Charakterystyka i zastosowania układów wykonawczych w systemach automatyki
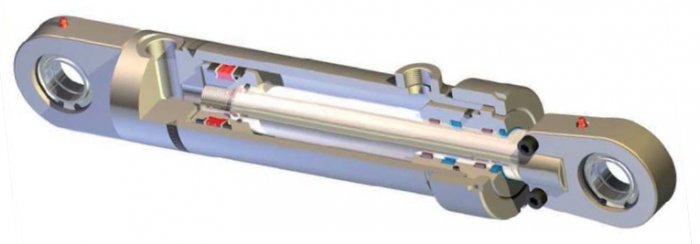
Przykład siłownika hydraulicznego
Układy automatyki są obecnie jednymi z najintensywniej rozwijanych systemów elektroniki i elektrotechniki. Ułatwiają one pracę zarówno instalacji przemysłowych, takich jak elektrownie, cukrownie, czy fabryki odzieży, jak i budynków komercyjnych, m.in. biurowców czy centrów handlowych. Pomimo że ogólna idea takiego systemu pozostaje niezmienna od kilkudziesięciu lat, wprowadzenie układów mikroprocesorowych oraz zaawansowanych technologii czujników i elementów wykonawczych pozwoliło znacząco rozszerzyć obszar ich zastosowań.
Zobacz także
AUTOMATION TECHNOLOGY Sp. z o.o. Automation Technology – nowy gracz na rynku

Automation Technology prężnie działa w obszarach energetyki, automatyki przemysłowej oraz robotyki.
Automation Technology prężnie działa w obszarach energetyki, automatyki przemysłowej oraz robotyki.
mgr inż. Dominik Trojnicz, dr hab. inż. Marcin Habrych, mgr inż. Justyna Herlender Wymagania stawiane automatyce zabezpieczeniowej i regulacyjnej inwerterów typu A
Obecny bardzo gwałtowny rozwój fotowoltaiki – nie tylko w Polsce, ale na całym terenie Unii Europejskiej (UE) – niesie za sobą dużo zalet, takich jak pozyskiwanie energii z praktycznie nieskończonej energii...
Obecny bardzo gwałtowny rozwój fotowoltaiki – nie tylko w Polsce, ale na całym terenie Unii Europejskiej (UE) – niesie za sobą dużo zalet, takich jak pozyskiwanie energii z praktycznie nieskończonej energii słonecznej oraz brak emisji szkodliwych gazów, co przyczynia się do redukcji emisji gazów cieplarnianych i zmniejszenia negatywnego wpływu na środowisko. Przyłączenie dużej liczby odnawialnych źródeł energii (OZE) nie pozostaje jednak bez wpływu na sieci elektroenergetyczne.
dr hab. inż. Marcin Habrych, mgr inż. Karol Świerczyński, dr inż. Bartosz Brusiłowicz Wymagania techniczne stawiane generacji rozproszonej w aspekcie elektroenergetycznej automatyki zabezpieczeniowej (część 2.)
Odpowiedzią na wymagania stawiane przez Kodeks Sieciowy jest opracowanie przez Polskie Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej (PTPiREE) na zlecenie Polskich Sieci Elektroenergetycznych (PSE)...
Odpowiedzią na wymagania stawiane przez Kodeks Sieciowy jest opracowanie przez Polskie Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej (PTPiREE) na zlecenie Polskich Sieci Elektroenergetycznych (PSE) „Wymogów ogólnego stosowania wynikających z Rozporządzenia Komisji (UE) 2016/631 z dnia 14 kwietnia 2016 r., ustanawiającego Kodeks Sieci dotyczący wymogów w zakresie przyłączenia jednostek wytwórczych do sieci (NC RfG)” [4], opublikowanych w roku 2018.
