ekologicznej i zmian klimatycznych...
Nowoczesne technologie doprowadziły do wyraźnej transformacji sektora budownictwa, szczególnie w kwestii poprawy efektywności energetycznej. W dobie rosnącej świadomości ekologicznej i zmian klimatycznych optymalizacja zużycia energii staje się priorytetem. Jednym z ważniejszych kroków prowadzących do obniżenia klasy energetycznej budynków jest wprowadzenie świadectwa energetycznego i nowoczesnych instalacji elektrycznych.
Fronius zapewnia optymalne bezpieczeństwo i wysoki stopień zużycia energii na potrzeby własne w produkcji energii słonecznej – wszystko dzięki wysokiej jakości falownikom, do których dołącza teraz Fronius...
Fronius zapewnia optymalne bezpieczeństwo i wysoki stopień zużycia energii na potrzeby własne w produkcji energii słonecznej – wszystko dzięki wysokiej jakości falownikom, do których dołącza teraz Fronius GEN24.
Odnawialne źródła energii (OZE) odgrywają kluczową rolę w globalnych wysiłkach na rzecz zrównoważonego rozwoju i redukcji emisji gazów cieplarnianych. Jednym z wyzwań związanych z efektywnym wykorzystaniem...
Odnawialne źródła energii (OZE) odgrywają kluczową rolę w globalnych wysiłkach na rzecz zrównoważonego rozwoju i redukcji emisji gazów cieplarnianych. Jednym z wyzwań związanych z efektywnym wykorzystaniem energii ze źródeł odnawialnych jest gromadzenie i przesyłanie wyprodukowanej energii elektrycznej. W tym kontekście technologia cable pooling zyskuje na znaczeniu, umożliwiając zoptymalizowane zarządzanie przesyłem energii elektrycznej ze źródeł OZE.
Oświetlenie LED cieszy się ogromną popularnością i nie ma w tym nic dziwnego, jeśli weźmie się pod lupę wszystkie jego zalety. Żarówki LED są wykorzystywane zarówno w warunkach domowych, jak i na zewnątrz,...
Oświetlenie LED cieszy się ogromną popularnością i nie ma w tym nic dziwnego, jeśli weźmie się pod lupę wszystkie jego zalety. Żarówki LED są wykorzystywane zarówno w warunkach domowych, jak i na zewnątrz, mają różne rozmiary, dzięki czemu można je dopasować do praktycznie każdego rodzaju lamp, są energooszczędne, a to tylko kilka z wielu ich zalet. Na co zwracać uwagę przy zakupie tego rodzaju żarówek i jak dopasować ich parametry do swoich potrzeb?
Przeprowadzenie remontu to drogie i wymagające zadanie. Niemalże wszystkie wykonywane prace zmuszają zainteresowanych do podejmowania poważnych i przemyślanych decyzji finansowych. Mogą to jednak ułatwić...
Przeprowadzenie remontu to drogie i wymagające zadanie. Niemalże wszystkie wykonywane prace zmuszają zainteresowanych do podejmowania poważnych i przemyślanych decyzji finansowych. Mogą to jednak ułatwić niektóre produkty bankowe. O których z nich mowa? Tego lepiej dowiedzieć się jeszcze przed rozpoczęciem prac budowalnych.
Panele fotowoltaiczne są coraz bardziej popularne. W dobie rosnących cen energii wiele osób ceni sobie niezależność od zewnętrznych dostawców prądu, oszczędność, jaką daje fotowoltaika oraz to, że jest...
Panele fotowoltaiczne są coraz bardziej popularne. W dobie rosnących cen energii wiele osób ceni sobie niezależność od zewnętrznych dostawców prądu, oszczędność, jaką daje fotowoltaika oraz to, że jest to ekologiczne źródło energii. Montaż paneli fotowoltaicznych na działce lub dachu domu ma jeszcze jedną zaletę – w przypadku sprzedaży nieruchomości podnosi jej wartość.
Apator SA we współpracy z TAURON Dystrybucja SA uruchomił magazyn energii służący do stabilizacji parametrów pracy sieci dystrybucyjnej niskiego napięcia. To kolejny projekt realizowany przez toruńskiego...
Apator SA we współpracy z TAURON Dystrybucja SA uruchomił magazyn energii służący do stabilizacji parametrów pracy sieci dystrybucyjnej niskiego napięcia. To kolejny projekt realizowany przez toruńskiego producenta dla krajowych Operatorów Sieci Dystrybucji, którzy poszukują skutecznych rozwiązań technicznych do bilansowania sieci oraz redukcji nadmiernych obciążeń w szczytach produkcji energii z odnawialnych źródeł.
Jak wykazano w różnych testach, nie tylko na uczelniach technicznych w Polsce, duży procent ograniczników przepięć (SPD) dostępnych na rynku nie spełnia parametrów deklarowanych w kartach katalogowych....
