Charakterystyka zaawansowanych architektur sterowników PLC (cz. 1 – sprzęt)
Characteristics of the advanced architectures of Programmable Logic Controllers (part 1 – hardware)
W artykule przedstawiono architektury zaawansowanych programowalnych sterowników logicznych (PLC). Między innymi omówiono ogólną strukturę systemu komputerowego przystosowanego do realizacji zadań pomiarowo-sterujących.
Począwszy od
końca lat sześćdziesiątych ubiegłego wieku, kiedy to pojawiły się pierwsze
modele sterowników PLC wykorzystane w przemyśle samochodowym, ich
zastosowania uległy znaczącemu rozszerzeniu. Pierwotnie wykorzystywane jako
automatyczne przekaźniki, operujące wyłącznie na zmiennych dwustanowych,
obecnie są uniwersalnymi komputerami stosowanymi w wielu aplikacjach przemysłowych.
Te ostatnie obejmują monitoring pojedynczych maszyn i urządzeń, całych
instalacji produkcyjnych, a także współpracę z podobnymi modułami
w ramach systemów rozproszonych.
Zobacz także
AUTOMATION TECHNOLOGY Sp. z o.o. Automation Technology – nowy gracz na rynku

Automation Technology prężnie działa w obszarach energetyki, automatyki przemysłowej oraz robotyki.
Automation Technology prężnie działa w obszarach energetyki, automatyki przemysłowej oraz robotyki.
mgr inż. Dominik Trojnicz, dr hab. inż. Marcin Habrych, mgr inż. Justyna Herlender Wymagania stawiane automatyce zabezpieczeniowej i regulacyjnej inwerterów typu A
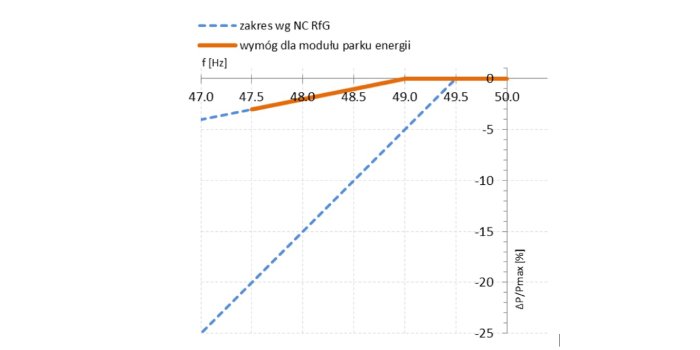
Obecny bardzo gwałtowny rozwój fotowoltaiki – nie tylko w Polsce, ale na całym terenie Unii Europejskiej (UE) – niesie za sobą dużo zalet, takich jak pozyskiwanie energii z praktycznie nieskończonej energii...
Obecny bardzo gwałtowny rozwój fotowoltaiki – nie tylko w Polsce, ale na całym terenie Unii Europejskiej (UE) – niesie za sobą dużo zalet, takich jak pozyskiwanie energii z praktycznie nieskończonej energii słonecznej oraz brak emisji szkodliwych gazów, co przyczynia się do redukcji emisji gazów cieplarnianych i zmniejszenia negatywnego wpływu na środowisko. Przyłączenie dużej liczby odnawialnych źródeł energii (OZE) nie pozostaje jednak bez wpływu na sieci elektroenergetyczne.
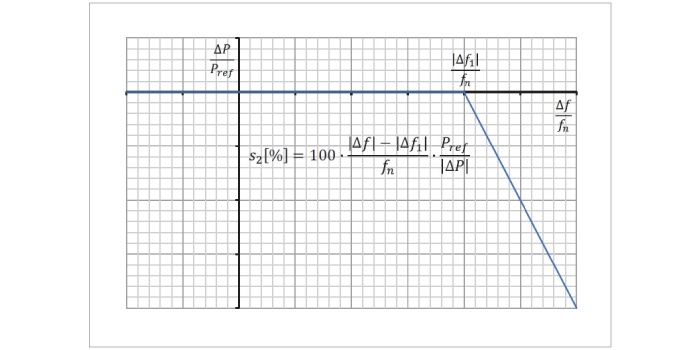
dr hab. inż. Marcin Habrych, mgr inż. Karol Świerczyński, dr inż. Bartosz Brusiłowicz Wymagania techniczne stawiane generacji rozproszonej w aspekcie elektroenergetycznej automatyki zabezpieczeniowej (część 2.)
Odpowiedzią na wymagania stawiane przez Kodeks Sieciowy jest opracowanie przez Polskie Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej (PTPiREE) na zlecenie Polskich Sieci Elektroenergetycznych (PSE)...
Odpowiedzią na wymagania stawiane przez Kodeks Sieciowy jest opracowanie przez Polskie Towarzystwo Przesyłu i Rozdziału Energii Elektrycznej (PTPiREE) na zlecenie Polskich Sieci Elektroenergetycznych (PSE) „Wymogów ogólnego stosowania wynikających z Rozporządzenia Komisji (UE) 2016/631 z dnia 14 kwietnia 2016 r., ustanawiającego Kodeks Sieci dotyczący wymogów w zakresie przyłączenia jednostek wytwórczych do sieci (NC RfG)” [4], opublikowanych w roku 2018.
W artykule:• Ogólna architektura sterownika PLC• Parametry systemów zaawansowanych • Funkcjonalność systemów zaawansowanych • Przykłady porównawcze |
Efektem znaczącego rozszerzenia zastosowań jest także powiększenie zbioru konfiguracji sterowników, różniących się pod względem możliwości obliczeniowych, stopniem skomplikowania oprogramowania, czy dostępnymi interfejsami komunikacyjnymi.
Wraz z rozwojem technologii komputerowych ogólnego przeznaczenia, obserwuje się również powstawanie kolejnych generacji komputerów przemysłowych oraz systemów cyfrowych do zastosowań specjalistycznych.
W przypadku sterowników PLC na przestrzeni lat wyodrębniły się rodziny urządzeń, wyraźnie różniące się możliwościami oraz preferowanymi zastosowaniami.
Na ogólnym poziomie można tu wyróżnić:
- sterowniki proste,
- sterowniki zaawansowane
- oraz sterowniki przeznaczone do współpracy w ramach systemu rozproszonego [1].
O ile te pierwsze bliższe są pod względem struktury i oprogramowania swoim starszym pierwowzorom (charakteryzując się jednocześnie stosunkowo niską ceną), o tyle pozostałe rodziny znacząco wyewoluowały, prezentując szereg rozwiązań (szczególnie sprzętowych), które umożliwiają ich zastosowanie nie tylko jako prostych przekaźników, czy modułów akwizycji danych, ale w pełni funkcjonalnych systemów przetwarzania danych i automatycznego podejmowania decyzji.
W artykule przedstawiono współczesne zaawansowane sterowniki PLC, oferowane przez większość producentów tego rodzaju sprzętu. Dokonano w szczególności porównania ich z prostszymi odpowiednikami, a także szczegółowo opisano parametry czyniące z nich zaawansowane komputerowe systemy przemysłowe.