StreszczenieW artykule przedstawiono elementy wykonawcze układów automatyki zarówno przemysłowej, jak i komercyjnej (stosowanej np. w domu inteligentnym). Scharakteryzowano system pomiarowo-kontrolny i jego znaczenie w automatyce. Następnie zdefiniowano i sklasyfikowano elementy wykonawcze zarówno pod względem zasady działania, jak i zastosowań. Szczegółowo omówiono poszczególne grupy urządzeń, kładąc nacisk na ich wady i zalety. Przedstawiono także przykładowy system wykorzystujący tego typu elementy.AbstractCharacteristics and applications of actuators in automated control systemsThe paper presents the main categories of the actuators applied in both industry installations and home facilities (including the smart house technology). The distributed measurement and control system as the main structure exploiting the actuators is first introduced. Then the main classes of actuators are described, including electrical, pneumatic and hydraulic groups. Each category is discussed in detail, focusing on its work regime, requirements, physical parameters and applications. Finally, the application example is presented, where particular functions of the selected elements of the whole system and actuators are shown. |
System pomiarowo-sterujący
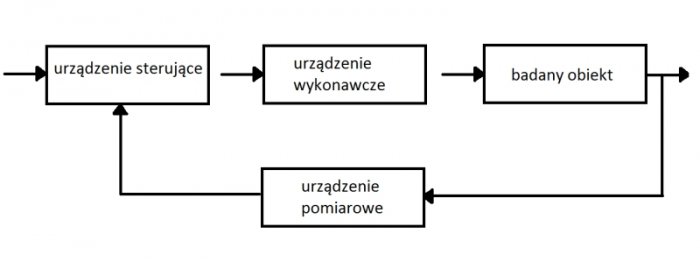
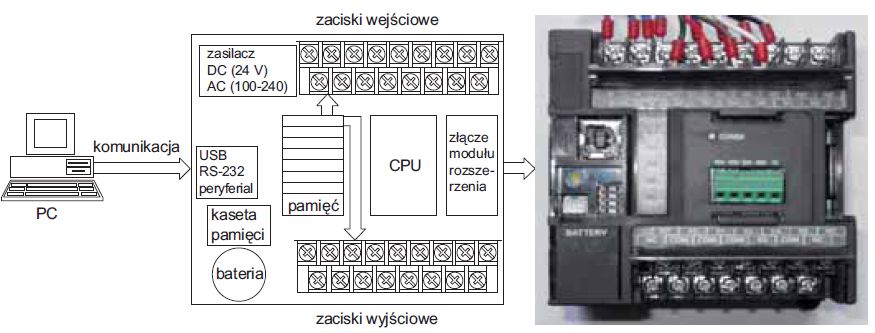
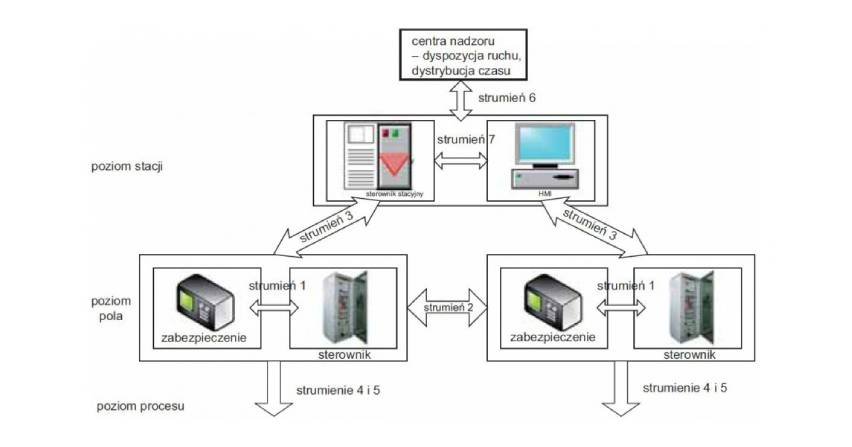
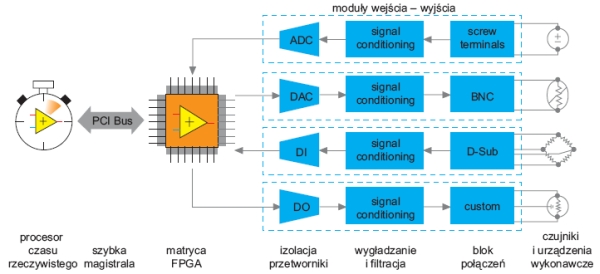
Elementy wykonawcze są częścią większego systemu, związanego z automatycznym sterowaniem obiektem lub procesem [1]. Jego zadaniem jest nieustanne kontrolowanie stanu oraz wpływanie na zmiany zgodnie z zadanym algorytmem. W przypadku procesów przemysłowych najczęściej celem działania jest utrzymanie parametrów procesu w granicach ustalonych przez projektanta. Niezbędną czynnością jest pobieranie danych pomiarowych z węzłów obiektu, które następnie są przetwarzane przez system mikroprocesorowy (obecnie mikrokontroler lub sterownik PLC). W efekcie do elementów wykonawczych wysyłane są sygnały elektryczne służące do wymuszenia zmian w obiekcie. Schemat systemu przedstawia rysunek 1.
Najczęściej działanie systemu pomiarowo-sterującego związane jest z przetwarzaniem sygnałów elektrycznych na inne wielkości fizyczne, charakterystyczne dla badanego obiektu. Z tego względu konieczne jest projektowanie nierzadko skomplikowanych urządzeń zamieniających sygnały z modułu sterującego na wielkości właściwe dla obiektu (np. strumień cieczy, powietrza itp.). Urządzenie sterujące jest zwykle realizowane w postaci regulatora PID (proporcjonalno-całkująco-różniczkującego), który jest w stanie reagować na zmiany aktualne, przeszłe oraz przyszłe.
