Sposoby sterowania serwonapędem Junma Pulse za pomocą sterownika PLC

Postępująca miniaturyzacja powoduje, że producenci zobowiązani są do dostarczania urządzeń wykonawczych, które są w stanie wykonywać przemieszczenia o bardzo małych wartościach, w dodatku z bardzo dużą...
Postępująca miniaturyzacja powoduje, że producenci zobowiązani są do dostarczania urządzeń wykonawczych, które są w stanie wykonywać przemieszczenia o bardzo małych wartościach, w dodatku z bardzo dużą precyzją. Urządzenia wykonawcze, które są w stanie spełniać takie wymagania, to serwonapędy, przy czym najbardziej precyzyjne urządzenia tego typu to serwonapędy elektryczne. W artykule zostanie przedstawiony sposób uruchomienia i sterowania serwonapędu Junma Pulse [1] za pomocą sterownika CJ1M-CPU21.
Adresowanie modułów cyfrowych wejść i wyjść w obszarze pamięci sterowników PLC
Dostępne na rynku modułowe i kompaktowe sterowniki PLC posiadają duży wybór dodatkowych modułów cyfrowych (tzw. modułów rozszerzających możliwości samego sterownika), takich jak: podstawowych, mieszanych...
Dostępne na rynku modułowe i kompaktowe sterowniki PLC posiadają duży wybór dodatkowych modułów cyfrowych (tzw. modułów rozszerzających możliwości samego sterownika), takich jak: podstawowych, mieszanych wejść i wyjść (digital input, digital output), specjalnych wejść, w których sygnałem wejściowym jest napięcie przemienne AC lub AC/DC, wejść i wyjść TTL, przerwaniowych, szybkich (impulsowych) wejść, szybkiego licznika, wyjść przekaźnikowych.
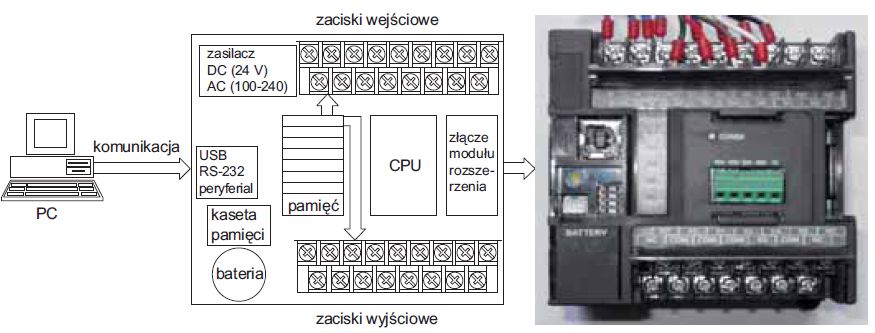
Konfiguracja modułów rozszerzeń – cyfrowych wejść i wyjść sterowników PLC
Wzrastające wymogi co do niezawodności i szybkości podejmowania decyzji (reakcji na zdarzenia), częste zmiany konfiguracyjne i rozbudowa układów sterowania wynikająca ze zmian technologicznych, ułatwienia...
Wzrastające wymogi co do niezawodności i szybkości podejmowania decyzji (reakcji na zdarzenia), częste zmiany konfiguracyjne i rozbudowa układów sterowania wynikająca ze zmian technologicznych, ułatwienia diagnostyki i serwisu, czy znaczne zmniejszenie kosztów itp., wymusiły na konstruktorach sterowników PLC opracowanie takich układów wbudowanych wejść i wyjść oraz modułów rozszerzeń, które mogłyby sprostać tym wymaganiom.
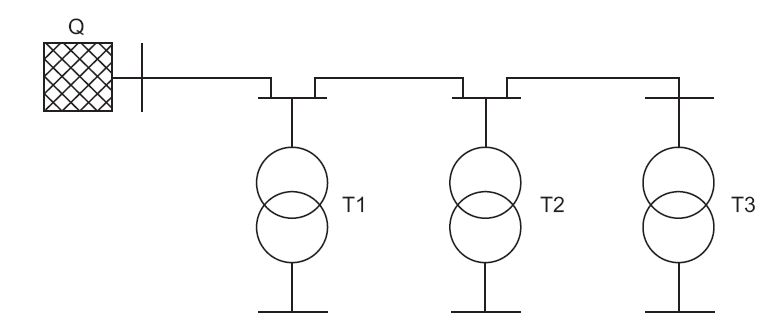
Działanie zabezpieczeń nadprądowych w stanach nieustalonych towarzyszących włączaniu nieobciążonych transformatorów SN (część 1.)
Włączenie transformatora do sieci elektroenergetycznej powoduje powstanie stanów nieustalonych prądu. W wielu przypadkach są to tzw. udary prądu magnesującego. Maksymalna wartość prądu zależy m.in. od...
