Zastosowanie wykładników Lapunowa do badania stabilności sieci elektroenergetycznej

Artykuł przedstawia możliwość zastosowania wykładników Lapunowa jako kryterium stabilności systemu elektroenergetycznego.
Rys. Elektro.Info
Do najpoważniejszych awarii w pracy systemu SEE należy utrata stabilności. Zgodnie z zasadą, że „lepiej zapobiegać niż leczyć”, lepiej jest zapobiegać tego typu awariom niż naprawiać ich skutki. W tym celu konieczne jest wczesne zidentyfikowanie możliwości wystąpienia takiej awarii. Dlatego celem niniejszego artykułu jest zwrócenie uwagi na możliwość wykorzystania do analizy pracy SEE stosunkowo nowego narzędzia matematycznego, jakim są wykładniki Lapunowa.
W analizowanym zagadnieniu istotne jest to, że w czasie normalnej pracy SEE wykładnik Lapunowa ma wartość ujemną, natomiast w punkcie utraty stabilności jego wartość przekracza zero. Oznacza to, że w miarę zbliżania się układu do punktu utraty stabilności wykładnik Lapunowa zbliża się do zera.
Tę właściwość można wykorzystać do wczesnego wykrywania groźby utraty stabilności przez SEE. W artykule przedstawiono to na przykładzie prostego modelu generator-sieć sztywna.
Definicja wykładników Lapunowa
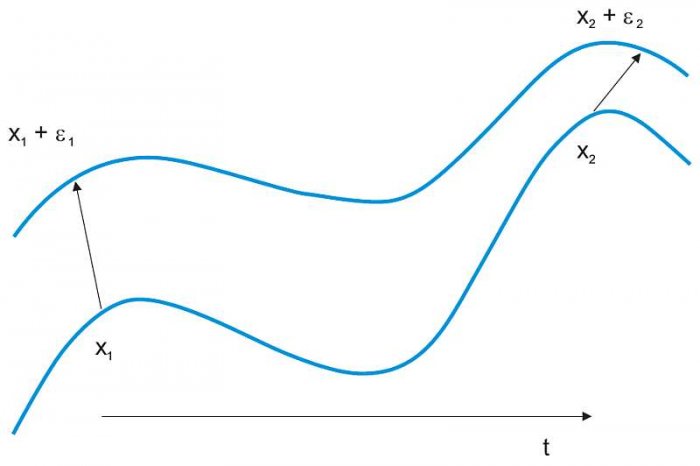
Interpretację graficzną wykładnika Lapunowa (Lyapunov exponent) przedstawiono na rys. 1.
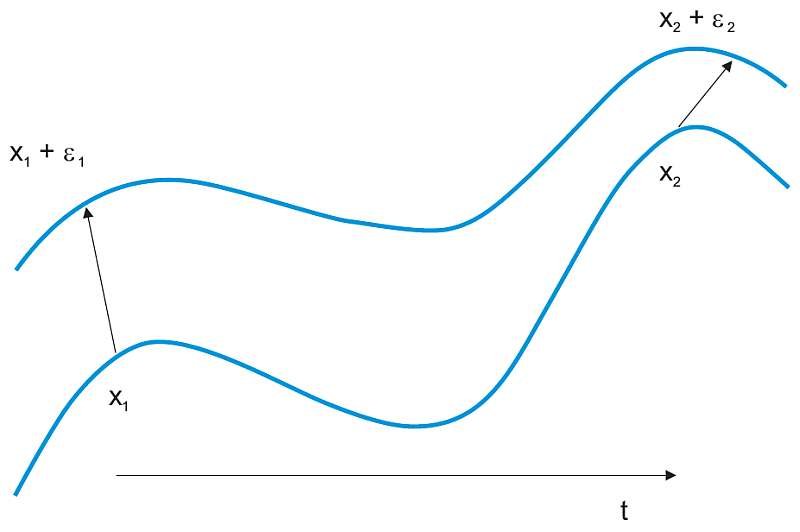
Rys. 1. Graficzna interpretacja wykładnika Lapunowa; rys. O. Małyszko
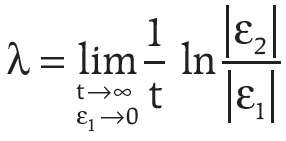
W chwili t1 układ dynamiczny znajduje się w punkcie X1. Jeśli w tym momencie nastąpi niewielkie zaburzenie, to układ znajdzie się w punkcie X1+ε1 (czyli będzie w niewielkiej odległości ε1 od układu niezaburzonego). Po pewnym czasie t układ niezaburzony znalazłby się w punkcie X2, natomiast układ zaburzony znajdzie się w punkcie X2+ε2. Wykładnik Lapunowa dla funkcji z czasem ciągłym (potoku) definiuje zależność (1) (należy zaznaczyć, że wzór (1) można wyprowadzić w ścisły matematyczny sposób, natomiast przedstawiona interpretacja jest używana, aby pominąć to niezbyt łatwe matematyczne wyprowadzenie):
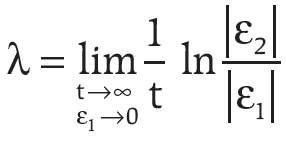
Wzór 1
Jeśli z biegiem czasu zaburzenie maleje (|ε2| < |ε1|), to zgodnie ze wzorem (1), wykładnik Lapunowa jest mniejszy od zera. Jeśli odległość między trajektorią zaburzoną a niezaburzoną się nie zmienia (|ε2| = |ε1|), to wykładnik jest równy zeru. Natomiast jeśli zaburzenie rośnie z biegiem czasu, to wykładnik jest dodatni.