W celu pozyskania informacji o obiekcie konieczne jest zastosowanie czujnika lub przetwornika pomiarowego, czyli układu zamieniającego wielkość nieelektryczną (temperaturę, ciśnienie, poziom cieczy itp.) na proporcjonalny do niej sygnał elektryczny (w przypadku czujników inteligentnych jest to nawet sygnał cyfrowy, przystosowany do przetwarzania przez mikroprocesor, ewentualnie po uprzednim przesłaniu siecią komputerową).
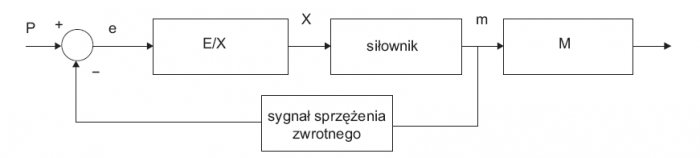
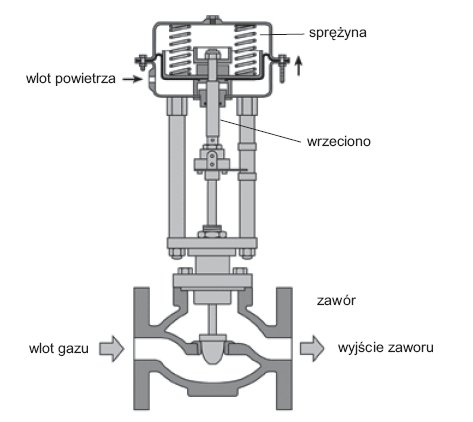
W przypadku elementu wykonawczego zachodzi zależność odwrotna – na podstawie sygnału elektrycznego generowanego z inicjatywy mikroprocesora generowany jest proporcjonalny sygnał wielkości (najczęściej) nieelektrycznej. Ponieważ przeważnie związany jest on z działaniem siły, elementy takie nazywa się siłownikami. Przykładem takiego układu jest siłownik pneumatyczny sterujący zaworem kontrolującym przepływ gazu w przewodzie. Schemat blokowy elementu wykonawczego przedstawiono na rysunku 2.
Sygnał ze sterownika p służy do wymuszania sygnału sterującego e dla siłownika. Ponieważ ten ostatni może oddziaływać na otoczenie za pomocą różnej wielkości fizycznej x (np. gazu lub cieczy), konieczna jest wcześniejsza konwersja sygnału elektrycznego. Siłownik wymusza działanie wielkości bezpośrednio oddziałującej na otoczenie m przez układ M (może to być zawór, zasuwa itp.). Pomimo iż w niektórych źródłach wprowadza się pojęcia urządzenia wykonawczego jako złożonego z elementu wykonawczego oraz zasilającego go elementu napędowego, w artykule oba pojęcia będą traktowane zamiennie. Część elementów wykonawczych ma strukturę uproszczoną, ponieważ sterowanie odbywa się wyłącznie w obrębie sygnałów elektrycznych (jak np. w tyrystorach) [2].
Charakterystyka elementów wykonawczych
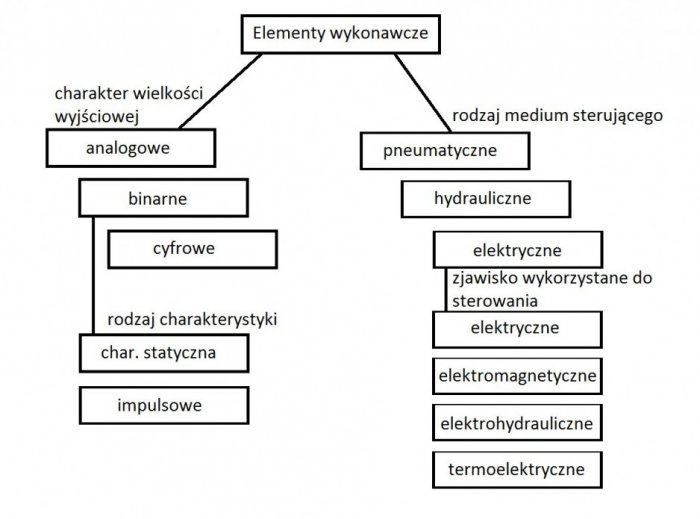
Istnieje kilka grup urządzeń, klasyfikowanych ze względu na zjawisko fizyczne wykorzystywane do wytworzenia siły potrzebnej do oddziaływania na obiekt. Inna taksonomia obejmuje charakter sygnału generowanego przez element wykonawczy (rys. 3). Najczęściej spotykane są układy analogowe, które powodują stopniową zmianę sygnału sterującego (tak jest w przypadku układów regulujących poziom cieczy w zbiorniku poprzez stopień odkręcenia zaworu kontrolującego jej przepływ).
