Konfiguracja modułów rozszerzeń – cyfrowych wejść i wyjść sterowników PLC
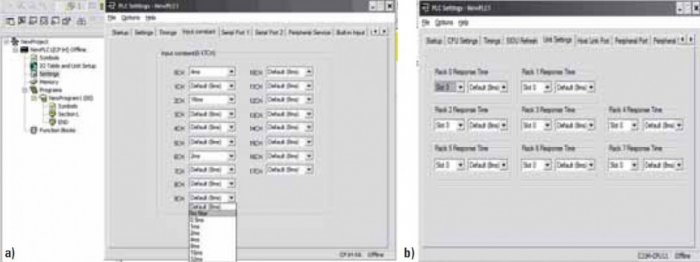
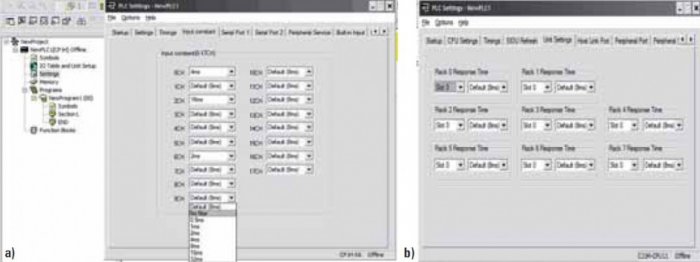
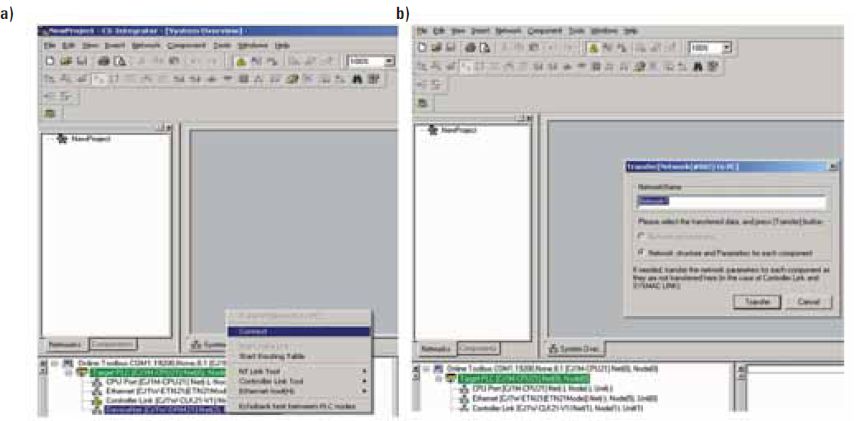
Widok rozwiniętych zakładek Input Constant dla wejść wbudowanych sterownika CP1H-XA i Unit Settings dla modułowych jednostek CPU nieposiadających wejść wbudowanych
K. Ludwinek, B. Krasuski
Wzrastające wymogi co do niezawodności i szybkości podejmowania decyzji (reakcji na zdarzenia), częste zmiany konfiguracyjne i rozbudowa układów sterowania wynikająca ze zmian technologicznych, ułatwienia diagnostyki i serwisu, czy znaczne zmniejszenie kosztów itp., wymusiły na konstruktorach sterowników PLC opracowanie takich układów wbudowanych wejść i wyjść oraz modułów rozszerzeń, które mogłyby sprostać tym wymaganiom.
Zobacz także
AUTOMATION TECHNOLOGY Sp. z o.o. Automation Technology – nowy gracz na rynku

Automation Technology prężnie działa w obszarach energetyki, automatyki przemysłowej oraz robotyki.
Automation Technology prężnie działa w obszarach energetyki, automatyki przemysłowej oraz robotyki.
mgr inż. Dominik Trojnicz, dr hab. inż. Marcin Habrych, mgr inż. Justyna Herlender Wymagania stawiane automatyce zabezpieczeniowej i regulacyjnej inwerterów typu A
Obecny bardzo gwałtowny rozwój fotowoltaiki – nie tylko w Polsce, ale na całym terenie Unii Europejskiej (UE) – niesie za sobą dużo zalet, takich jak pozyskiwanie energii z praktycznie nieskończonej energii...
Obecny bardzo gwałtowny rozwój fotowoltaiki – nie tylko w Polsce, ale na całym terenie Unii Europejskiej (UE) – niesie za sobą dużo zalet, takich jak pozyskiwanie energii z praktycznie nieskończonej energii słonecznej oraz brak emisji szkodliwych gazów, co przyczynia się do redukcji emisji gazów cieplarnianych i zmniejszenia negatywnego wpływu na środowisko. Przyłączenie dużej liczby odnawialnych źródeł energii (OZE) nie pozostaje jednak bez wpływu na sieci elektroenergetyczne.
dr hab. inż. Marcin Habrych, mgr inż. Karol Świerczyński, dr inż. Bartosz Brusiłowicz Wymagania techniczne stawiane generacji rozproszonej w aspekcie elektroenergetycznej automatyki zabezpieczeniowej (część 2.)
Odpowiedzią na wymagania stawiane przez Kodeks Sieciowy jest opracowanie przez Polskie Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej (PTPiREE) na zlecenie Polskich Sieci Elektroenergetycznych (PSE)...
Odpowiedzią na wymagania stawiane przez Kodeks Sieciowy jest opracowanie przez Polskie Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej (PTPiREE) na zlecenie Polskich Sieci Elektroenergetycznych (PSE) „Wymogów ogólnego stosowania wynikających z Rozporządzenia Komisji (UE) 2016/631 z dnia 14 kwietnia 2016 r., ustanawiającego Kodeks Sieci dotyczący wymogów w zakresie przyłączenia jednostek wytwórczych do sieci (NC RfG)” [4], opublikowanych w roku 2018.