Włączenie transformatora do sieci elektroenergetycznej powoduje powstanie stanów nieustalonych prądu. W wielu przypadkach są to tzw. udary prądu magnesującego. Maksymalna wartość prądu zależy m.in. od cech konstrukcyjnych i parametrów technicznych transformatora, tj. właściwości magnetycznych blachy, z której wykonano rdzeń, budowy rdzenia, mocy znamionowej, układu połączeń uzwojeń, a także od odległości uzwojenia magnesującego od rdzenia.
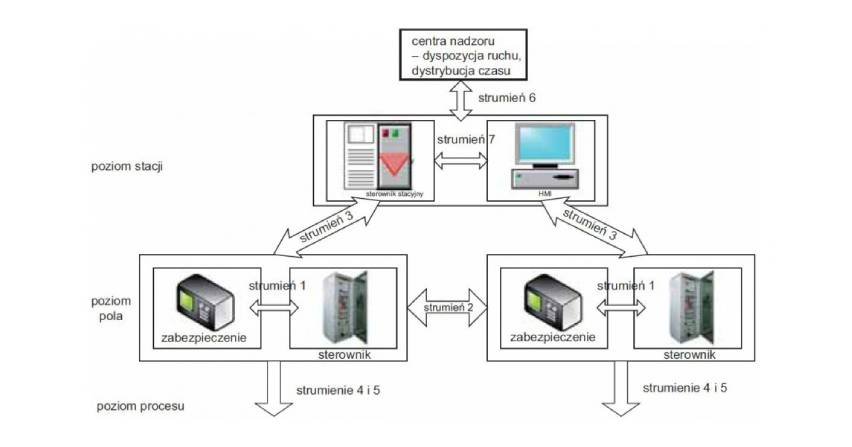
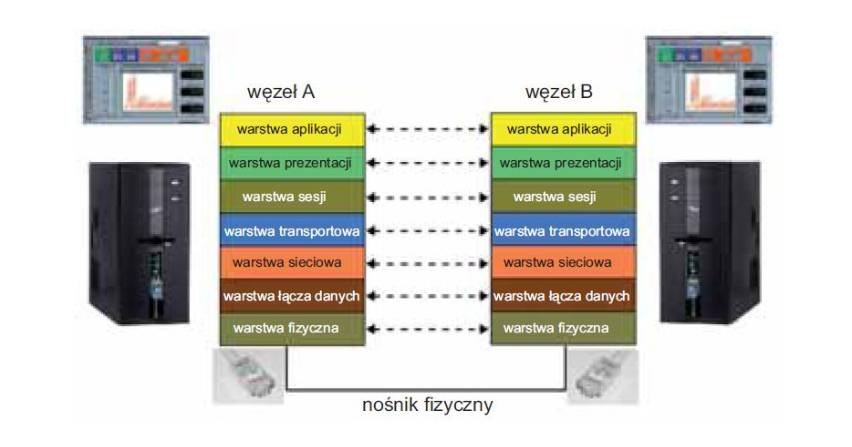
Komunikacja zgodna z IEC 61850
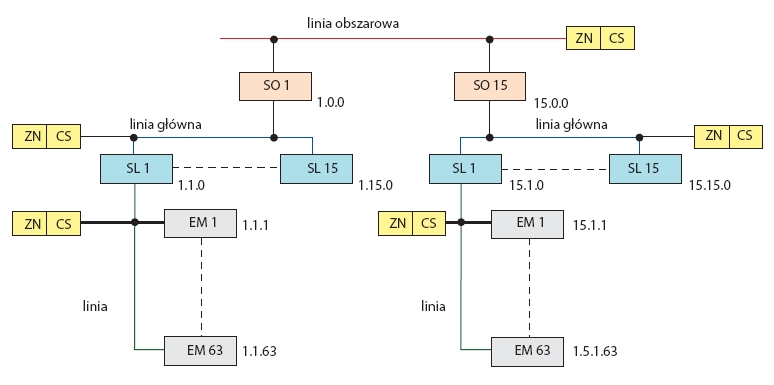
Standard IEC 61850 systematyzuje zagadnienia związane z wymianą danych w systemach elektroenergetycznych. Norma rewolucjonizuje podejście do realizacji systemów stacyjnych, proponując obiektowy model...
Standard IEC 61850 systematyzuje zagadnienia związane z wymianą danych w systemach elektroenergetycznych. Norma rewolucjonizuje podejście do realizacji systemów stacyjnych, proponując obiektowy model danych, obejmujący swoim zasięgiem wszystkie trzy poziomy komunikacji wyróżniane w stacji elektroenergetycznej: poziom procesu, pola, stacji oraz zastosowanie wspólnej infrastruktury komunikacyjnej opartej na sieci Ethernet.