Wynika z tego, że jeśli układ dynamiczny jest lekko zaburzony, to wykładnik Lapunowa opisuje prędkość, z jaką to zaburzenie zmienia się w czasie. Zgodnie z zależnością (1) wielkość zaburzenia po czasie t można opisać zależnością |ε2| ≈ |ε1|eλt.
Jeśli wykładnik Lapunowa jest mniejszy od zera, to zaburzenie będzie malało do zera, czyli startując z dwóch początkowo różnych punktów układ dynamiczny po pewnym czasie osiągnie to samo rozwiązanie. W przeciwnym przypadku, gdy wykładnik jest większy od zera, to zaburzenie będzie rosło i startując z dwóch początkowo bliskich punktów trajektorie będą się coraz bardziej rozbiegać.
Dzięki takiej właściwości za pomocą wykładników Lapunowa można określić stabilność układu dynamicznego.
Zależność (1) opisuje wykładnik Lapunowa dla funkcji z czasem ciągłym.
Podobnie definiuje się wykładnik dla odwzorowania jednowymiarowego (kaskady) (2):
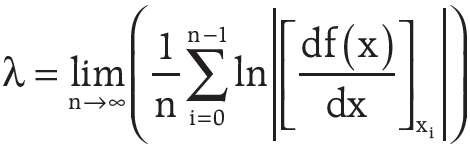
Wzór 2
Liczba wykładników Lapunowa
Układ dynamiczny ma tyle wykładników Lapunowa, ile ma stopni swobody. Natomiast liczba stopni swobody jest to najmniejsza liczba niezależnych zmiennych potrzebnych do jednoznacznego opisania stanu układu.
Wynika z tego, że układy jednowymiarowe mają jeden wykładnik, natomiast układy wielowymiarowe mają ich odpowiednio więcej. W praktyce natomiast często analizuje się tylko jeden, zazwyczaj największy wykładnik Lapunowa, co może mylnie sugerować, że każdy układ ma tylko jeden wykładnik.
Zastosowanie wykładników Lapunowa do klasyfikacji układów dynamicznych
Jak wcześniej wspomniano, każdy układ dynamiczny ma tyle wykładników Lapunowa, ile ma stopni swobody, czyli w zasadzie tyle, ile zmiennych opisuje ten układ.