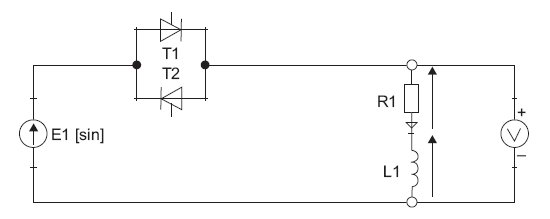
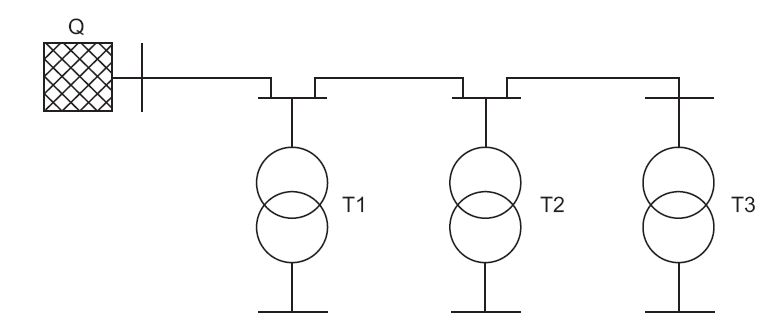
Innym przykładem jest serwomechanizm odpowiedzialny za poruszanie ramieniem robota przemysłowego w fabryce samochodów. Do takich elementów zaliczane są sterowniki tyrystorowe, które odpowiadają za poziom napięcia stałego. Z tego powodu wykorzystywane są one np. w układach automatycznego sterowania silnikami prądu stałego. Schemat tyrystora przedstawia rysunek 4. W ogólności jest to układ rezystancyjno-indukcyjny, jednak stosowane są również wersje uproszczone, o charakterze rezystancyjnym.
Niezwykle popularne są elementy dwustanowe, służące zwykle do włączania i wyłączania mechanicznego. Ich przeznaczenie zależy od tego, czy są to układy o charakterystyce statycznej, czy też impulsowe. Do pierwszej grupy zaliczają się elektroprzekaźniki (ang. electrical relays) oraz styczniki (stosowane w silnikach prądu stałego, gdzie potrzebne są duże napięcia), a także elektromagnesy (stanowiące układy otwierające i zamykające drzwi, np. na klatce schodowej).
Do drugiej kategorii należą wzmacniacze silników krokowych, a także liczniki elektromagnetyczne. Ostatnia kategoria obejmuje wyjściowe sygnały cyfrowe, stosowane w niektórych regulatorach (np. w układzie kontrolującym diody elektroluminescencyjne za pomocą bramek logicznych MOS).
Innym podziałem, dużo bardziej interesującym ze względu na zastosowania praktyczne, jest charakteryzacja układów ze względu na rodzaj zmienianej wielkości fizycznej. Wyróżnia się tu trzy główne grupy: elementy pneumatyczne (oddziałujące na otoczenie dzięki ciśnieniu powietrza lub innego gazu w cylindrze), hydrauliczne (wymagające do pracy cieczy) oraz elektryczne (lub elektromagnetyczne), wykorzystujące do pracy napięcie (ewentualnie w połączeniu ze strumieniem pola magnetycznego). W dalszej części artykułu poszczególne grupy zostaną opisane bardziej szczegółowo, z uwzględnieniem ich obszarów zastosowań.
Współczesne elementy wykonawcze w układach automatyki charakteryzują się powszechnie zdolnością do komunikacji przy użyciu odpowiedniego medium (najczęściej jest to sieć komputerowa), potrafią dostosować się do właściwości procesu, na który oddziałują (przejawiając zdolności adaptacyjne), w większości przypadków mają również wbudowane proste elementy diagnostyczne, pozwalające np. na sygnalizowanie przekroczenia wartości krytycznej parametru, na który element wykonawczy oddziałuje. Ich stosowanie w przemyśle oznacza konieczność spełniania szeregu norm, np. odnośnie odporności na zakłócenia pochodzące od pola elektromagnetycznego, fale radiowe czy zaniki zasilania. Określają to normy, np. IEC 61000-4-3, czy IEC 61000-4-8.
Elementy pneumatyczne
Elementy te, najczęściej występujące jako siłowniki pneumatyczne, wytwarzają siłę dzięki ciśnieniu gazu przepływającego przez układ wykonawczy. Są one najczęściej wykorzystywane jako siłowniki sterujące zaworami lub przepustnicami, od sygnału generowanego przez nie zależy zatem intensywność ruchu postępowego (liniowego) lub obrotowego. Występują dość często w przemyśle lekkim, np. spożywczym, w maszynach pakujących lub sortujących. W najczęściej występujących modelach uzyskiwana siła jest rzędu pojedynczych N do kN (co zależy również od wielkości elementu). W przypadku, gdy konieczne są większe siły, na ogół stosuje się siłowniki hydrauliczne (choć istnieją odpowiednio duże odpowiedniki pneumatyczne, są jednak stosunkowo drogie).