Podstawą konfiguracji systemów modułowych oraz grupy z kompaktowym sterownikiem PLC stanowią cyfrowe moduły rozszerzeń:
- podstawowych i mieszanych wejść i wyjść (Direct Current and Mixed Digital Input and Output Unit),
- specjalnych wejść, w których sygnałem wejściowym jest np. napięcie przemienne (AC) lub AC/DC (Alternating Current/Direct Current Input Unit),
- wejść przerwaniowych (Interrupt Input Unit),
- szybkich wejść (High-speed Input Unit),
- wejść szybkiego licznika (Highspeed Counter Input Unit),
- wejść i wyjść TTL (TTL Input/Output Unit),
- wyjść przekaźnikowych (Relay Contact Output Unit),
- wyjść triakowych (Traic Output Unit).
Wymienione moduły (za wyjątkiem specjalnych wejść cyfrowych z sygnałem wejściowym AC oraz modułów wyjść triakowych, które są wewnętrznie wyzwalane impulsami cyfrowymi o odpowiednim poziomie napięcia i czasie trwania, natomiast sygnał wyjściowy z triaka jest analogowy), jak również jednostki CPU z wbudowanymi cyfrowymi wejściami i wyjściami pracują w dwóch stanach logicznych. W przypadku wejść potrafią przetwarzać sygnał cyfrowy bądź analogowy (ale o odpowiednim poziomie napięcia) na sygnał cyfrowy (odpowiadający tzw. stanom logicznym „0” lub „1”). W przypadku wyjść, wewnętrzny sygnał cyfrowy przetwarzany jest również na cyfrowy o odpowiednim poziomie napięcia, który wyprowadzany jest na poszczególne wyjścia.
Pierwszy stan, tzw. „0” logiczne, oznacza brak sygnału na wejściu lub wyjściu modułu oraz drugi stan, tzw. „1” logiczna, oznacza obecność sygnału o odpowiedniej wartości na wejściu lub wyjściu. Poziomy napięć odpowiadające logicznej „1” dla modułów wejść i wyjść cyfrowych lub wbudowanych wejść i wyjść cyfrowych sterowników PLC określa się ogólnie jako 24 V (lub w przypadku wejść LD – 5 V). Z przeprowadzonych przez autorów badań wynika, że po przekroczeniu 20 V sygnał wejściowy jest już traktowany jako logiczna „1” (ale spotyka się również moduły wejść cyfrowych lub wbudowanych wejść cyfrowych sterowników PLC, że już od 17,5 V sygnał jest traktowany jako „1”). Dla modułowych i kompaktowych sterowników PLC istnieje duży wybór dodatkowych modułów cyfrowych (tzw. modułów rozszerzających możliwości samego sterownika PLC).
W artykule przedstawiono najważniejsze informacje dotyczące rodzajów cyfrowych modułów wejść i wyjść z rodziny CJ, CS i CP. Przedstawiono sposób konfigurowania i programowania wejść i wyjść cyfrowych na przykładzie modułowego sterownika CJ1M Firmy OMRON (jednostka CPU21 tj. – z wbudowanymi cyfrowymi wejściami i wyjściami), który rozbudowano o dwa moduły rozszerzeń: cyfrowych wejść CJ1W–ID211 i wyjść CJ1W–OD212.
Moduły cyfrowych wejść i wyjść
Moduły cyfrowych wejść i wyjść posiadają wbudowany filtr wejściowy dający możliwość programowej zmiany minimalnego rozpoznawalnego czasu trwania sygnału wejściowego z rodziny CS1, CJ i CP1 od ∼0 do 32 ms, tj. 0 ms, 0,5 ms, 1 ms, 2 ms, 4 ms, 8 ms, 16 ms lub 32 ms z nastawą fabryczną (domyślną) 8 ms (Default), natomiast dla sterowników z rodziny CPM do 80 ms, tj. 1 ms, 2 ms, 3 ms, 5 ms, 10 ms, 20 ms, 40 ms lub 80 ms z nastawą fabryczną również 8 ms. Wydłużenie czasu w znacznym stopniu ogranicza, a nawet eliminuje skutki odbicia styków czujników, przycisków oraz pozwala wyeliminować stany niestabilne lub przypadkowe krótkotrwałe sygnały. Jeśli czas trwania sygnału wejściowego jest krótszy niż wynika to z ustawień, nie zostanie wykryty. Standardowo każdy moduł cyfrowy, jeśli nie zdefiniuje się inaczej, posiada filtr ustawiony domyślnie (Default) na minimalny czas trwania sygnału wejściowego 8 ms. Dla poszczególnych modułów i sterowników PLC filtr ten można zmienić poprzez odpowiednie ustawienia w oknie Project Propretis – Settings (PLC Settings) i wybór odpowiedniej zakładki w zależności od typu sterownika PLC.