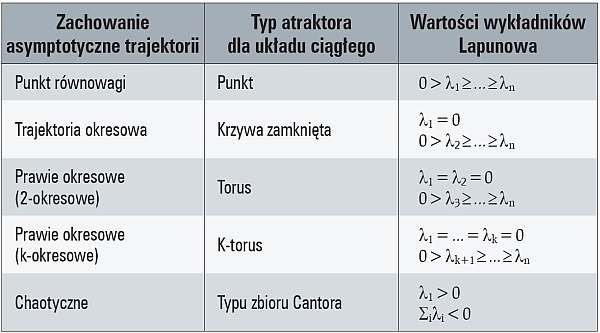
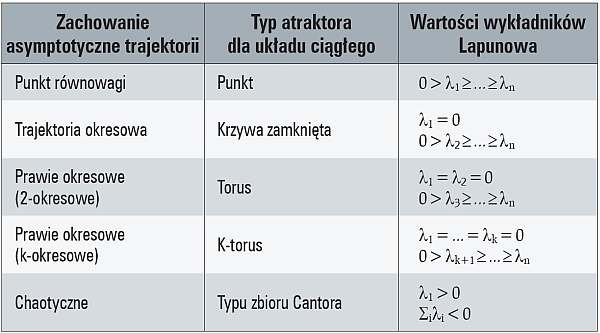
Tab. 1. Klasyfikacja atraktorów
Jeśli każdej zmiennej przyporządkujemy oś w układzie współrzędnych, to każdy wykładnik Lapunowa jest miarą rozbiegania się trajektorii wzdłuż danej osi. Pomiędzy wykładnikami Lapunowa a typem atraktora istnieje ścisły związek (atraktor jest to zbiór w przestrzeni fazowej, do którego zmierzają trajektorie rozpoczynające się w różnych punktach przestrzeni fazowej). W tab. 1. przedstawiono wartości wykładników Lapunowa dla odpowiednich typów atraktorów.
Z tab. 1. wynika, że jeśli rozwiązaniem układu dynamicznego jest punkt stały, to wszystkie wykładniki Lapunowa tego układu są mniejsze od zera. Jeśli rozwiązanie jest w postaci krzywej zamkniętej (np. okrąg), to jeden wykładnik jest równy zero, a pozostałe są mniejsze od zera itd. Wynika z tego również, że jeśli dla pewnej wartości parametru kontrolnego dany układ ma rozwiązanie w postaci punktu, a dla innej wartości inny typ atraktora, np. krzywa zamknięta, to największy wykładnik Lapunowa, wraz ze zmianą wartości parametru kontrolnego, będzie się zmieniał od wartości ujemnych do zera. W dalszej części artykułu pokazano, że tę właściwość można wykorzystać jako kryterium stabilności SEE.
Wyznaczanie wykładników Lapunowa
Analitycznie, zgodnie ze wzorami (1) lub (2), udaje się wyznaczyć wykładnik Lapunowa jedynie dla nielicznych odwzorowań jednowymiarowych. Na przykład, dla odwzorowania trójkątnego:
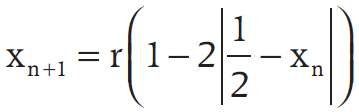
wynosi on λ = ln(2r).
We wszystkich pozostałych przypadkach konieczne jest stosowanie metod numerycznych.
Dla odwzorowań jednowymiarowych można wyznaczyć numerycznie wykładnik Lapunowa stosując wzór (2). Natomiast dla układów wielowymiarowych bezpośrednie zastosowanie wzoru (1) lub (2) jest niemożliwe.
W literaturze można znaleźć wiele pozycji poświęconych numerycznemu wyznaczaniu wykładników Lapunowa dla układów wielowymiarowych, np. [3], [4], [5].
Ponadto opracowane są również metody wyznaczania wykładników Lapunowa z danych pomiarowych, np. [1], [2].
Zastosowanie wykładnika Lapunowa jako kryterium stabilności SEE
Zgodnie z tab. 1. wykładniki Lapunowa mogą przyjmować różne wartości (ujemne, równe zero lub dodatnie) w zależności od typu atraktora, jaki ma dany układ dynamiczny.
W przypadku omawianej metody istotne jest to, że największy wykładnik Lapunowa przyjmuje wartości ujemne w obszarze stabilnej pracy, natomiast w punkcie bifurkacji siodło-węzeł jest równy zero.
Po przekroczeniu punktu bifurkacji znikają oba punkty stałe i analizowany układ traci stabilność.
Jako kryterium stabilności proponuje się wykorzystać fakt, że w miarę zbliżania się do punktu utraty stabilności (punktu bifurkacji) wykładnik Lapunowa zbliża się do zera.
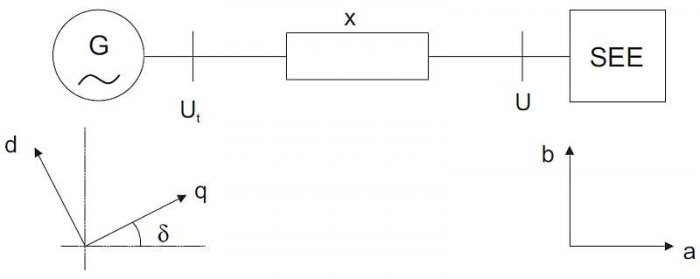
Metoda zostanie przedstawiona na przykładzie prostego modelu systemu złożonego z generatora synchronicznego połączonego z siecią sztywną poprzez linię o reaktancji x. W modelu tym uwzględnia się tylko równania ruchu wirnika, natomiast pomija wszystkie układy regulacji. Schemat przedstawiono na rys. 2.