Siłownik pneumatyczny występuje najczęściej w dwóch odmianach: tłokowej (ang. piston) oraz membranowej (ang. diaphragm) [3]. Różnica między nimi związana jest z przesunięciem, które może zostać wymuszone przez siłownik. Zwykle tłok ma większe możliwości pod tym względem, wytrzymuje również wyższe ciśnienia. Rozmiary takich siłowników są mniejsze, niż w przypadku siłowników membranowych, pracują również z większymi prędkościami. W obu przypadkach konieczny jest element ruchomy oparty na sprężynach, które są ściskane lub rozciągane przez strumień gazu. Schemat siłownika pneumatycznego przedstawia rysunek 5.
Siłownik może pracować w trybie prostym lub odwróconym. Wybór między nimi decyduje o tym, czy po ustaniu siły (związanej z ciśnieniem gazu), np. w wyniku awarii zasilania, zawór zostaje zamknięty, czy otwarty. W pozycji neutralnej sprężyna tłoka lub membrany jest rozciągnięta. Po naciśnięciu gazu na tłok lub membranę wykonana zostaje praca związana z otwarciem lub zamknięciem zaworu lub zasuwy. W trybie prostym pracy (tzw. NO – Normalnie Otwarty), sprężyna podwieszona jest pod górną ściankę siłownika. Oznacza to zamknięcie zaworu po ustaniu siły nacisku (ponieważ rozciągnięcie sprężyny przez siły grawitacji powoduje opadnięcie tłoka).
W konfiguracji odwróconej (tzw. NZ – Normalnie Zamknięty), sprężyna jest przyczepiona do dolnej ścianki siłownika. Wówczas nacisk gazu na tłok lub membranę powoduje przesunięcie go w dół, co oznacza zamknięcie, zatem w pozycji neutralnej zawór jest otwarty. Posiadając precyzyjne źródło gazu można dokładnie sterować przesunięciem sprężyny (często stosuje się wartości pomiędzy 0.2 bara dla sprężyny w pozycji neutralnej i 1 bara przy jej maksymalnym ściśnięciu). Siłownik musi być kalibrowany zarówno po wyprodukowaniu, jak i po użytkowaniu przez określony czas. Odchylenia od wartości skrajnych (co może zdarzyć się np. kiedy siłownik pracuje w warunkach środowiskowych innych od panujących podczas kalibracji) powodują przesunięcie zakresu obsługiwanego ciśnienia, co z kolei powoduje, że sterowanego zaworu nie da się całkowicie zamknąć lub otworzyć [4].
Dodatkowo podczas sterowania pracą zaworu trzeba brać pod uwagę tarcie, co przyczynia się do powstawania pętli histerezy (tzn. położenie tłoku w siłowniku zmienia się w zależności od tego, w którą stronę się on przesuwa). W celu jej zmniejszenia lub eliminacji stosuje się układy pozycjonowania (ang. positioners).
Jeżeli siłownik pneumatyczny jest sterowany przez mikroprocesor, konieczne jest zastosowanie układu zamieniającego sygnał elektryczny na ciśnienie gazu oddziałującego na element aktywny (membranę lub tłok). W tym celu stosuje się przetworniki elektropneumatyczne. Możliwe jest również zastosowanie siłownika elektrycznego (przełącznika) do sterowania zaworem (układy takie nazywane są silnikami zaworowymi – Valve Motor Drive). Pracują one jako przełączniki (zasilane stało- lub zmiennoprądowo), mogące przyjmować trzy stany: otwarcie, zamknięcie oraz brak akcji.
Elementy pneumatyczne konstruowane są z odlewów stali nierdzewnej lub chromowanej, ew. aluminium. Alternatywnie stosuje się mosiądz, stal z domieszką brązu itp.
Elementy hydrauliczne
Urządzenia takie charakteryzują się podobnymi właściwościami, jak ich pneumatyczne odpowiedniki. Główna różnica to medium powodujące powstawanie siły. Zamiast gazów używa się tutaj tzw. cieczy manometrycznych (co wymaga również stosowania dodatkowych środków ochronnych przed powstaniem rdzy). Zmiana ciśnienia w komorze siłownika powoduje przemieszczenie elementu roboczego, co z kolei powinno wywołać pożądany efekt (np. otwarcie zaworu lub przemieszczenie tłoka). Dzięki zastosowaniu cieczy możliwe jest uzyskanie znacznie większych ciśnień, niż w przypadku siłowników pneumatycznych. Co za tym idzie, wytwarzane siły są również znaczniejsze (nawet rzędu tysięcy kN).