W artykule szczególny nacisk położono na elementy sprzętowe, pomimo iż urządzenia te mają cechują się również odrębnymi technikami tworzenia oprogramowania (poświęcony im będzie osobny tekst).
W pierwszej kolejności przedstawiono ogólną architekturę sterownika PLC, wspólną dla większości urządzeń tego typu. Następnie przedstawiono parametry komputera przemysłowego, które decydują o jego możliwościach i zakresie zastosowań. Wiążą się z nimi określone funkcjonalności, konfigurowane i implementowane przez programistów i operatorów.
Artykuł podsumowuje analiza porównawcza wcześniej wprowadzonych parametrów dla konkretnych sterowników, wraz z określeniem możliwości ich zastosowań w poszczególnych gałęziach przemysłu.
| Applications of the PLC devices are much wider now than in the early sixties of the XXth century, when the first models were used in the automotive industry. Initially they were applied to replace the mechanical relays processing only binary values. Currently PLCs are versatile industrial computers applied in various high-demand applications. The latter include monitoring single machines and devices, complete production installations and cooperation with similar hardware modules as the part of the distributed system. The effect of the significant extension of their applications imposed introduction of the whole families of computers, differing in terms of computational capabilities, degree of software complexity or available communication interfaces. With the development of general purpose computer technologies, new generations of industrial computers and digital systems for the specialized applications are introduced. In the case of PLCs, during the years a couple of device families emerged, significantly varying in terms of computational capabilities and preferred usage. On the general level, three groups of computers exist:
The paper overviews contemporary advanced PLCs, offered by the majority of manufacturers. The comparison between the simplest and more advanced configurations is made. Parameters determining the complexity of the industrial computer system and range of its applications are introduced. The paper is focused on the hardware elements of the PLC, although the advanced devices also differ regarding the software design methodologies (which will be covered in the separate paper). Firstly, the general architecture of the PLC (common to the vast majority of such computers) is discussed. Next, parameters of the industrial modules determining their capabilities and range of applications are presented. They are closely related with the available functionalities, configured and implemented by the programmers or operators. The text is summarized by the comparative analysis of considered parameters for the specific controllers, determining their abilities and applications in the particular branches of industry. |
Ogólna architektura sterownika PLC
Zgodnie z normą IEC 61131-3 sterownik PLC definiowany jest jako system cyfrowy wyposażony w programowaną pamięć, pracujący autonomicznie i wykonujący algorytm pomiarów i sterowania za pomocą wejść i wyjść analogowych lub cyfrowych [2]. Należy zatem go identyfikować jako rodzaj specjalizowanego komputera służącego do wykonywania mniej lub bardziej skomplikowanych operacji związanych z zastosowaniami przemysłowymi. Co prawda funkcjonalność sterownika może zostać odwzorowana przez komputer ogólnego przeznaczenia, jednak nie da się tą metodą zapewnić podobnej niezawodności (zarówno ze względu na komponenty sprzętowe, jak i charakter pracy oprogramowania).
Jego ogólna budowa nie różni się specjalnie od struktury klasycznego systemu komputerowego, którego główne komponenty zdefiniował John von Neumann ze współpracownikami już w 1945 roku. Znajdują się tutaj zatem:
- jednostka centralna (ang. Central Processing Unit – CPU),
- pamięć do przechowywania programu i danych,
- a także szereg modułów wejścia-wyjścia, których liczba jest jednym z wyznaczników złożoności systemu.
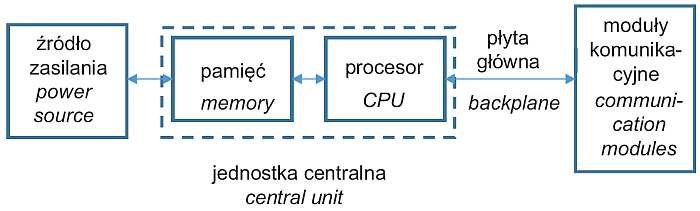
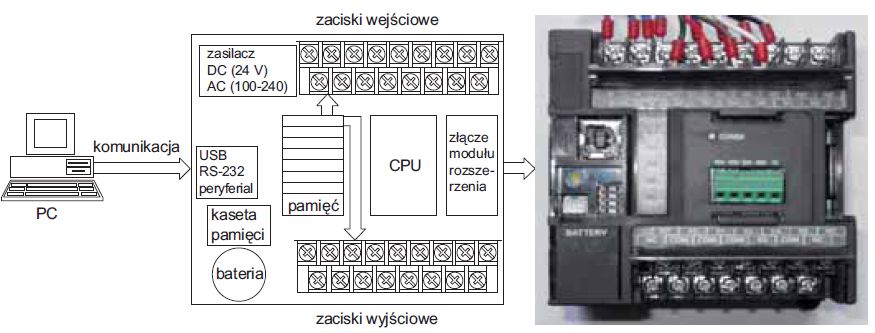
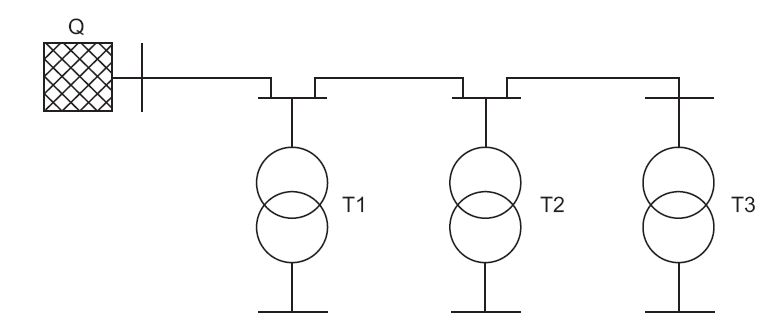
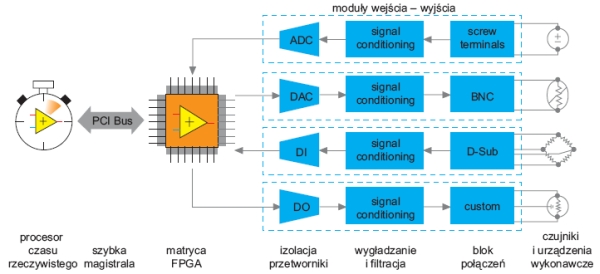
Ogólna struktura sterownika PLC przedstawiona jest na rys. 1. [3].
Wyróżnić tu należy przede wszystkim:
- jednostkę centralną zawierającą procesor wraz z pamięcią,
- źródło zasilania (zwykle stanowiące odrębny element)
- a także moduły komunikacyjne, decydujące o użyteczności komputera.
Istotnym elementem jest płyta główna (ang. backplane), zapewniająca komunikację pomiędzy poszczególnymi komponentami. W przypadku modułowych odmian sterowników jest to główna arteria łącząca mierzone wielkości z jednostką centralną.