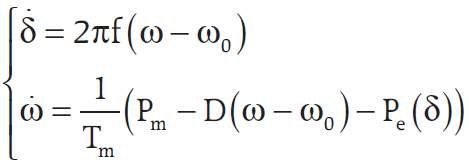
Równanie ruchu wirnika generatora w jednostkach względnych ma postać:
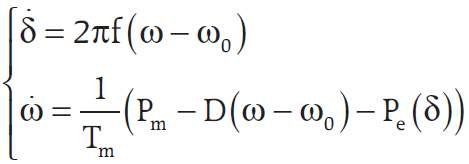
Wzór 3
gdzie:
Tm – mechaniczna stała czasowa,
Pm – moc mechaniczna generatora,
D – współczynnik oporu,
Pe(δ) – moc elektryczna generatora,
δ – kąt obrotu osi wirnika generatora względem osi SEE,
ω – częstotliwość kątowa generatora,
ω0 – częstotliwość kątowa sieci.
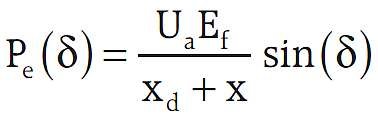
Moc elektryczna oddawana do SEE wynosi:
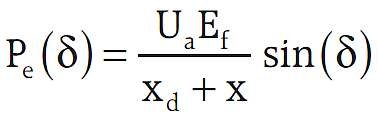
Wzór 4
gdzie:
Ua – składowa wzdłuż osi a napięcia sieci w układzie (a, b) (przyjęto, że Ub = 0),
Ef – napięcie wzbudzenia,
xd – reaktancja synchroniczna podłużna,
x – reaktancja linii.
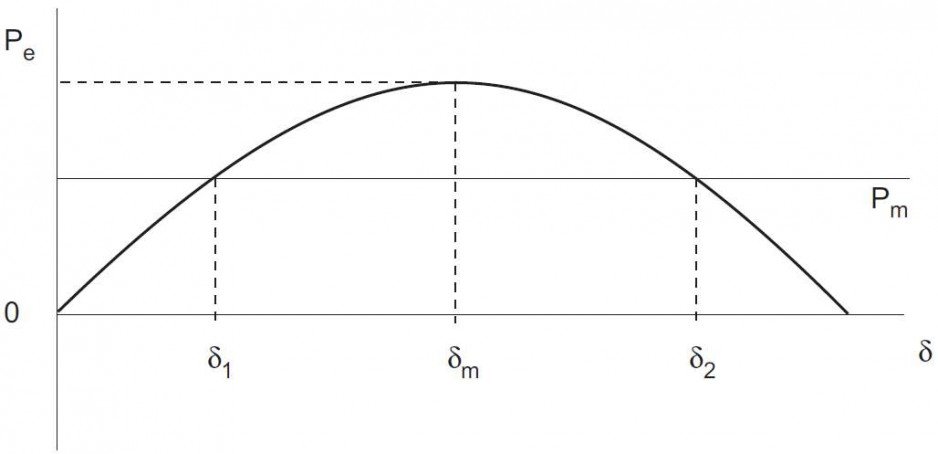
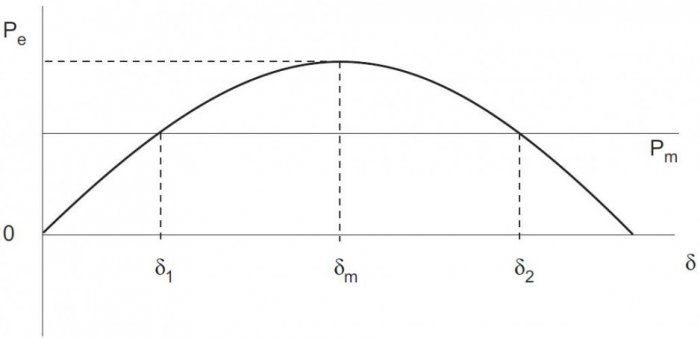
Rys. 3. Punkty stałe równania (3) w stanie ustalonym (d · = 0, ω· = 0); rys. O. Małyszko
Model składa się tylko z dwóch równań różniczkowych pierwszego rzędu, jednak z uwagi na składnik sin(d) jest on nieliniowy, a tym samym nierozwiązywalny analitycznie.