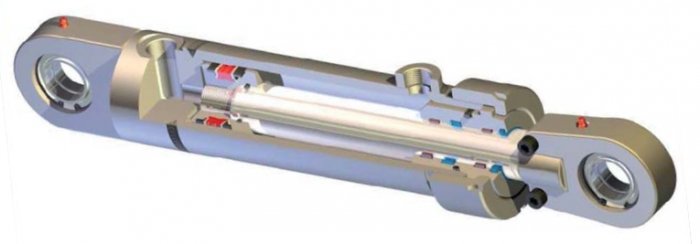
Siłowniki hydrauliczne (nazywane także cylindrami hydraulicznymi) zawierają element roboczy, tj. tłok, nurnik lub membranę umieszczone w okrągłej rurze (cylindrze). Element roboczy powoduje przesunięcie tzw. tłoczyska pod wpływem nacisku płynu. Istnieją tu dwa rodzaje urządzeń: siłowniki jednostronnego i dwustronnego działania. W tych pierwszych tłok pod wpływem cieczy przesuwa się tylko w jednym kierunku, w drugich możliwe jest przesuwanie go w obu kierunkach. Siłowniki zabezpieczane są przed wpływem niekorzystnych czynników zewnętrznych (powodujących np. korozję) specjalnymi rodzajami materiałów, z których wykonywane są obudowy oraz części ruchome. Najczęściej są to stal nierdzewna, z brązem, chromowana lub materiał zawierający elementy grafitowe. W przypadku obudowy może to być również aluminium.
Siłowniki hydrauliczne mogą mieć znaczące rozmiary (nawet do kilkunastu metrów), co umożliwia ich zastosowanie w dużych maszynach rolniczych, dźwigach, windach, przekaźnikach ciśnienia itp. urządzeniach. Wobec konieczności zwiększenia zasięgu stosuje się także siłowniki teleskopowe. Przykładowy siłownik hydrauliczny przedstawia rysunek 6. Cechą charakterystyczną takich urządzeń jest również mała szybkość działania, co jednak rzadko jest istotnym parametrem utrudniającym wykorzystanie ich w przemyśle [5] lub na budowie. Ze względu na wysokie parametry są to urządzenia drogie.
Elementy elektryczne
Jest to bardzo szeroka grupa urządzeń, preferowana, jeżeli konieczna jest komunikacja z licznymi układami mikroprocesorowymi. Opisane powyżej rodzaje siłowników mogą (do pewnego stopnia) zostać zastąpione przez ich odpowiedniki sterowane przez przepływ prądu. Ze względu na efekt działania dzieli się je zwykle na cztery kategorie: elektryczne, elektromagnetyczne, elektrohydrauliczne (w których prąd płynący przez układ steruje przepływem cieczy) oraz termoelektryczne (czyli elektryczne sterowanie grzejnikami i grzałkami, stosowane np. w domu inteligentnym). Różnica między nimi polega na wykorzystaniu medium realizującego siłę wymuszającą.
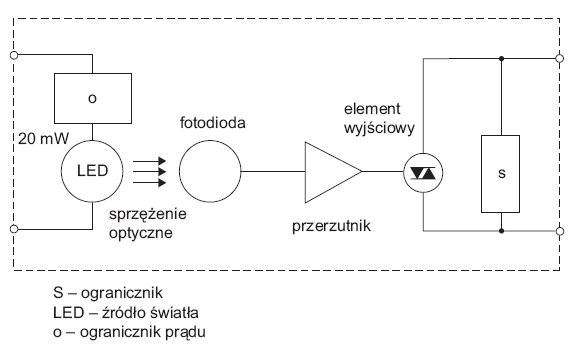
Podstawowe rodzaje elektrycznych elementów wykonawczych to przekaźniki i styczniki. Ich zasada działania jest podobna, różnica leży zaś w napięciach, którymi sterują. W obu urządzeniach chodzi o sterowanie obciążeniem prądowym o wysokich napięciach lub natężeniach prądów. Elementy są podzielone na dwa obwody elektryczne: sterujący (czyli przełącznik elektromagnetyczny) i przełączania (podłączony do obciążenia). Obwody są odseparowane galwanicznie, tzn. nie ma między nimi połączenia elektrycznego, jednak mogą wymieniać energię za pomocą innego zjawiska fizycznego. W przypadku przekaźników półprzewodnikowych (SSD) jest to fotodioda, fototranzystor, fototyrystor lub podobny element optoelektroniczny [6]. Element taki jest częścią obwodu sterującego, podczas gdy w obwodzie przełączania znajduje się fotodetektor, którego zadaniem jest wykrywanie światła pochodzącego z tego pierwszego. Schemat przekaźnika pokazano na rysunku 7.
W stanie neutralnym (spoczynku) nie płynie przezeń prąd, zatem obwód przełączania nie oddziałuje na otoczenie. Po włączeniu następuje przewodzenie prądu przez obciążenie, w wyniku czego dochodzi do wykonania pracy na nim. Użycie elementu optoelektronicznego zapewnia dużą częstotliwość wyłączania, jest to również rozwiązanie trwałe. Zakres napięć wykorzystywanych do zasilania przekaźników jest szeroki.