Charakter modułów komunikacyjnych jest główną cechą odróżniającą sterownik PLC od jego odpowiednika ogólnego przeznaczenia. Wykorzystywane są tutaj bowiem różnorodne układy o dużej liczbie linii sygnałowych (analogowych i cyfrowych), które służą do monitorowania stanu obiektów zewnętrznych. Ich liczba waha się zwykle od kilkunastu (w komputerach kompaktowych) do nawet kilku tysięcy (w najbardziej rozbudowanych wersjach modułowych).

Rys. 1. Ogólna struktura sprzętowa programowalnego sterownika logicznego / Fig. 1. General hardware structure of the programmable logic controller; rys./fig. P. Bilski
Bez względu na możliwości i zakres zastosowań, wszystkie sterowniki PLC charakteryzują się cechami wspólnymi. Należą do nich przede wszystkim:
- zdolność do autonomicznej pracy przez długi czas (o ile zapewnione jest zasilanie),
- a także odporność na trudne warunki środowiskowe, takie jak silne zapylenie, duży zakres temperatur w miejscu pracy, czy wysoka wilgotność.
Odporność na uszkodzenia mechaniczne jest zapewniana przez dostatecznie wzmocnione obudowy, wytrzymujące wstrząsy, a nawet uderzenia [4].
| Generic PLC architecture According to the IEC 61131-3 norm, the PLC is the digital system, equipped with the programmable memory, working autonomously and executing the measurement and control algorithm, using the digital or analog inputs and outputs [2]. It should be then identified as the type of the specialized computer applied in more complex industrial operations. Although functionality of the controller may be implemented in the standard computer, operation reliability cannot be maintained this way (because of the hardware components and the software work regime). Its generic structure is no different than the structure of the typical computer system with components defined by John von Neumann and his associates in 1945. It includes:
The main components include:
The character of the communication modules is the main feature differing the PLC from its general purpose counterpart. The elements used here contain multiple signal lines (analog and digital), applied to monitor state of the external objects. Their number ranges between a few (in the compact computers) up to thousands (in the most complex modular versions). Discregarding the abilities and range of applications, all PLCs share some common features. These are, above all, the ability to work autonomously for long periods of time (assuming that the power source operates correctly) and the resilience to the hard environmental conditions, such as strong dust, wide range of operating temperatures, or high humidity. The resistance to the mechanical damage is ensured by the especially enforced casings, prepared to withstand stresses, or even impacts [4]. |
Dodatkowo poszczególne rodziny sterowników mogą występować w odmianach kompaktowych (w których liczba modułów do instalacji w gniazdach płyty głównej jest mała bądź w ogóle nie istnieje) lub rekonfigurowalnych (w których, w zależności od zastosowania, komputer może zostać wyposażony w dużą liczbę wymienialnych modułów wejścia-wyjścia o różnym przeznaczeniu).
Nawet najprostsze odmiany urządzeń (nazywane obecnie programowalnymi przekaźnikami logicznymi – programmable logic relays [5], ze względu na pełnienie głównie funkcji przekaźnika) dysponują (zwykle niewielką) liczbą wejść analogowych (których automatyczna konwersja do postaci dyskretnej jest przeprowadzana za pomocą przetworników o zadanej rozdzielczości, np. 10 lub 12 bitów) i cyfrowych.
Jednostki centralne wykonują programy napisane za pomocą dedykowanych języków (norma IEC 61131‑3 definiuje obecnie pięć kategorii), zaś struktura aplikacji zależy przede wszystkim od programisty.
Każda rodzina procesorów zawiera modele standardowe, jak i przystosowane do ekstremalnych warunków pracy (tzw. układy typu fail-safe). Ponadto w cyklu pracy sterownika wyróżnia się etap autodiagnostyki, w ramach której przeprowadzane jest testowanie struktury systemu w poszukiwaniu uszkodzeń. Jest to cecha zapewniająca bezawaryjną pracę przez czas liczony w latach.
Na podstawie analizy istniejących rozwiązań można jednak wyróżnić szereg właściwości, na podstawie których podejmowana jest decyzja o zaliczeniu konkretnego urządzenia do grupy zaawansowanych lub podstawowych. Są to przede wszystkim:
- moc obliczeniowa procesora. Jest ona określona przez częstotliwość zegara stanowiącego część jednostki centralnej. Na ogół jednak w danych katalogowych podawane są czasy przetwarzania pojedynczych bitów, słów lub liczb zmiennoprzecinkowych. Bardziej skompilowane procesory charakteryzują się też wsparciem dla przetwarzania wielowątkowego,
- ilość dostępnej pamięci. Umożliwia ona ładowanie większych i bardziej skomplikowanych programów. Ponadto w zaawansowanych systemach większa jest przestrzeń przeznaczona na dane, co umożliwia przechowywanie znacznej liczby zmiennych powiązanych z mierzonymi sygnałami,
- przepustowość płyty głównej. Ponieważ zadaniem sterownika jest przede wszystkim akwizycja danych oraz ich przetwarzanie, zdolność tego elementu do szybkiego przesyłania dużej ilości danych do jednostki centralnej wpływa na możliwości pracy komputera w czasie rzeczywistym (ang. Real-Time),
- wbudowane moduły komunikacyjne. Co prawda standardem są porty szeregowe typu RS‑232, RS‑485, czy RS‑422, jednak bardziej zaawansowane urządzenia integrują w jednostce centralnej dodatkowe protokoły, np. Ethernetu przemysłowego,
- wbudowane mechanizmy zabezpieczania transmisji. Gdy sterownik może być częścią większej całości, komunikując się z innymi, podobnymi urządzeniami, istotne staje się szyfrowanie danych przesyłanych między nimi. W przypadku tradycyjnej sieci komputerowej istnieje szereg protokołów zabezpieczających transmisję, sieci przemysłowe wymagają odrębnych systemów,
- współpraca z usługami sieciowymi typu serwer www. Dostatecznie potężny procesor może zostać obciążony dodatkowymi zadaniami, które obejmują np. zarządzanie systemem w sposób rozproszony, za pomocą przeglądarki internetowej.
W następnym punkcie bardziej szczegółowo opisano poszczególne cechy systemów zaawansowanych i wskazano najistotniejsze elementy odróżniające je od sterowników prostych.
| Additionally, particular families of controllers exist in the compact or reconfigurable variants. In the former, the number of input-output modules, installed in the slots of the backplane is small or does not exist at all. In the latter, depending on the particular application, the computer may be equipped with the large number of exchangeable input-output modules of different type. Even the simplest types of computers (currently called the programmable logic relays [5] because of working mainly as the signal relays) have (usually small) number of analog or digital inputs. The analog signals are acquired to the digital system using the converters of the predefined resolution, such as 10 or 12 bits. The central units execute programs written in one of the dedicated languages (the IEC 61131-3 norm defines their five categories) and the software structure depends mainly on the programmer. Each family of processors contains standard models and the ones aimed at operating in the extreme working conditions (so-called fail-safe circuits). In the program cycle of the controller, the self-diagnostics step is executed. It consists in testing the internal structure of the system, searching of faults, which degrade the nominal operation regime. It is the important yet standard feature, ensuring the failure-free operation in the years’ duration. Based on the analysis of existing solutions, the group of features distinguishing basic and advanced PLCs can be distinguished. They are as follows:
|
Parametry systemów zaawansowanych
Pomimo że podstawowa struktura sterownika PLC jest taka sama w każdym modelu, urządzenia zaliczane do bardziej zaawansowanych charakteryzują się większymi możliwościami obliczeniowymi. Sterowniki proste dysponują wolniejszymi procesorami, przetwarzającymi pojedyncze bity, słowa lub liczby zmiennoprzecinkowe w czasie rzędu mikrosekund (zegary megahercowe).