W stanie ustalonym ![]() częstotliwość kątowa generatora jest równa częstotliwości sieci (ω = ω0), natomiast moc mechaniczna pochodząca od turbiny jest równa mocy elektrycznej oddawanej do sieci (Pm = Pe). Pokazano to na rys. 3. Wynika z tego, że równanie (3) ma dwa punkty stałe.
częstotliwość kątowa generatora jest równa częstotliwości sieci (ω = ω0), natomiast moc mechaniczna pochodząca od turbiny jest równa mocy elektrycznej oddawanej do sieci (Pm = Pe). Pokazano to na rys. 3. Wynika z tego, że równanie (3) ma dwa punkty stałe.
Zgodnie z pierwszą metodą Lapunowa układ nieliniowy opisany równaniem ![]() będzie stabilny asymptotycznie w lokalnym otoczeniu punktu pracy y0, jeśli jego przybliżenie liniowe
będzie stabilny asymptotycznie w lokalnym otoczeniu punktu pracy y0, jeśli jego przybliżenie liniowe ![]() (gdzie A jest to macierz Jacobiego określona w punkcie y0) będzie stabilne asymptotycznie. Jeśli przybliżenie liniowe jest niestabilne, to układ nieliniowy jest również niestabilny. Natomiast jeżeli przybliżenie liniowe jest stabilne, ale nie asymptotycznie, to o zachowaniu się układu nieliniowego nie można nic powiedzieć.
(gdzie A jest to macierz Jacobiego określona w punkcie y0) będzie stabilne asymptotycznie. Jeśli przybliżenie liniowe jest niestabilne, to układ nieliniowy jest również niestabilny. Natomiast jeżeli przybliżenie liniowe jest stabilne, ale nie asymptotycznie, to o zachowaniu się układu nieliniowego nie można nic powiedzieć.
Układ liniowy jest stabilny asymptotycznie wtedy i tylko wtedy, kiedy wszystkie wartości własne macierzy A mają ujemne części rzeczywiste. Stabilność zależy jedynie od wartości własnych macierzy A i nie zależy od warunków początkowych y0.
Wartości własne macierzy A wyznacza się rozwiązując równanie det![]() , gdzie
, gdzie ![]() są to wartości własne, a I – macierz jednostkowa.
są to wartości własne, a I – macierz jednostkowa.