Stosowane może być zarówno napięcie stałe (do 32 V), jak i przemienne (od 90 V do 280 V), w zależności od przeznaczenia oraz instalacji elektrycznej w budynku. Warunki, w których następuje włączenie przekaźników pozwalają na następującą kategoryzację:
- załączające w zerze – gdy włączenie następuje po przejściu sygnału zasilającego przez zero,
- załączające natychmiast – gdy włączenie następuje po pojawieniu się sygnału zasilającego,
- załączające w szczycie – gdy włączenie następuje po uzyskaniu przez sygnał zasilający maksimum amplitudy,
- załączające analogowo – tutaj włączenie następuje stopniowo, proporcjonalnie do poziomu sygnału sterującego.
Opisane przekaźniki stosowane są np. do sterowania oświetleniem, ogrzewaniem, czy transformatorami.
Przekaźniki elektromechaniczne wykorzystują zasadę indukcji elektromagnetycznej. Element składa się obwodu elektrycznego, w którym występuje cewka (solenoid) lub elektromagnes. Jest to materiał ferromagnetyczny, wokół którego nawinięty jest przewód przewodzący prąd. W momencie pojawienia się tego ostatniego, dookoła rdzenia indukowane jest pole magnetyczne, które oddziałuje na element mechaniczny, przyciągając go lub zmuszając do przemieszczenia. W ten sposób działają zamki elektromagnetyczne.
W zależności od rodzaju ruchu wymuszanego przez przekaźnik, rozróżnia się urządzenia liniowe lub obrotowe. W przekaźnikach liniowych nurnik (grzybek lub sworzeń) przemieszczany jest wzdłuż linii prostej. W zależności od tego, czy jest to element typu pchanego (ang. push), czy ciągnionego (ang. pull), umocowany jest on na sprężynie albo wewnątrz, albo na zewnątrz uzwojenia. W pierwszym wypadku po pojawieniu się prądu w uzwojeniu, indukowane pole magnetyczne powoduje wypchnięcie nurnika, w drugim – przyciągnięcie do uzwojenia. Sterowanie przekaźnikiem elektrycznym jest realizowane poprzez obecność tranzystora przełączającego lub MOSFET [7].
Przekaźniki obrotowe są rzadziej spotykane. Zapewniają obrót magnesu wokół własnej osi o wybraną wartość kątową (zwykle do 90 stopni). Obrót możliwy jest w dwóch kierunkach. Sterowanie ruchem magnesu odbywa się poprzez doprowadzenie prądu o odpowiedniej wartości i zwrot do uzwojenia umocowanego wokół stalowej tzw. ramy (ang. frame). Dzięki takiej budowie elementy elektromechaniczne obrotowe są stosowane zamiast małych silników stałoprądowych (np. do zasilania modeli samochodów, w automatach do gier, czy elektrycznych maszynach do pisania). Ze względu na nieduży zakres napięć wykorzystywany w elementach (kilkanaście wolt), układy takie są również stosowane w obwodach pomocniczych i sygnalizacyjnych, np. w dużych silnikach w elektrowniach.
Wersją przekaźnika elektromagnetycznego przeznaczoną dla wysokich napięć i prądów o dużym natężeniu jest stycznik. Również wyposażono go w elektromagnes, jest to jednak element znacznie większy, niż w przypadku przełącznika. Prąd płynący przezeń powoduje przyciąganie zwory, dzięki czemu dochodzi do przepływu prądu przez wybraną sekcję obwodu przełączającego. Także tutaj stosowane są wersje styczników dla prądu stałego i przemiennego. Pierwszy rodzaj stosowany jest w trakcjach kolejowych i tramwajowych, a także w wózkach akumulatorowych. Drugi typ styczników wykorzystuje się w zasilaniu silników indukcyjnych lub urządzeń grzewczych.
Oprócz przedstawionych, typowych rodzajów elementów wykonawczych, coraz częściej stosowane są także nowe rodzaje materiałów, np. charakteryzujące się efektem piezoelektrycznym. W wyniku odkształcenia materiału (pod wpływem siły nacisku), powstaje pole elektryczne (wskutek przemieszczenia ładunków w jonowej sieci krystalicznej). Istnieje również odwrotny efekt piezoelektryczny, tzn. przepływ prądu przez materiał powoduje zmianę jego kształtu, co pozwala na wymuszanie przezeń przemieszczenia lub obrotu. Efekt piezoelektryczny wymaga asymetrycznej struktury kryształu (np. w kwarcu SiO2).
Najczęściej stosowane materiały do tego celu to ceramika, np. cyrkonian ołowiu PZT (roztwór PbZrO3 i PbTiO3), lub tytanian baru (BaTiO3). Proces odkształcenia materiału pod wpływem przyłożonego napięcia jest nieliniowy, ponadto charakteryzuje się histerezą (co również jest niekorzystne), wymaga też stosunkowo wysokich napięć zasilających (nawet do 1 kV). Do zalet siłowników piezoelektrycznych należy prosta struktura elementu, szybkie działanie oraz wysoka wytrzymałość. Podobnie jak w przypadku elementów elektromagnetycznych, rozróżnia się tutaj siłowniki liniowe i obrotowe. W tym pierwszym przypadku konstruuje się tzw. elementy stosowe (ang. stack), które składają się z pewnej liczby warstw materiału piezoelektrycznego [8].