Dla wersji CX-One 3.0 i Programu Cx-Programmer 7.3 będą to następujące zakładki. Dla sterowników PLC typu CJ i CS jest to zakładka Unit Settings, natomiast dla rodziny CP1L/H jest to zakładka Input Constant oraz dla starszych sterowników CPM1A i CPM2A/C jest to zakładka Interrupt/Refresh i następnie okno Input Constant. Na rysunku 1. przedstawiono widok rozwiniętej zakładki Input Constant dla wejść wbudowanych sterownika CP1H-XA z przykładowymi dokonanymi zmianami wykrywanego minimalnego czasu trwania sygnału wejściowego z ustawień domyślnych (Default 8 ms) dla każdego wejścia cyfrowego, na: 4 ms dla wejścia CIO0.00 (0CH), 16 ms dla wejścia CIO0.02 (2CH), 2 ms dla wejścia CIO0.06 (6CH) oraz rozwiniętym oknem możliwych czasów ustawień. W przypadku sterowników modułowych i jednostek CPU, które nie posiadają wbudowanych wejść i wyjść, nie ma zakładki Input Constant, jest natomiast zakładka Unit Settings (rys. 1b), gdzie widoczne są domyślne ustawienia również 8 ms dla poszczególnych grup rozszerzeń (liczba możliwych grup rozszerzeń, sposób konfiguracji i określanie adresów modułów rozszerzeń cyfrowych i analogowych wejść i wyjść dla modułowych i kompaktowych sterowników PLC były przedmiotem innych publikacji w „elektro.info”).
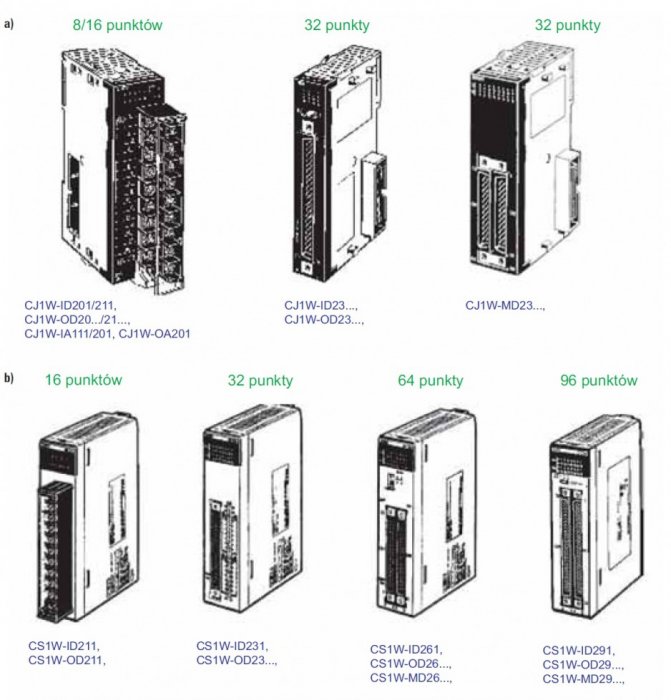
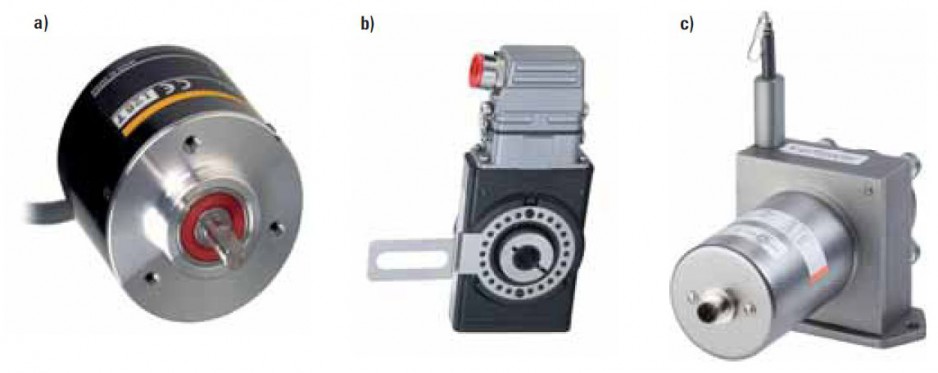
Na rysunku 2. przedstawiono widok przykładowych modułów cyfrowych [3] CP1W – … (lub CP1M – …) dla sterowników kompaktowych CP1L/H, CP1MA i CPM2A. Dla sterowników modułowych pokazanych na rysunku 3. przedstawiono widok przykładowych modułów cyfrowych CJ1W – … (rys. 3a) montowanych poprzez złącze rozszerzeń (dotyczy sterowników: CJ1M, CJ1G, CJ1H, CJ2H) oraz modułów cyfrowych CS1W – … (rys. 3b) montowanych na płytach montażowych jednostek CPU (dotyczy CS1H, CS1G, CS1D [1, 8].