Dla równania (3) Jacobian ma postać:
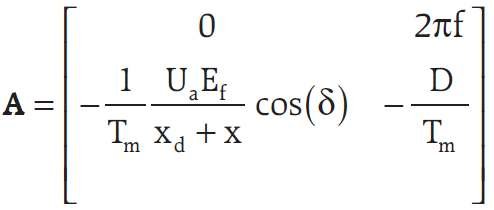
Wzór 5
Natomiast wartości własne otrzymuje się rozwiązując równanie:

Wzór 6
Wartości własne zlinearyzowanego układu równań (3) wynoszą zatem:
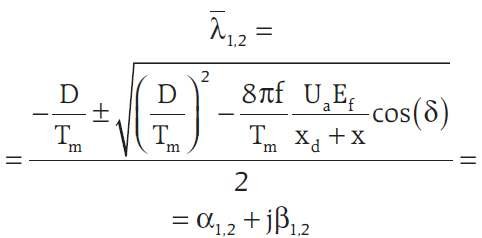
Wzór 7
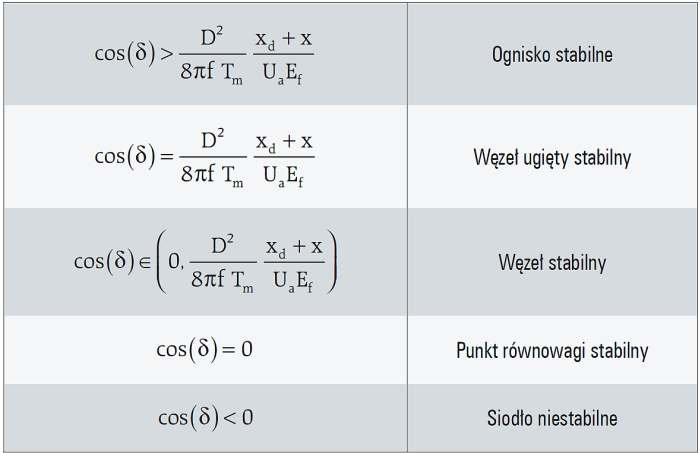
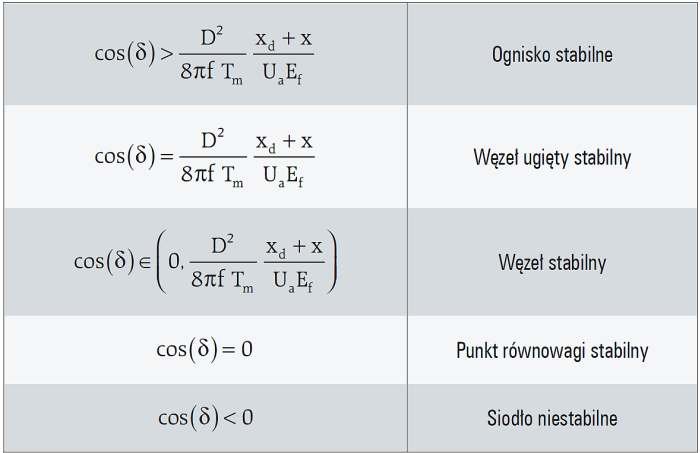
Tab. 2. Zestawienie rodzajów punktów stałych równania (3)
W tab. 2. zestawiono rodzaje występujących punktów stałych równania (3) w zależności od wartości kąta δ oraz parametrów systemu.
Zgodnie z tab. 2. punkt stały leżący w przedziale ![]() jest punktem stałym stabilnym, natomiast drugi punkt leżący w przedziale
jest punktem stałym stabilnym, natomiast drugi punkt leżący w przedziale ![]() jest to punkt stały niestabilny.
jest to punkt stały niestabilny.
W punkcie krytycznym ![]() następuje bifurkacja siodło-węzeł. Jeśli moc mechaniczna Pm przekroczy maksymalną wartość mocy elektrycznej Pe, jaką można przesłać do systemu (Pm > Pe(δ)max = Pe(δm)), wówczas znikają oba punkty stałe i układ traci stabilność.
następuje bifurkacja siodło-węzeł. Jeśli moc mechaniczna Pm przekroczy maksymalną wartość mocy elektrycznej Pe, jaką można przesłać do systemu (Pm > Pe(δ)max = Pe(δm)), wówczas znikają oba punkty stałe i układ traci stabilność.
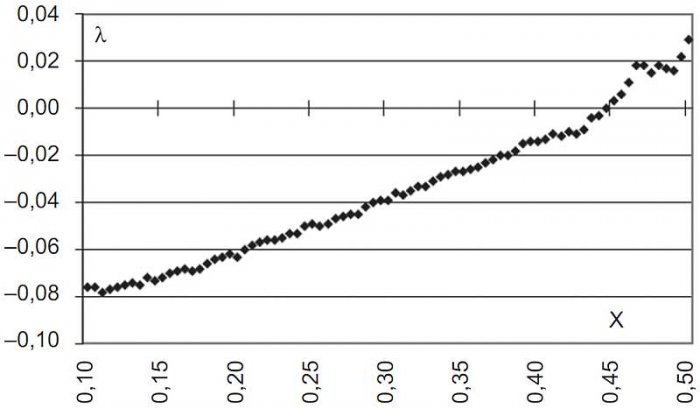
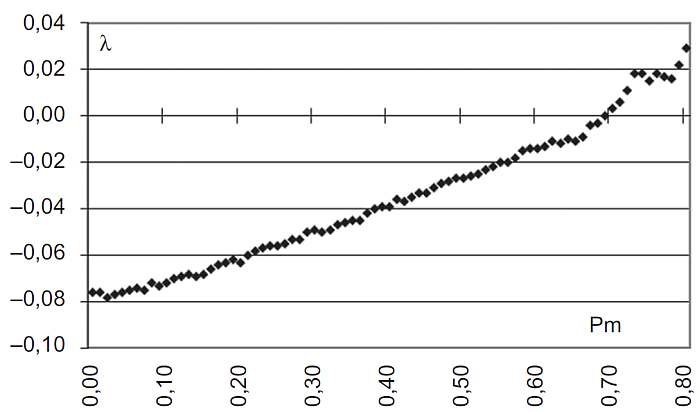
Zgodnie z tym, co powiedziano wcześniej, w zakresie stabilnej pracy (czyli tam, gdzie istnieją oba punkty stałe) wykładniki Lapunowa przyjmują wartości ujemne, natomiast w punkcie bifurkacji największy wykładnik przyjmuje wartość równą zero. Tę zmianę wartości wykładnika można użyć jako kryterium stabilności analizowanego układu. Pokazano to na rys. 4. i rys. 5., na których widać największy wykładnik Lapunowa w zależności od wartości reaktancji linii łączącej generator z siecią sztywną oraz mocy mechanicznej Pm.