Jak wykazano w różnych testach, nie tylko na uczelniach technicznych w Polsce, duży procent ograniczników przepięć (SPD) dostępnych na rynku nie spełnia parametrów deklarowanych w kartach katalogowych. Dodatkowo w różnych materiałach marketingowych również można znaleźć nie zawsze pełne informacje na temat wymagań stawianych SPD, co nie pomaga w właściwym doborze odpowiedniego modelu do aplikacji. W tym artykule postaramy się przybliżyć najważniejsze zagadnienia, które pozwolą dobrać bezpieczne ograniczniki...
Wiele ostatnio mówi się o poprawie efektywności energetycznej oraz energii odnawialnej w kontekście redukcji gazów cieplarnianych i rosnących kosztów energii. W silnie konkurencyjnym otoczeniu przedsiębiorstwa...
Wiele ostatnio mówi się o poprawie efektywności energetycznej oraz energii odnawialnej w kontekście redukcji gazów cieplarnianych i rosnących kosztów energii. W silnie konkurencyjnym otoczeniu przedsiębiorstwa wykazują dużą determinację do zmian prowadzących do optymalizacji kosztów, co zapewnić ma im zachowanie przewagi konkurencyjnej, wynikającej np. z przyjętej strategii przewagi kosztowej.
Inteligentny dom często mylony jest z budynkiem pasywnym. Należy jednak pamiętać, że nie można tych dwóch pojęć stosować zamiennie. Samo zastosowanie smart home i innych komponentów automatyki nie czyni...
Inteligentny dom często mylony jest z budynkiem pasywnym. Należy jednak pamiętać, że nie można tych dwóch pojęć stosować zamiennie. Samo zastosowanie smart home i innych komponentów automatyki nie czyni z tradycyjnego domu budynku pasywnego. Niewątpliwie jednak należy pamiętać, że elementy automatyki budynkowej są składową pasywnych budowli i nawet zwykłe mieszkanie potrafią uczynić bardziej oszczędnym i ekologicznym.
Najnowsze przemysłowe drukarki etykiet stworzone zostały z myślą o profesjonalistach, dla których ważna jest jakość, niezawodność oraz trwałość tworzonych oznaczeń. P‑touch E100VP, P-touch E300VP i P-touch...
Najnowsze przemysłowe drukarki etykiet stworzone zostały z myślą o profesjonalistach, dla których ważna jest jakość, niezawodność oraz trwałość tworzonych oznaczeń. P‑touch E100VP, P-touch E300VP i P-touch E550WVP to przenośne i szybkie urządzenia, które oferują specjalne funkcje do druku najpopularniejszych typów etykiet. Urządzenia pozwalają na szybkie i bezproblemowe drukowanie oznaczeń kabli, przewodów, gniazdek elektrycznych, przełączników oraz paneli krosowniczych.
Ta witryna wykorzystuje pliki cookies do przechowywania informacji na Twoim komputerze. Pliki cookies stosujemy w celu świadczenia usług na najwyższym poziomie, w tym w sposób dostosowany do indywidualnych potrzeb. Korzystanie z witryny bez zmiany ustawień dotyczących cookies oznacza, że będą one zamieszczane w Twoim urządzeniu końcowym. W każdym momencie możesz dokonać zmiany ustawień przeglądarki dotyczących cookies. Nim Państwo zaczną korzystać z naszego serwisu prosimy o zapoznanie się z naszą polityką prywatności oraz Informacją o Cookies. Więcej szczegółów w naszej Polityce Prywatności oraz Informacji o Cookies. Administratorem Państwa danych osobowych jest Grupa MEDIUM Spółka z ograniczoną odpowiedzialnością Sp.K., nr KRS: 0000537655, z siedzibą w 04-112 Warszawa, ul. Karczewska 18, tel. +48 22 810-21-24, właściciel strony www.elektro.info.pl. Twoje Dane Osobowe będą chronione zgodnie z wytycznymi polityki prywatności www.elektro.info.pl oraz zgodnie z Rozporządzeniem Parlamentu Europejskiego i Rady (UE) 2016/679 z dnia 27 kwietnia 2016r i z Ustawą o ochronie danych osobowych Dz.U. 2018 poz. 1000 z dnia 10 maja 2018r.



![Fot. 1. Budowa enkodera typu LinACE [5]](https://www.elektro.info.pl/media/cache/typical_view/data/202002/pomiary-przesuniecia-i-kata-obrotu-wybrane-rozwiazania.jpg)

![Fot. 1. Budowa enkodera typu LinACE [5]](https://www.elektro.info.pl/media/cache/typical_view/data/201905/fot-1-6.jpg)
![Rys. 1. Przebieg sygnałów wyjściowych enkodera inkrementalnego [4]](https://www.elektro.info.pl/media/cache/typical_view/data/201905/rys-1-14.jpg)
![Rys. 2. Schemat ideowy przetwornika transformatorowego różnicowego [6]](https://www.elektro.info.pl/media/cache/typical_view/data/201905/rys-2-10.jpg)