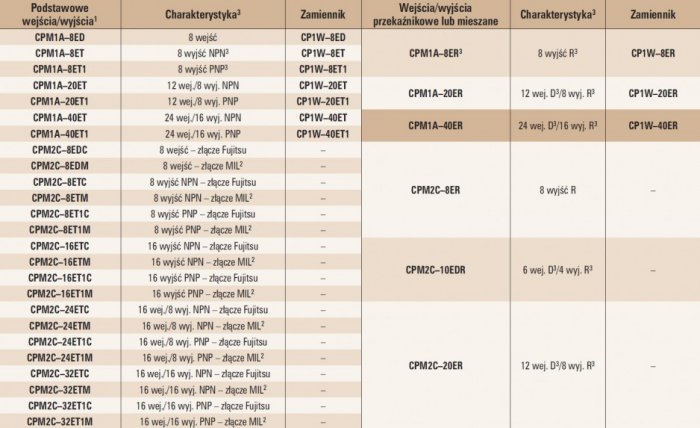
Cyfrowe moduły rozszerzeń rozróżnia się po oznaczeniu. I tak, wejścia cyfrowe (Input) po oznaczeniu ID np. CJ1W–ID231, wyjścia cyfrowe (Output) po oznaczeniu OD, np. CJ1W–OD231, natomiast moduły cyfrowych mieszanych wejść – wyjść (Mixed) oznacza się MD, np. CJ1W–MD23. Większość cyfrowych modułów rozszerzeń jest wyzwalana sygnałem cyfrowym narastającym (reagującym na zbocze narastające), opadającym (reagującym na zbocze opadające) lub poziomem napięcia [reagującym tylko na odpowiednią wartość napięcia odpowiadającej „1” logicznej (około 5 V – TTL lub tzw. wejścia LD, 12 V, 24 V) lub „0” logicznemu]. Niektóre moduły rozszerzeń współpracujące z modułowymi sterownikami PLC są wyzwalane sygnałami analogowymi o wartościach napięcia wejściowego od 85 do 260 V, np. moduł CJ1W–IA111 (16 wejść AC 100 - 120 V) do sterowników CJ1/2. Do modułów cyfrowych zalicza się również moduły wyjść triakowych, których sygnał wyjściowy (z triaka) jest wprawdzie analogowy, ale wewnętrznie wyzwalane są impulsami cyfrowymi o odpowiednim poziomie napięcia i czasie trwania. Przykładem takiego modułu jest CJ1W–OA201, posiadający 8 wyjść do 250 V AC, 5 A, 50/60 Hz. W tabelach 1-5 dla sterowników kompaktowych i modułowych z rodziny CP, CJ i CS zestawiono dostępne cyfrowe moduły rozszerzeń:
- wejść i wyjść dla sterowników modułowych i kompaktowych z rodziny CP (tab. 1.),
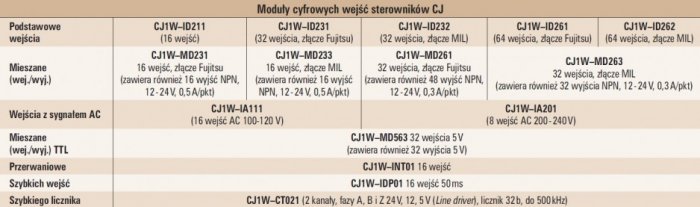
- wejść dla sterowników modułowych z rodziny CJ (tab. 2.),
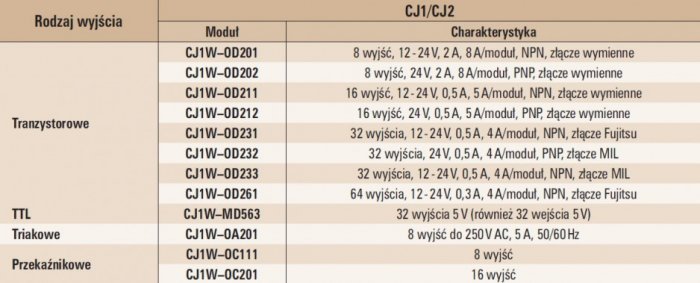
- wyjść dla sterowników modułowych z rodziny CJ (tab. 3.),
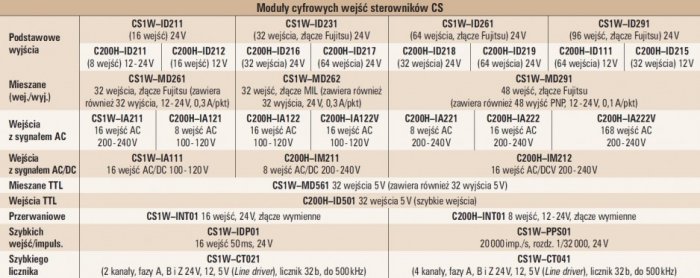
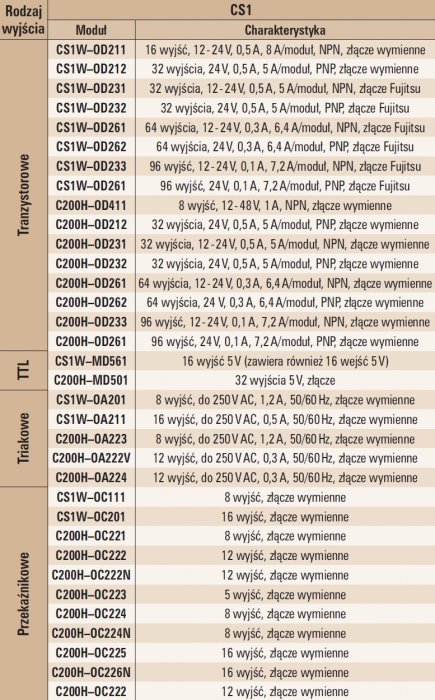
- wejść dla sterowników modułowych z rodziny CS (tab. 4.),
- wyjść dla sterowników modułowych z rodziny CS (tab. 5.).
W tabeli 1. zestawiono moduły rozszerzeń cyfrowych wejść i wyjść dla sterowników modułowych i kompaktowych z rodziny CPM1A, CPM2A i CPM2C. W tabeli 2. zestawiono moduły rozszerzeń cyfrowych wejść dla sterowników z rodziny CJ1M, CJ1G, CJ1H i CJ2H. W tabeli 3. zestawiono moduły rozszerzeń cyfrowych wyjść dla sterowników z rodziny CJ1M, CJ1G, CJ1H i CJ2H. W tabeli 4. zestawiono moduły rozszerzeń cyfrowych wejść dla sterowników z rodziny CS (CS1G, CS1H i CS1D). Kolorem niebieskim zaznaczono moduły cyfrowych wejść modułowych sterowników z rodziny C200H, które współpracują również ze sterownikami CS. W tabeli 5. zestawiono moduły rozszerzeń cyfrowych wyjść dla sterowników z rodziny CS. Kolorem niebieskim zaznaczono moduły cyfrowych wejść modułowych sterowników z rodziny C200H, które współpracują również ze sterownikami CS.