W przypadku układów zaawansowanych są to czasy rzędu dziesiątków lub pojedynczych nanosekund (zegary gigahercowe).
Procesor stanowiący serce sterownika jest wyposażony jednostkę arytmetyczno-logiczną i sterującą, a jego możliwości wyznacza oprogramowanie firmowe (ang. firmware), wszyte w sprzęt od momentu wyprodukowania. W systemie zaawansowanym może to być np. zarządzanie transmisją izochroniczną (tzw. Isochronic Real-Time – IRT) poprzez komputerową sieć przemysłową.
Podobnie wygląda porównanie dostępnej pamięci. W przypadku pamięci przeznaczonej do przechowywania programu (zwykle typu ROM, lub RAM podtrzymywanej bateryjnie) jest to dla prostych urządzeń kilkaset kB (maksymalnie 1-2 MB).
Z kolei zaawansowane systemy dysponują kilkoma (lub nawet kilkunastoma) MB, co pozwala na zbudowanie złożonej aplikacji nie tylko dokonującej prostego przetwarzania wielkości mierzonych, ale również podejmowania decyzji na tej podstawie (z uwzględnieniem algorytmów sztucznej inteligencji), a także komunikacji z innymi modułami dostępnymi w sieci. Wielkość pamięci przeznaczonej na dane pośrednio zależna jest od liczby wejść (analogowych i cyfrowych), które mogą zostać zainstalowane w systemie.
W zaawansowanych komputerach modularnych, w których można analizować jednocześnie kilka tysięcy wartości, konieczna jest pamięć rzędu kilkunastu (12–15) lub nawet kilkudziesięciu (do 60–80) MB, podczas gdy w prostszych rozwiązaniach jest to przeważnie kilkaset kB (do maksymalnie 2 MB).
Sterowniki PLC charakteryzują się dużym wyborem metod komunikacji ze światem zewnętrznym i innymi urządzeniami. W tym pierwszym przypadku dostępnych jest wiele interfejsów szeregowych, służących m.in. do komunikacji z komputerem ogólnego przeznaczenia, na którym przygotowywana jest aplikacja pomiarowo-kontrolna.

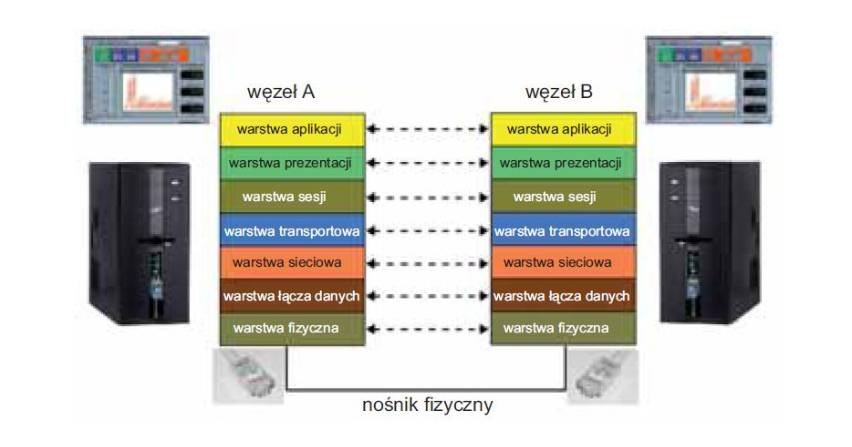
Rys. 2. Ilustracja procesu kompilacji skrośnej / Fig. 2. Illustration of the cross-compilation process; rys./fig. P. Bilski
O ile w pierwszych generacjach sterowników do programowania stosowano niezbyt wygodne terminale, obecnie powszechnie wykorzystywana jest technika kompilacji skrośnej (ang. cross-compilation – rys. 2.), w której aplikacja pisana jest na standardowym komputerze w odpowiednio dobranym języku (zgodnym ze standardem normy IEC 61131‑3 [6]), zaś skompilowany kod wynikowy kopiowany jest do pamięci sterownika.
Oba komputery są połączone właśnie za pomocą interfejsu szeregowego.
Do standardowych rozwiązań należą tutaj porty RS-232C (znany do pewnego momentu z komputerów ogólnego przeznaczenia), a także (typowo przemysłowe) RS-485 oraz RS‑422.
W nowszych urządzeniach stosowany jest interfejs USB.
| Parameters of the advanced systems Although the generic structure of the PLC is the same for each type of the device, systems considered as advanced are characterized by significantly greater computing abilities. Basic controllers are equipped with slower and simpler processors, performing computations on single bits, words or floating point numbers in the durations of microseconds (megahertz clocks). The advanced circuits are able to do the same operations faster, in durations of tens or even single nanoseconds (gigahertz clocks). The processor being the core of the PLC contains at least one arithmetical-logical unit (ALU) and control unit (CU), with capabilities determined by the firmware, embedded in the system during the manufacturing process. In the advanced system this might be, for instance, managing the isochronic transmission (Isochronic Real-Time, IRT, mode) through the computer industrial network. Similar is the result of comparing the available memory. The type aimed at storing the program (which is usually the ROM or RAM with the content maintained by the battery) has the capacity of hundreds of kB for basic controllers (maximally 1-2MB). The advanced devices are equipped with a couple or even over a dozen of MB, which enables storing the complex program responsible for not only the simple data acquisition, but also making decisions based on the available data (using, if needed, artificial intelligence methods). Such a program may also communicate with other PLCs operating in the network. The amount of memory for storing data indirectly depends on the number of inputs and outputs (both digital and analog), which may be installed in the system. In the advanced modular computers, able to analyze simultaneously thousands of samples, the capacity of 12 to 15 or even 60-80 MB is required. In the basic computer it is usually a few hundreds of kB (maximum 2 MB). The PLCs are characterized by the wide range of communication methods with the outside world and other devices. For the first purpose, multiple serial interfaces are available. They are used, for instance, to communicate with the general purpose computer, on which the measurement and control program is written. In the first generations of controllers the programming task was done using the special terminals, currently the cross-compilation technique (Fig. 2) is used. Here the application is prepared on the standard computer in the specific language (according to the IEC 1131-3 norm [6]), while the compiled code is transferred to the memory of the controller. Both computers are connected using the serial interface. Standard solutions cover RS‑232C (well known for quite a long time thanks to the general purpose computers), RS‑485 and RS‑422 (applicable mainly in the industry). In the newer devices, the USB standard is implemented as well. |
Popularnym standardem komunikacji w systemach przemysłowych jest również PROFIBUS, implementowany w jednostce centralnej lub dołączanym, dedykowanym module.