Rys. 4. Zależność największego wykładnika Lapunowa od wartości reaktancji linii x; rys. O. Małyszko
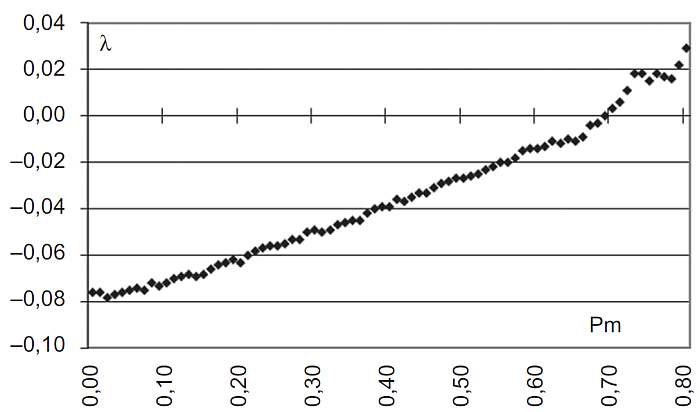
Rys. 5. Zależność największego wykładnika Lapunowa od wartości mocy mechanicznej Pm; rys. O. Małyszko
Na obydwu rysunkach widać, że po przekroczeniu pewnej wartości parametru kontrolnego (reaktancji linii na rys. 4. i mocy mechanicznej na rys. 5.) układ tracił stabilność. W punkcie bifurkacji znikają oba punkty stałe.
W praktyce, dla kontroli stabilności systemu wystarczy monitorować wartość wykładnika Lapunowa. Zbliżanie się jego wartości do zera jest sygnałem o możliwej utracie stabilności przez system.
Dla określenia odległości od granicy stabilności wprowadza się współczynnik zapasu stabilności kp (8):
Wzór 8
gdzie:

– moc graniczna.
Dla otrzymanych wyników wyznaczono współczynnik korelacji między największym wykładnikiem Lapunowa (rys. 5.) a wartością współczynnika zapasu stabilności kp i otrzymano wartość ρ(λ, kp) = –0,954. Wysoka wartość współczynnika korelacji świadczy o dużej zależności między wykładnikiem Lapunowa a współczynnikiem zapasu stabilności.
Wnioski
W artykule przedstawiono propozycję wykorzystania wykładników Lapunowa jako kryterium stabilności systemu elektroenergetycznego. Metodę przedstawiono na przykładzie prostego modelu fragmentu systemu złożonego z generatora przyłączonego do sieci sztywnej. Otrzymane wyniki świadczą, że wykładnik Lapunowa jest skorelowany ze współczynnikiem zapasu stabilności układu. Ponieważ wykładniki Lapunowa mogą być wyznaczane również z danych pomiarowych, istnieje możliwość wykorzystania przedstawionej metody do kontroli „online” zapasu stabilności w systemie.
Literatura
- P. Bryant, Computation of Lyapunov Exponents from Experimental Data, Proceedings of the 1st Experimental Chaos Conference, Arlington, Virginia, October 1-3, 1991.
- A. G. Darbyshire, Calculating Liapunov Exponents from a Time Series, IEE, Savoy Place, London, 1994.
- T. S. Parker, L. O. Chua, Practical Numerical Algorithms for Chaotic Systems, Springer-Verlag, New York 1989.
- T.S. Parker, L.O. Chua, Chaos: A Tutorial for Engineers, Proceedings of the IEEE, Special issue on chaotic systems, 09.1987.
- A. Wolf, J. Swift, H. Swinney, J. Vastano, Determining Lyapunov Exponents from a Time Series, Physica D, vol. 16, 1985, pp. 285-317.