Charakterystyka modułów rozszerzeń z grupy podstawowych cyfrowych wejść i wyjść
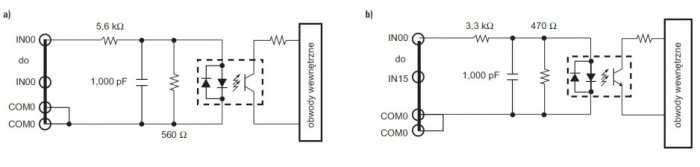
Każdy z przedstawionych w tabelach 1-5 modułów rozszerzeń z grupy podstawowych cyfrowych wejść i wyjść posiada oprócz filtru ustawianego w sposób programowy, także obwód wejściowy będący sam w sobie filtrem dolnoprzepustowym. Przykłady takich obwodów wejściowych dla modułów CJ1W–ID231, CJ1W–ID232, CJ1W–ID261 i CJ1W–ID262 przedstawiono na rysunku 4a oraz dla CJ1W–ID211 na rysunku 4b [1]. Cechą charakterystyczną obwodów wejść cyfrowych jest antyrównoległy układ dwóch diod współpracujących z fototranzystorem. Takie połączenie oznacza, że układ może być załączony niezależnie od biegunowości źródła obwodu wejściowego.
Przebieg czasowy zmian napięcia uC(t) na kondensatorze 1000 pF obwodu wejściowego przedstawionego na rysunku 4. przy sygnale skokowym zmieniającym się od 0 do 24 V bez uwzględnienia przewodzenia diody można obliczyć na podstawie zależności (1):
Wzór 1
gdzie:
U⋅(t) – skokowa zmiana napięcia na wejściu układu (U=24 V), R1=5,6 kΩ, R2=560 Ω, C=1 nF,
uC(t) – napięcie na kondensatorze, które po osiągnięciu wartości przewodzenia diody utrzymuje się na poziomie 1,5 V (w badaniach symulacyjnych przyjęto napięcie w stanie przewodzenia diody transoptora jako 1,5 V).
Zależność (1) zapisana z wykorzystaniem transformaty Laplace’a:

Wzór 2
Przekształcając zależność (2) ze względu na napięcie na kondensatorze UC(s) otrzymano:
Wzór 3
Aby uzyskać rozwiązanie zależności (3) ze względu na postać czasową uC(t), należy skorzystać z odwrotnego przekształcenia Laplace’a. Stąd napięcie na kondensatorze uC(t) wynosi:

Wzór 4
gdzie:
τ – stała czasowa R2C.
Napięcie na kondensatorze uzyska wartość 1,5 V po czasie tD:
Wzór 5
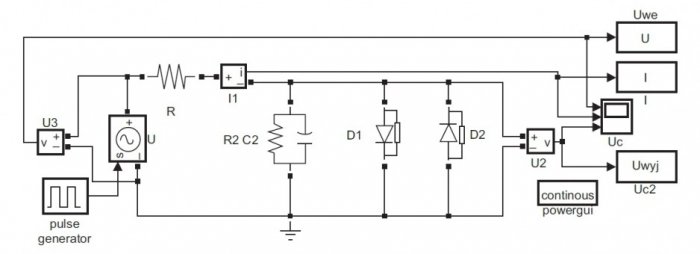
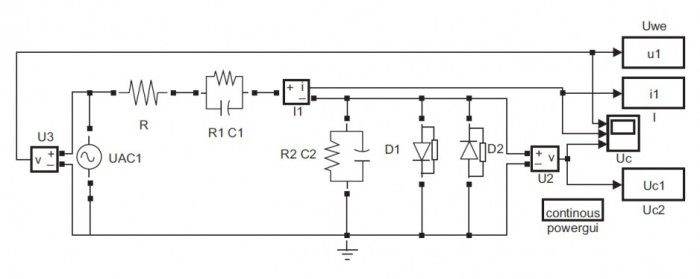
Wynik symulacji przebiegu czasowego zmian napięcia na kondensatorze uC(t) w układzie przedstawionym na rysunku 4. przeprowadzono w układzie jak na rysunku 5. w programie Matlab/Simulink przy skokowej zmianie napięcia od 0 do 24 V z uwzględnieniem napięcia przewodzenia diod (w badaniach symulacyjnych przyjęto 1,5 V, typowe wartości napięcia przewodzenia UF diod w transoptorach wynoszą od 1,2 do 1,7 V).
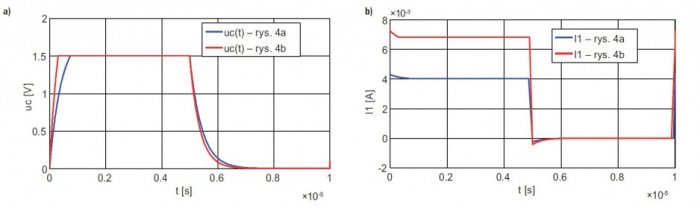
Wyniki badań przebiegów czasowych zmian napięcia na kondensatorze uC(t) i prądów wejściowych dla układów filtrów z rysunku 4. przedstawiono na rysunku 6.