Najbardziej zaawansowane systemy dysponują natomiast modułami do komunikacji za pośrednictwem przemysłowej sieci komputerowej, np. PROFINET [7]. Za zarządzanie nimi odpowiadają dedykowane procesory komunikacyjne, odpowiedzialne również za przydział numerów IP (możliwe jest np. przypisanie do dwóch interfejsów tego samego adresu).
Inne funkcje procesora komunikacyjnego obejmują implementację protokołów szyfrujących dane, takich jak np. FTPS lub SNMPv3.
Standardowym rozwiązaniem jest także implementacja ścian ogniowych (ang. firewall), chroniących dostępu do wewnętrznej sieci przemysłowej od zewnątrz. Pomimo dużego narzutu obliczeniowego związanego ze zwiększeniem bezpieczeństwa transmisji, interfejsy komunikacyjne zapewniają prędkość rzędu nawet 1 GB na sekundę, co jest obecnie standardem w typowej lokalnej sieci komputerowej.
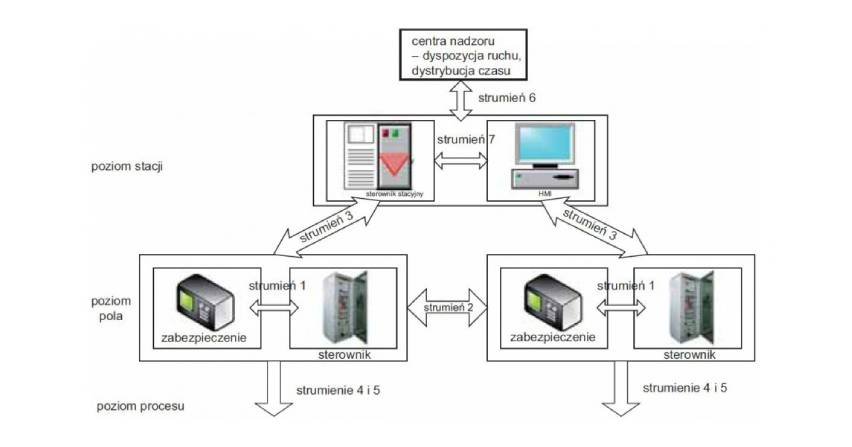
Zaawansowane procesory komunikacyjne umożliwiają również budowanie i podłączanie urządzeń do struktur nadmiarowych za pomocą np. protokołu PRP (Parallel Redundancy Protocol) [8], zgodnego z normą IEC 62439‑3. Dzięki niemu sterownik staje się równocześnie częścią kilku sieci komputerowych.
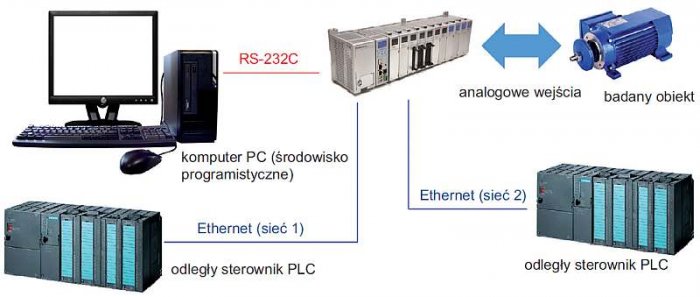
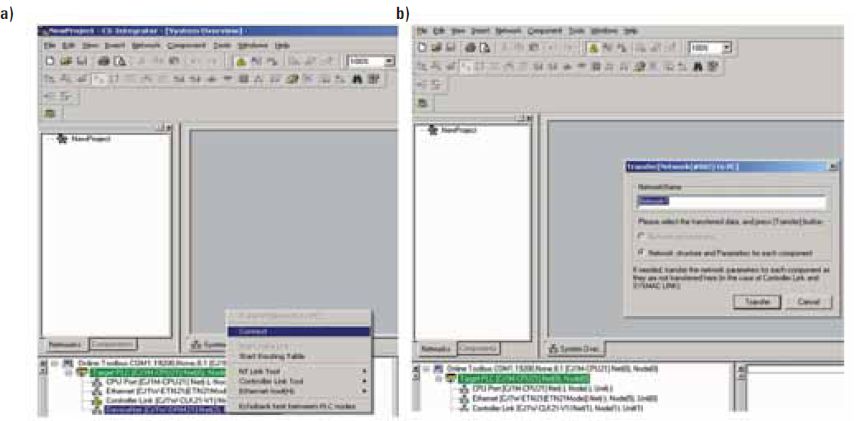
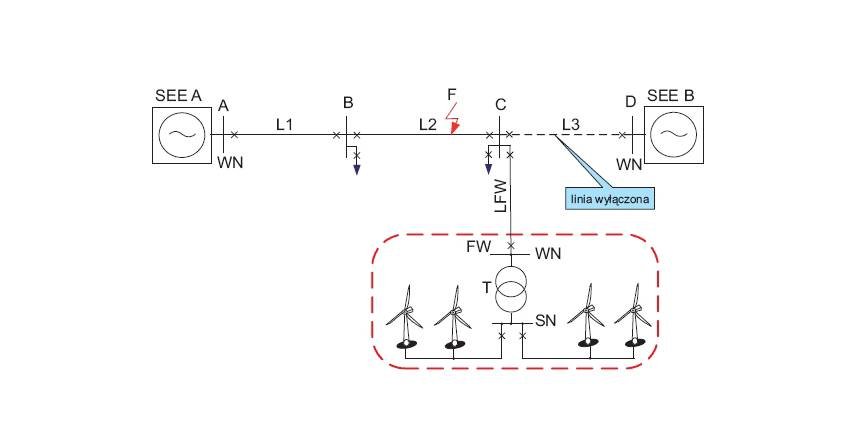
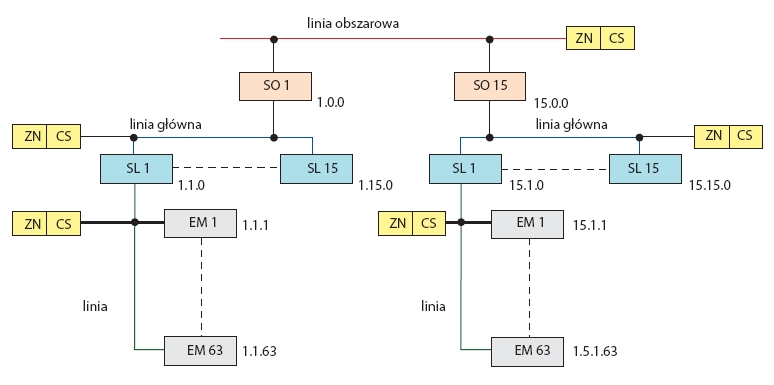
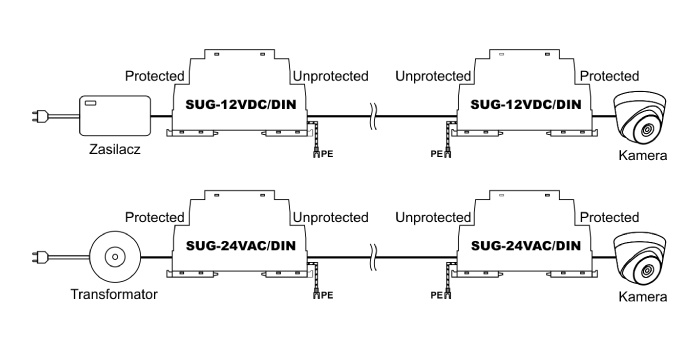
Konfiguracja systemu rozproszonego z uwzględnieniem sterownika zaawansowanego znajduje się na rys. 3.