Problemem może być odchylenie od przemieszczenia w linii prostej, co wymaga zastosowania kompensacji. Odkształcenia są również niewielkie (rzędu ułamków procenta), co wymaga stosowania wzmacniaczy lub struktur hybrydowych (np. systemów hydraulicznych). Tego typu układy są stosowane jako silniki liniowe lub np. kleszcze w robotyce. Innym zastosowaniem są układy zginające. Najbardziej przyszłościowe zastosowania elementów piezoelektrycznych są przewidywane w strukturach MEMS (ang. Micro-Electro-Mechanical Systems) [9] oraz w małych robotach wykonujących precyzyjne zadania (medycyna, zastosowania wojskowe itp.).
Przykład zastosowania
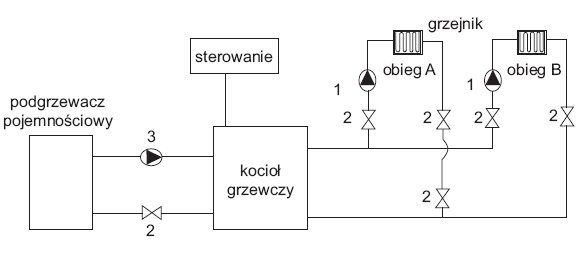
Jednym z istotnych zastosowań układów wykonawczych są procesy przemysłowe, w których liczba elementów wykonawczych jest proporcjonalna do skali procesu. Przykładem może być węzeł ciepłowniczy kotłowni, w którym następuje ogrzanie lub ochłodzenie cieczy dostarczanej do pomieszczeń użytkowników budynku. Gotowe systemy kotłowni dostarczane są przez szereg firm, np. De Dietrich [10]. Podstawowymi elementami wykonawczymi w nich stosowanymi są pompy obiegów kotła i grzewczych, a także pompy cyrkulacyjne. Są to urządzenia sterowane automatycznie i decydujące o ilości wody przepływającej przez poszczególne obwody.
Medium transportującym ciepło z kotłów do grzejników jest woda, która w pierwotnym obiegu jest podgrzewana, potem zaś przenoszona do obiegu grzewczego. Istotną rolę odgrywają także zawory, które pozwalają na dołączanie lub odcinanie fragmentów obiegów od całości systemu. Pełnią one funkcję zabezpieczeń – w przypadku awarii automatycznie odcinają uszkodzony fragment. Zawory stosowane w kotłowni są jedno- lub trójdrogowe. Pierwsze pełnią funkcje zabezpieczające (odcinające dostęp do poszczególnych fragmentów obiegu) Drugie stosuje się jako rozdzielające (przekierowujące strumień cieczy do odpowiedniego obiegu) lub mieszające (pozwalające połączyć ciecz płynącą z dwóch kierunków). Zaworami sterują siłowniki, zaś kontrola pomp odbywa się za pomocą silników.
Podsumowanie
Elementy wykonawcze pełnią istotną rolę we współczesnych systemach sterowania. Z jednej strony pozwalają oddziaływać mikroprocesorom na środowisko zewnętrzne (co dotyczy zarówno dużych instalacji przemysłowych, jak i budynków mieszkalnych). Z drugiej dzięki wbudowanych obwodom elektrycznym potrafią komunikować się z każdym rodzajem sterownika układu automatyki. Zadaniem projektanta systemu jest wybranie odpowiednich elementów, dopasowanych do przewidywanych zadań. I tak w zastosowaniach przemysłowych, gdzie potrzebne są duże siły, potrzebne będą siłowniki hydrauliczne. W instalacjach produkcyjnych o średnich wymaganiach na siłę (rzędu pojedynczych kN) sprawdzają się siłowniki pneumatyczne.
Ze względu na konieczność współpracy ze zautomatyzowanymi układami sterującymi, tego typu elementy mają zwykle układy pozwalające dokonać konwersji sygnału elektrycznego na inną wielkość fizyczną, np. strumień cieczy. W pozostałych przypadkach, tzn. gdy wymagana siła jest poniżej kN lub liczy się mały rozmiar elementu, stosowane są siłowniki elektryczne. Są one szczególnie przydatne w infrastrukturze inteligentnego domu oraz robotyce. Wykorzystywane są nie tylko w precyzyjnych, autonomicznych robotach, ale również zastosowaniach amatorskich i w badaniach naukowych.
Interesującym kierunkiem rozwoju są układy miniaturowe, wymagające użycia materiałów nowego rodzaju, takich jak wykorzystujące efekt piezoelektryczny materiały ceramiczne, czy też stopy z pamięcią kształtu. Ich stosowanie pozwala na budowanie zaawansowanych układów o ograniczonych rozmiarach oraz wysokim stopniu automatyzacji, co może przyczynić się do przyspieszenia rozwoju cywilizacyjnego, tym razem w skali mini i mikro.