Czasy opóźnienia wnoszone przez filtry wejściowe (po których napięcie na diodzie osiągnie wartość umożliwiającą wejście jej w stan przewodzenia) wynoszą dla układu z rysunku 4a około 0,74 μs, dla układu z rysunku 4b około 0,31 μs i są pomijalnie małe w odniesieniu do całkowitego czasu jednego cyklu programu. Producenci nie podają dokładnie, jakie parametry wewnętrzne wpływają na ten czas. Przeprowadzona symulacja potwierdza występujące w dokumentacjach przykłady obliczeń całkowitego czasu jednego cyklu programu, w których potrzebne jest określenie czasu opóźnienia, jaki wystąpi w układach wejściowych z modułami cyfrowymi, w których parametry R1, R2 i C wynoszą jak na rysunku 4. [4]. W przypadku innych parametrów R1, R2 i C opóźnienie oblicza się na podstawie zależności (1 - 5).
Całkowity czas cyklu sterowników PLC z modułami wejść/wyjść cyfrowych
Na całkowity czas cyklu sterowników PLC firmy Omron składa się pięć faz [4]:
- pierwsza faza – nadzorowania dla sterowników PLC firmy Omron jest stała, np. dla CP1L wynosi 0,4 ms, dla starszych sterowników CPM1A jest równa 0,6 ms,
- druga faza – wykonania programu w zależności od liczby linii od góry do dołu aż do instrukcji END. Czas trwania tej fazy jest zmienny i zależy od długości oraz zawartości programu. W każdej linii może być dowolna liczba warunków zakończonych użyciem instrukcji końcowej (funkcji lub wyjścia). Czas 0,55 ms występuje np. w dokumentacji [4] jako czas wykonania obsługi jednego wejścia cyfrowego, np. dla modułu CP1W–40EDR, natomiast obsługa dla wyjścia jest to czas 1,1 ms. W przypadku programu o liczbie wejść, np. 300, i wyjść, np. 100, otrzymuje się następujący wynik 300×0,55 ms+ +100×1,1 ms=275 ms,
- trzecia faza – obliczania i kontroli czasu cyklu jest ustawiona programowo. W przypadku pracy ze zmiennym czasem cyklu faza ta jest bardzo mała ∼0 ms i czasami w instrukcjach dla danego typu sterownika jest pomijana [5],
- czwarta faza – odświeżania wejść/wyjść, tj. przepisania stanów wejść i wyjść do pamięci sterownika. Należy pamiętać, że każdy program w układach mikroprocesorowych pracuje na podstawie bitów lub słów w pamięci, a nie na rzeczywistych wejściach czy wyjściach. Zarówno dla wejść i wyjść wbudowanych, jak i modułów czas ten jest stały. Przykładowo dla CP1W–40EDR/40EDT/40EDT1 i CPM1A–40EDR/40EDT/40EDT1) wynosi 0,39 ms, natomiast dla najmniejszych modułów CP1W–8ER/8ED/8EDT/8EDT1 i również dla CPM1A–8ER/8ED/8EDT/8EDT1) wynosi 0,08 ms. Sumaryczny czas odświeżania wejść i wyjść każdego dołączonego modułu jest mnożony przez liczbę używanych modułów. W przypadku braku dołączonych modułów czas czwartej fazy jest równy 0 ms [5],
- piąta faza – obsługa portów peryferyjnych (USB, szeregowych, komunikacyjnych, dostępu do kasety pamięci), np. dla portu szeregowego lub USB sterowników CP1L/H czas ten wynosi 0,1 ms, ale może być również zmieniony programowo. Jeśli porty nie są podłączone, czas realizacji usług wyniesie 0 ms [5].
Najkrótsze opóźnienie pomiędzy zmianą sygnału na wejściu cyfrowym a pojawieniem się sygnału na wyjściu cyfrowym występuje, jeśli zmiana sygnału na wejściu odbędzie się tuż przed czwartą fazą. Natomiast najdłuższe opóźnienie wystąpi, jeśli zmiana sygnału na wejściu odbędzie się tuż przed piątą fazą, czyli już po odświeżeniu wejść/wyjść. Opóźnienie to będzie spowodowane dodatkowym czasem kolejnego cyklu, gdyż dopiero w następnym cyklu nastąpi odświeżenie wejść/wyjść. Należy pamiętać, że zmiana trybu pracy sterowników PLC w programie Cx-Programmer powoduje również zmianę czasu cyklu. Przy zmianie z trybu RUN na tryb MONITOR czas cyklu zostanie wydłużony, np. dla CP1L do około 10 ms.
Charakterystyka modułów rozszerzeń cyfrowych wejść z sygnałem AC
Obwody wejściowe modułów cyfrowych mogą być również wyzwalane (zasilane) napięciem przemiennym. Na podstawie przeprowadzonych badań naukowych dotyczących przesyłania kształtu sygnałów cyfrowych szczególnie na dalsze odległości okazuje się, że najdalej przesyłane są sygnały o przebiegu sinusoidalnym [2]. Można to wytłumaczyć tym, że każdy przebieg odkształcony od przebiegu sinusoidalnego zawiera oprócz sygnału sinusoidalnego zwanego składową podstawową, także sygnały będące całkowitą wielokrotnością (tzw. harmoniczne), niebędące całkowitą wielokrotnością (tzw. interharmoniczne) oraz sygnały będące ułamkową wielokrotnością (tzw. subharmoniczne). Dla każdego takiego sygnału o różnej częstotliwości przewód będzie stanowił inny opór czynny związany ze zmianą głębokości wnikania prądu w przewodnik (zjawisko naskórkowości) i bierny związany ze zmianą reaktancji indukcyjnej lub pojemnościowej.