Z możliwościami konkretnego systemu najczęściej związane są także jego rozmiary fizyczne.

Rys. 3. Struktura rozproszonego systemu pomiarowo-sterującego z udziałem zaawansowanego sterownika PLC / Fig. 3. Structure of the distributed measurement and control system including the advanced PLC; rys./fig. P. Bilski
Ponieważ proste sterowniki często występują w formie kompaktowej o niewielkich lub żadnych możliwościach rozbudowy, ich obudowy są małe. Dzięki temu mogą one zostać zainstalowane praktycznie w każdej lokalizacji.
W przeciwieństwie do nich zaawansowane sterowniki modułowe są relatywnie duże, zajmują zatem więcej miejsca, co ogranicza możliwości ich instalacji.
Z drugiej strony, obudowy modeli przeznaczonych do bardziej wymagających zastosowań dysponują dużą liczbą gniazd (ang. slot), do których podłączane są moduły wejścia-wyjścia.
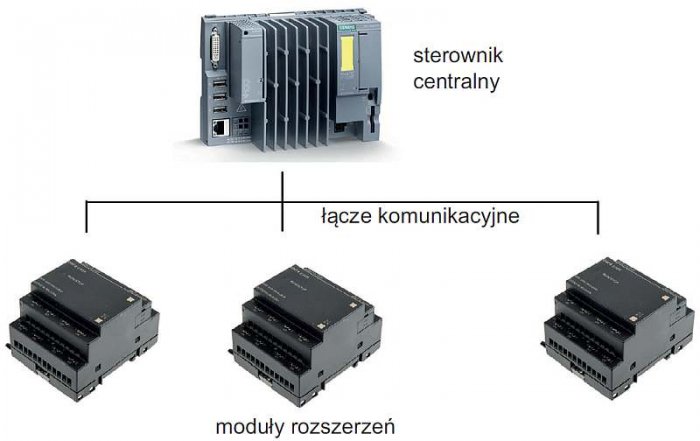
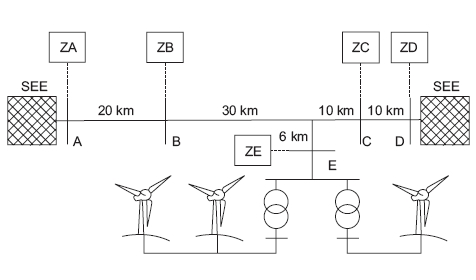
W najbardziej wymagających przypadkach pojedynczy sterownik może mieć strukturę rozproszoną, obejmującą zasięgiem obszar do 10 m. Składa się on wówczas z centralnego sterownika (ang. central controller) oraz modułów rozszerzeń (ang. expansion units). Do tych ostatnich dołączane są moduły wejścia-wyjścia, które nie mieszczą się w podstawowej obudowie.
Komunikacja między modułami odbywać się może np. za pomocą standardu PROFIBUS. Strukturę takiego sterownika przedstawiono na rys. 4.

Rys. 4. Sterownik PLC o strukturze rozproszonej / Fig. 4. The distributed structure of the PLC; rys./fig. P. Bilski
| The PROFIBUS is also the popular communication method in the industrial systems. The module is managed by the software embedded in the central unit or the expandable module. The most advanced systems are equipped with devices able to communicate using the industrial computer network, such as PROFINET [7]. It is managed by the dedicated communication processor, responsible for the assignment of IP numbers (and allowing for attaching one address to two interfaces). Other functionalities of the communication processor include implementation of the data encryption protocols, such as FTPS or SNMPv3. The standard solution is also the firewall, separating the internal network from the outside world. Suffering from the significant computational load originating from the increase of the transmission security, the communication interfaces ensure the transmission speed of even 1GB per second, which is currently the standard in the typical local area network. Advanced communication processors allow for the construction and connection of redundant network structures using the Parallel Redundancy Protocol [8], compliant with the IEC 62439-3 norm. This makes possible to connect the single PLC to multiple networks at the same time. The configuration of the distributed system including the advanced controller in presented in Fig. 3. The capabilities of the specific system in most cases are determined by its physical dimensions. Because simple controllers are often manufactured in the compact housings with little to no options of extending their structure, they are small. Therefore they can be installed virtually in every location. Contrary to them, advanced modular controllers are relatively large, requiring more space, which limits locations of their installations. On the other side, backplanes of devices aimed at more complex applications have greater number of slots, in which input-output modules can be placed. In the most demanding implementatios the single controller may have the distributed structure, extending to the range of 10m. It then consists of the central controller and expansion units. The latter are platforms of the input-output modules, which would not fit in the standard housing. The communication between the units is implemented using the popular standard, such as PROFIBUS. The structure of such a controller in presented in Fig. 4. |
Funkcjonalność systemów zaawansowanych
Dzięki swoim cechom zaawansowane sterowniki PLC znajdują zastosowanie w szeregu zadań wymagających przede wszystkim wysokiej wydajności. Krótki cykl przetwarzania (zapewniany przez szybką płytę główną oraz wysokie wartości zegara taktującego procesora) oznacza możliwość analizy dużej ilości danych pochodzących ze świata zewnętrznego. Przepustowości rzędu Gb na sekundę umożliwiają akwizycję danych ze wszystkich wejść i ich przetworzenie w czasie jednego cyklu pracy sprzętu (tzw. sweep).
Implementacja standardu przemysłowej sieci komputerowej umożliwia współpracę pomiędzy modułami rozproszonymi na zasadzie sieci deterministycznej, w której czas reakcji ograniczony jest do mikrosekund. Możliwa jest zatem synchronizacja zadań pomiarów i sterowania na większym obszarze, np. w fabryce. Dzięki temu zaawansowane systemy są stosowane m.in. w przemyśle spożywczym, samochodowym, czy podczas konstrukcji nietypowych maszyn.
Do bardziej wymagających zastosowań należy m.in. sterowanie ruchomymi maszynami (np. elementami obrotowymi). Monitorowanie ruchu (pozycji i prędkości, ale również długości badanego obiektu) we wszystkich wymiarach wsparte jest wbudowanymi sterownikami typu PID, czy implementacją modulacji długości impulsu (ang. Pulse Width Modulation – PWM). Z kolei synchronizację zapewniają precyzyjne liczniki (o zakresie sięgającym 31 bitów). Dzięki temu sterowniki zaawansowane są stosowane w zadaniach diagnostycznych skomplikowanych urządzeń mechanicznych, takich jak silniki, czy turbiny.