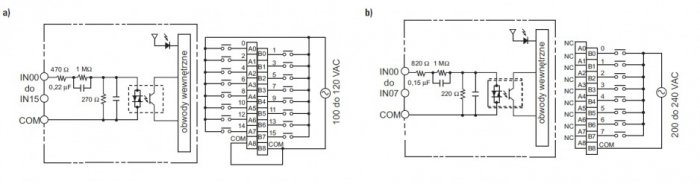
Sumaryczny opór stawiany przez przewód będzie większy niż w przypadku przebiegu sinusoidalnego. Ponadto moduły wejść cyfrowych z sygnałem AC z uwagi na znaczne wartości sygnałów wejściowych, które mogą wahać się od 85 V dla modułu CJ1W–IA111 do 264 V dla modułu CJ1W–IA201 sygnału przemiennego są bardziej odporne na zakłócenia. Każdy z przedstawionych w tabeli 2. i tabeli 3. modułów wejść cyfrowych z sygnałem AC posiada oprócz filtru ustawianego w sposób programowy, także obwód wejściowy, będący również filtrem dolnoprzepustowym nieco bardziej rozbudowanym niż przedstawiony na rysunku 4. (ze względu na kilka razy większe wartości napięć zasilania wynoszące w zależności od modułu od 85 do 264 V). Przykład takich obwodów wejściowych wraz z rozmieszczeniem i opisem zacisków dla modułów CJ1W–IA111 i CJ1W÷IA201 przedstawiono na rysunku 7a i 7b [1].
Producenci zwykle nie podają bliższych informacji na temat niektórych elementów i parametrów obwodów wejściowych. W przeprowadzonych badaniach stymulacyjnych założono, że nieopisane elementy są o wartościach podobnych jak na rysunku 4. W układzie jak na rysunku 7. rezystor na wejściu ogranicza udary prądów, które wystąpiłyby w chwili bezpośredniego załączenia napięcia na kondensatory. Rezystor 1 MΩ służy do rozładowania kondensatora po wyłączeniu napięcia zasilającego. Napięcia resztkowe kondensatorów będą zanikały ze stałą czasową τ1=1 MΩ×0,15 μF równą 0,15 s i τ2=1 MΩ×0,22 μF równą 0,22 s. Po kilku stałych czasowych napięcia na kondensatorach 0,15 μF i 0,22 μF wejściowych będzie bliskie 0 V. Zadaniem kondensatorów 0,15 μF i 0,22 μF jest ograniczenie prądów płynących przez diody współpracujące z fototranzystorem transoptora.
Przedstawione na rysunku 7. układy są często wykorzystywane w różnego typu maszynach i urządzeniach do sygnalizacji: włączonego odbiornika do sieci zasilania bądź obecności napięcia przemiennego. W układach tych ograniczenie prądu można by było również zrealizować (jak to również często się spotyka) za pomocą rezystora, jednak trzeba się liczyć ze stratą mocy, np. w przypadku napięcia 200 V i prądu 10 mA około 2 W (na rezystancji 20 kΩ). W przypadku zastosowania kondensatora ograniczamy wartość płynącego prądu za pomocą reaktancji pojemnościowej, a jak wiadomo, straty mocy w takich elementach są praktycznie bliskie 0 W.
Stałe czasowe narastania sygnałów obwodów wejściowych w obu przypadkach są podobne i wynoszą dla układu z rysunku 7a około 152 ms, natomiast w układzie z rysunku 6b około 156 μs i są znacznie większe niż stałe czasowe dla modułów rozszerzeń z grupy podstawowych cyfrowych wejść i wyjść z uwagi na ich przeznaczenie dla sygnałów wolnozmiennych, tj. napięć przemiennych 50 Hz. Większe stałe czasowe na wejściach obwodów oznaczają większe tłumienie sygnałów wejściowych, szczególnie krótkotrwałych i o dużych stromościach.
Pamiętać należy, że sygnał wejściowy dla modułów CJ1W–IA111, CJ1W–IA201 i CS1W–IA211 będzie ograniczony do około 10 mA dla sygnału napięciowego o częstotliwości 50 Hz. W przypadku niższych częstotliwości prąd będzie mniejszy (dla sygnałów stałych układ nie pracuje – kondensatory wprowadzają tzw. „przerwę w obwodzie”, a dzielnik złożony z rezystorów spowoduje, że na rezystancji 1 MΩ odłoży się praktycznie całe napięcie). W przypadku wyższych częstotliwości f prąd wejściowy będzie większy z uwagi na zmniejszającą się wartość reaktancji 1/(2πfC) głównie pojemności C1 (0,15 μF i 0,22 μF).
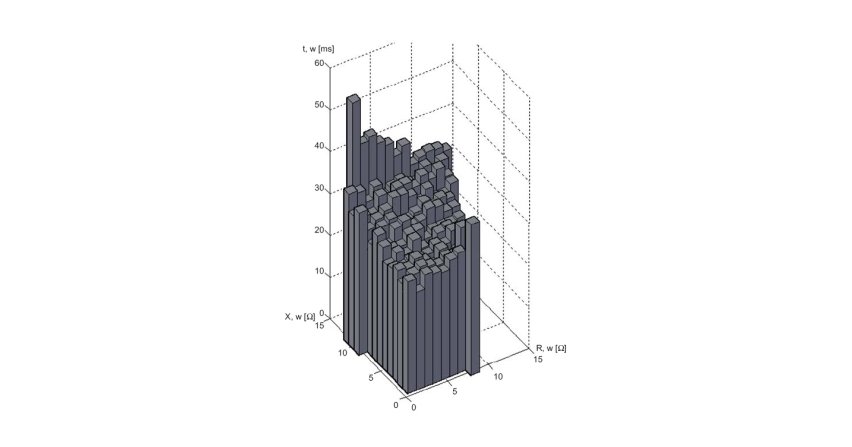
Symulację zmian napięcia na rezystorze 220 i 270 W (lub na kondensatorze uC2(t) przyjęto C2=1000 pF) obwodu wejściowego jak na rysunku 7. przy sygnale wejściowym sinusoidalnym o amplitudzie odpowiednio 100√2 i 200√2 z uwzględnieniem przewodzenia diod przeprowadzono w układzie jak na rysunku 8. w środowisku Matlab/Simulink na podstawie zmodyfikowanego schematu jak na rysunku 5. po dołączeniu na wejście pojemności i rezystancji oraz zmianie rodzaju źródła sterowania na sinusoidalne.
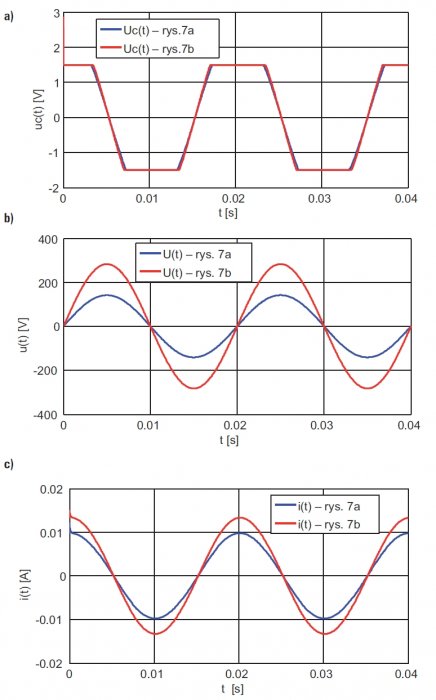
Wyniki badań, tj. obliczone przebiegi czasowe napięcia uC2(t) dla układów filtrów z rysunków 7a i 7b napięcia na wejściu i prądu wejściowego przedstawiono na rysunku 9.
Sygnał napięciowy na badanym wyjściu uC2(t) obwodu wejściowego jest przesunięty w fazie w odniesieniu do sygnału na wejściu w obu przypadkach o około 10 ms z uwagi na prawie całkowicie pojemnościowy charakter prądu całego obwodu wejściowego. Takie opóźnienie sygnału wystąpi, jeśli dany moduł CJ1W-IA 111 lub CJ1W-IA 201, pracujący w danej grupie, posiada zmieniony minimalny czas trwania sygnału wejściowego z ustawień domyślnych (Default 8 ms) na 0 ms. W przeciwnym razie całkowite opóźnienie będzie sumą poszczególnych opóźnień i będzie wynosić około 18 ms, co potwierdzają również wartości podane przez producenta. Takie opóźnienia wystąpią dla ustawionej reakcji modułu na narastający sygnał napięcia (ON Response Time). Dla ustawionej reakcji modułu na opadający sygnał napięcia (OFF Response Time) opóźnienia zależą również od parametrów wewnętrznych modułu i dla CJ1W-IA 111 wynoszą 63 ms (przy pozostawionym Default 8 ms) natomiast dla CJ1W-IA 201 wynoszą 48 ms (przy pozostawionym Default 8 ms).
Przedstawione w artykule układy symulacyjne umożliwiają również określenie wartości prądów pobieranych przez poszczególne obwody wejściowe modułów cyfrowych, co np. jest szczególnie ważne przy rozbudowie już istniejących systemów i prawidłowym określeniem możliwości wykorzystania wydajności istniejącego zasilacza.
Podsumowanie
W artykule podano najważniejsze zagadnienia dotyczące rodzajów modułów rozszerzeń cyfrowych wejść i wyjść sterowników PLC, które umożliwiają rozbudowę grup sterowników kompaktowych CPM1A, CPM2A, CP1L i CP1H oraz sterowników modułowych CJ1M, CJ1G, CJ1H, CJ2H oraz CS1G, CS1H i CS1D. Podane zagadnienia mają na celu przybliżenie użytkownikom zajmującym się programowaniem bądź diagnostyką sterowników PLC najważniejszych zagadnień związanych z wykorzystaniem, rozbudową oraz ewentualnymi zamiennikami modułów rozszerzeń cyfrowych wejść i wyjść. Ponadto w artykule przedstawiono przykładowe badania symulacyjne przebiegów czasowych w zależności od rodzaju wprowadzanych sygnałów na moduły cyfrowe. Przedstawione przebiegi czasowe mają na celu przybliżenie zjawisk zachodzących podczas pracy podstawowych modułów cyfrowych oraz modułów cyfrowych wejść z sygnałem AC.
Literatura
- Sysmac CJ1, Modułowy sterownik o małych wymiarach i wielkich możliwościach, Omron 2004.
- D. E. Comer, Sieci komputerowe i intersieci, WNT, Warszawa 2003.
- CP1L_Datasheet (P20E–EN–01). Omron 2007.
- CP1L CPU Unit, Operational manual, Omron 2007.
- Moduł jednostki centralnej CP1L, Podręcznik wprowadzający, Omron 2007.
- Sysmac CP Series, CP1H/CP1L CPU Unit, Programming Manual, Omron 2007.
- Programmable Controllers, Sysmac CJ2, Omron 2008.
- Sterowniki programowalne serii Sysmac CS, Omron 2004.