Dodatkowe funkcjonalności, obecne w systemach zaawansowanych, a niezwiązane dotychczas ze sterownikami PLC mogą obejmować również współpracę np. z serwerem WWW wbudowanym w procesor. Tego typu oprogramowanie umożliwia np. śledzenie na bieżąco stanu urządzenia za pomocą przeglądarki internetowej. Możliwe jest także zapisanie konfiguracji sterownika (jest to kod oprogramowania na nim uruchamianego wraz z niezbędnymi danymi) oraz wgranie jej na urządzenie, również za pomocą przeglądarki. Dzięki temu sterownik kontrolowany jest zdalnie, bez konieczności przeprowadzania operacji serwisowych bezpośrednio na nim, po uprzednim demontażu z miejsca operacji. Analogicznie, coraz częściej wymagane jest połączenie funkcjonalności sterownika PLC z możliwościami komputera klasy PC. Realizacją tego wymagania jest tzw. sterownik programowy (ang. software controller), który umożliwia uruchamianie i zarządzanie sterownikiem za pomocą oprogramowania działającego pod kontrolą systemu operacyjnego MS Windows. Takie rozwiązanie umożliwia również tworzenie algorytmów sterowania i pomiarów przy użyciu języków programowania i środowisk dotychczas dla sterowników niedostępnych, np. C++, czy Matlab.
| Functionality of the advanced systems Thanks to their features, advanced controllers may be applied to multiple tasks requiring high efficiency. The short processing cycle (ensured by the efficient backplane and fast clock of the CPU) enables the analysis of the large amount of data originating from the outside world. The throughput of 1 Gbps allows for the data acquisition from all inputs and their processing during the single machine cycle (so-called sweep). Implementation of the industrial computer network allows for the cooperation between the distributed modules in the deterministic network regime, in which the reaction time is of single microseconds. This makes possible synchronization of measurement and control tasks in the larger area, such as the factory. Thanks to that, the advanced systems are used in the food and automotive industry, or during the sophisticated machines construction. The more demanding tasks for the PLCs include control of moving machines (such as rotating elements). Monitoring movement (their position, velocity, but also length of the examined object) in all dimensions is supported by the embedded PID controllers or the implementation of the Pulse Width Modulation (PWM). The synchronization of the executed operations is ensured by the precise counters (with the range up to 31 bits). This allows the advanced controllers to be used in the diagnostic tasks of complex mechanical systems, such as motors or turbines. The additional functionalities present in the advanced systems, but not related to PLCs until now, include the cooperation with the web server embedded in the processor. This kind of the software allows for the online tracing the state of the computer using the web browser. It is also possible to save the configuration (the code of the software run in the device with the essential data) of the controller and downloading it back to the computer, also using the browser. This way the controller may be managed remotely, without the need to maintain the servicing on site, after disassembling it from the operational location. Analogously, it is more often required to combine the characteristics of the PLC with the functionality of the personal computer. This requirement is fulfilled by the so-called software controller, which enables running and managing the PLC using the software working under the MS Windows operating system. Such a solution allows for the design of the measurement and control algorithms with the help of the programming languages or computing environments typical rather to general purpose systems, such as C++ or Matlab. |
Przykłady porównawcze
Dobry przykład rozdzielenia sterowników PLC na odrębne rodziny, odpowiedzialne za realizację różnych funkcji w ramach automatyki przemysłowej można znaleźć w produktach firmy Siemens. Najnowsza seria sterowników przez nią oferowanych obejmuje cztery rodziny urządzeń SIMATIC S7 [9], różniących się pod względem większości parametrów przedstawionych w poprzednich punktach.
Do grupy urządzeń zaawansowanych zaliczane są modele S7-300, S7-400 oraz S7-1500. Największe możliwości, zarówno jeśli chodzi o moc obliczeniową, jak i dodatkowe funkcjonalności, oferuje ta ostatnia.
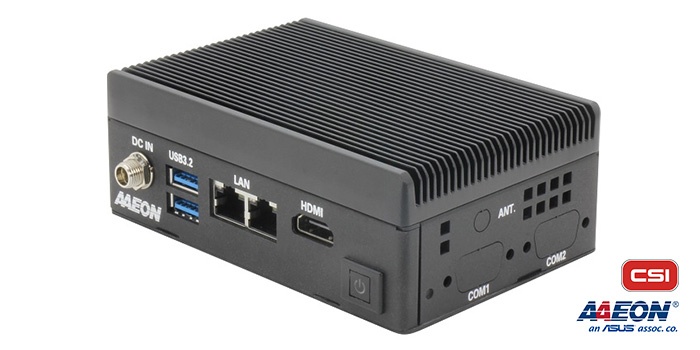
Z drugiej strony oferowane są proste sterowniki z rodziny S7-1200 (rys. 5.), występujące głównie w formie kompaktowej o niewielkich rozmiarach. Urządzenia każdej z przedstawionych rodzin występują w kilku odmianach, różniących się przede wszystkim jednostkami centralnymi.
Dla przykładu, moduły standardowe z rodziny S7-1200 mogą zawierać jeden z pięciu procesorów, oznaczanych, odpowiednio, 1211C, 1212C, 1214C, 1215C oraz 1217C.
Z kolei rodzina urządzeń przystosowanych do działań w warunkach trudnych obejmuje procesory 1212FC, 1214FC i 1215FC. Szybkość przetwarzania jednostki centralnej w tym ostatnim przypadku wynosi 85 ns dla pojedynczego bitu i 1.7 μs dla pojedynczego słowa.
Dla porównania, najbardziej zaawansowane sterowniki z rodziny S7-1500 (rys. 6.) dysponują procesorami 1511, 1513, 1515, 1516, 1517 i 1518. Ich efektywność przetwarzania pojedynczego bitu waha się od 60 do 1 ns, znacząco zatem przewyższa możliwości rodziny S7-1200.
Podobnie wygląda porównanie dostępnej pamięci. W przypadku prostych sterowników są to setki (np. 150) kB przeznaczonych na kod aplikacji oraz pojedyncze MB dla danych.
Z kolei urządzenia zaawansowane dysponują nawet 6 MB pamięci programu i 20 MB pamięci dla danych (rodzina standardowych jednostek centralnych).
Każdy model może też zostać wyposażony w moduły dodatkowe, zarówno odpowiedzialne za przetwarzanie sygnałów, jak i komunikację z innymi węzłami systemu rozproszonego:
- w przypadku rodziny S7-1200 są to na ogół prostsze moduły umożliwiające łączność za pomocą interfejsu RS-232, RS-422, RS-485 i PROFIBUS, ale także GPRS i LTE.
- w przypadku rodziny S7-1500 gama modułów jest bogatsza, obejmując (poza identycznymi podstawowymi interfejsami, jak w przypadku rodziny S7-1200) także moduły komunikacji za pomocą sieci komputerowej.
Analogicznie wypada porównanie modułów sygnałowych (linii wejścia-wyjścia).
Proste sterowniki mogą zostać wyposażone w moduły cyfrowe i analogowe o niewielkiej liczbie linii, najczęściej jest ich 4 lub 8 w jednym.
W przypadku serii S7-1500 liczba linii sygnałowych sięga nawet 32. Co więcej, możliwa jest tutaj także instalacja większej liczby modułów w gniazdach płyty głównej, zatem sterowniki zaawansowane mają znacznie większe możliwości akwizycji i przetwarzania danych.

Rys. 5. Sterownik PLC z rodziny S7-1200, przeznaczonej do zastosowań podstawowych / Fig. 5. The PLC from the S7-1200 family prepared for simple data acquisition and processing tasks; rys./fig. P. Bilski

Rys. 6. Sterownik PLC z rodziny S7-1500, przeznaczonej do zastosowań zaawansowanych / Fig. 6. The PLC from the S7-1500 family prepared for advanced operations; rys./fig. P. Bilski
| Comparative examples A good example of distinguishing between the available PLCs into separate families, responsible for different tasks in the industrial automation can be found in products of the Siemens company. The newest range of available controllers covers four groups of SIMATIC S7 devices [9]. They differ regarding the majority of parameters discussed above. The advanced computers are labeled with S7-300, S7-400 and S7-1500 indicators. The largest capabilities, both in terms of computational power and additional functionalities are presented by the last of the presented groups. On the other hand, basic controllers indicated as S7-1200 are offered (Fig. 5). They are available mainly in the compact configuration of small sizes. Devices belonging to any of the introduced families have multiple variants, with different central units. For instance, S7-1200 computers are equipped with one of five processors, indicated with symbols 1211C, 1212C, 1214C, 1215C and 1217C. Additionally the family of devices ready to operate in the harsh conditions covers CPUs 1212FC, 1214FC and 1215FC. The processing efficiency of the processor in the latter case is 85 ns for the single bit and 1.7 μs for the single word. The compared advanced controllers from the S7-1500 family (Fig. 6) are equipped with the processors 1511, 1513, 1515, 1516, 1517 and 1518. Their processing speed for the single bit ranges between 60 to 1 ns and is significantly greater than the representatives of the S7-1200 group. Similar are results of the comparison regarding the available memory. In the case of basic controllers we have hundreds (like 150) of kilobytes to store the program code and single megabytes for storing data. The advanced devices have even 6MB of the program memory and 20MB of the data memory (the case of the standard CPUs). Each model may also be extended by the additional units, responsible for both the signal processing and communication with remote nodes in the distributed system:
Basic controllers are equipped with digital and analog devices with small number of lines, such as 4 to 8 in the single casing. The S7-1500 family has modules with even 32 lines in the single casing. Because the number of slots in the backplane is also greater, the overall number of lines significantly exceeds the abilities of the basic counterparts. |
Podsumowanie
Ciągły rozwój technik komputerowych sprzyja wzbogacaniu najnowszych komputerów specjalizowanych w kolejne funkcje. Ponieważ możliwe jest instalowanie w nich szybszych procesorów, umożliwiających pracę wielozadaniową, obciążane są one dodatkowymi zadaniami, dzięki którym współczesny sterownik PLC nie pełni już roli prostego przekaźnika, lecz stanowi autonomiczny system akwizycji danych i realizacji algorytmów sterujących, operujących nawet na tysiącach zmiennych.
Dodatkowo standardem stała się bezpieczna komunikacja pomiędzy poszczególnymi węzłami za pośrednictwem szybkich interfejsów komputerowej sieci przemysłowej.
Należy oczekiwać w nadchodzącej przyszłości dalszej integracji następnych funkcji w pojedynczym sterowniku, dzięki czemu będzie on coraz bardziej przypominać możliwościami standardowy komputer PC, zapewniający jednak większą niezawodność dzięki odpowiednio zaprojektowanej konstrukcji.
Realizacja bardziej skomplikowanych zadań diagnostycznych i analitycznych wymaga jednak indywidualnego podejścia do projektowania oprogramowania. Obecnie wykracza ono poza proste schematy graficzne, tworzone przez inżynierów z innych dziedzin, niż informatyka, czy elektronika.
Aby zatem zmusić sprzęt do wykonywania wyznaczonych zadań, konieczne staje się stosowanie złożonego podejścia do produkcji aplikacji, w czym pomagają narzędzia będące częścią wsparcia programowego zaawansowanych systemów.
| Summary The constant development of the computer technologies is compliant to the effect of introducing the newest specialized computers with additional functions. Because they are equipped with more powerful processors, able to perform the multitasking operations, they can be also assigned new responsibilities. Therefore the modern PLC is no longer the simple relay, but the fully autonomous data acquisition system with advanced control algorithms implemented, operating even on thousands of variables. The additional standard is the safe data transmission between the particular nodes of the distributed system. It is now possible thanks to the fast industrial network interfaces. In the nearest future the further integration of multiple functions in the single controller should be expected. Its abilities will be similar to the ones of the standard PC, but operating with much greater reliability thanks to the specific hardware and software structure. Implementation of the more complex diagnostic and analysis tasks requires the individual approach to the software design. Currently it is no longer just the realization of simple graphical schemes, created by the non-professional engineers from other than computer science or electronics domains. To make the computer work to execute selected tasks,s it is necessary to apply the complex approach to the software production, which is supported by the tools offered by most of the PLC manufacturers. |
Literatura / Bibliography
- W. Bolton, „Programmable Logic Controllers, 4th Edition,” Elsevier, 2006.
- „Programmable logic controllers. Basic level,” Festo Didactic GMBH, 2002.
- K.T. Erickson, „Programmable Logic Controllers: An Emphasis on Design and Applications,” 2015.
- P. Dvorak, „Rugged ABB PLC simplifies control in extreme environments,” 2013, online: http://www.windpowerengineering.com/design/electrical/controls/rugged-abb-plc-simplifies-control-in-extreme-environments/
- „Programmable relays,” online: http://www.bb-elec.com/Products/Controllers-Computing/Controllers.aspx
- „IEC 61131-3:2013 Programmable controllers - Part 3: Programming languages,” 2013, online: https://webstore.iec.ch/publication/4552
- „PROFInet. Technologie i aplikacje,” PROFIBUS International Support Center, online: http://we.pb.edu.pl/~files/PROFInet_pl.pdf
- „Industrial communication networks – high availability automation networks – Part 3: Parallel Redundancy Protocol (PRP) and High-availability Seamless Redundancy (HSR)”, online: https://web.archive.org/web/20120308104543/http://lamspeople.epfl.ch/kirrmann/Pubs/IEC_61439-3/WG15-17-13_IEC_62439-3_FDIS_HK_111111x.pdf
- „System overview SIMATIC Controllers,” online: http://w3.siemens.com/mcms/programmable-logic-controller/en/system-overview/Pages/Default.aspx