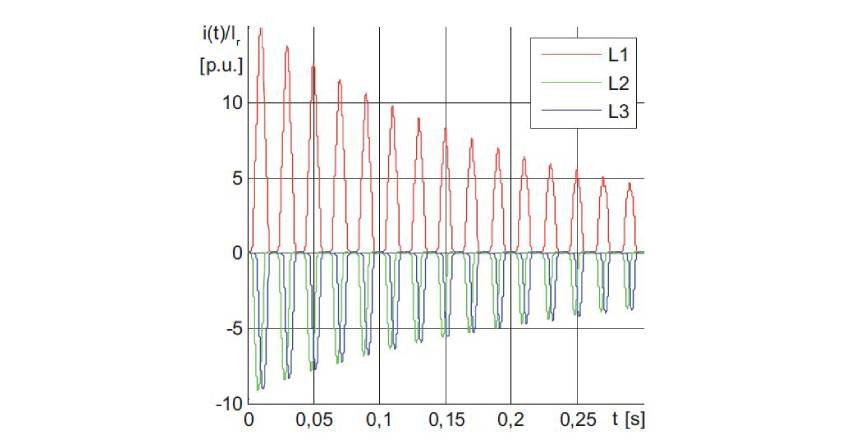
Działanie zabezpieczeń nadprądowych w stanach nieustalonych towarzyszących włączaniu nieobciążonych transformatorów SN (część 2.)
Włączeniu transformatora do systemu elektroenergetycznego (SEE) towarzyszy stan nieustalony prądu zasilającego. Zjawisko to ma charakter losowy, ponieważ jest zdeterminowane wieloma czynnikami. Zależy...
Włączeniu transformatora do systemu elektroenergetycznego (SEE) towarzyszy stan nieustalony prądu zasilającego. Zjawisko to ma charakter losowy, ponieważ jest zdeterminowane wieloma czynnikami. Zależy m.in. od cech konstrukcyjnych i parametrów technicznych transformatora i kąta fazowego napięcia zasilającego w chwili włączenia transformatora. Wybrane zagadnienia związane z udarami prądu magnesującego oraz ich wpływem na prawidłowość działania zabezpieczeń nadprądowych transformatorów SN omówione...
Technologie przesyłania danych w systemach automatyki przemysłowej
Aplikacje przemysłowe są jednymi z najbardziej zaawansowanych i wymagających, zarówno, jeśli chodzi o wykorzystywany sprzęt, jak i metody komunikacji pomiędzy modułami wykonawczymi. Ze względu na fundamentalne...
Aplikacje przemysłowe są jednymi z najbardziej zaawansowanych i wymagających, zarówno, jeśli chodzi o wykorzystywany sprzęt, jak i metody komunikacji pomiędzy modułami wykonawczymi. Ze względu na fundamentalne znaczenie dla gospodarki oraz społeczeństwa, systemy wykorzystywane w przemyśle (cukrownictwo, petrochemia, hutnictwo itp.) muszą być projektowane ze szczególną precyzją. Ich działanie musi być również niezawodne, co sprzyja rozwijaniu metod monitorowania i diagnostyki. Pojawienie się...
Podstawy sterowania logicznego

W większości opracowań tematyka związana z syntezą układów logicznych jest przedstawiana przede wszystkim w formie zagadnień związanych z projektowaniem i optymalizacją budowy układów cyfrowych. Stosunkowo...
W większości opracowań tematyka związana z syntezą układów logicznych jest przedstawiana przede wszystkim w formie zagadnień związanych z projektowaniem i optymalizacją budowy układów cyfrowych. Stosunkowo mały nacisk kładzie się na fakt wykorzystania tych zagadnień w projektowaniu oprogramowania dla układów sterownikowych. Podczas tworzenia programu, który później zostanie załadowany do sterownika, należy zwrócić uwagę, aby tworzony algorytm sterowania był najbardziej optymalny. W tym kontekście...
Zasady doboru aparatury pomiarowej dla układów elektroenergetycznej automatyki zabezpieczeniowej jednostek wytwórczych
Przekładniki prądowe i napięciowe wchodzą w skład elementów wejściowych struktury układu automatyki zabezpieczeniowej. Służą do zbierania i wstępnego przetwarzania wielkości fizycznych, charakteryzujących...
Przekładniki prądowe i napięciowe wchodzą w skład elementów wejściowych struktury układu automatyki zabezpieczeniowej. Służą do zbierania i wstępnego przetwarzania wielkości fizycznych, charakteryzujących stan pracy obiektu chronionego, na znormalizowane wartości wtórne, odpowiednie do zasilania dalszych układów, proporcjonalne do wielkości pierwotnych, zgodnie ze zdefiniowanym współczynnikiem transformacji – przekładnią.
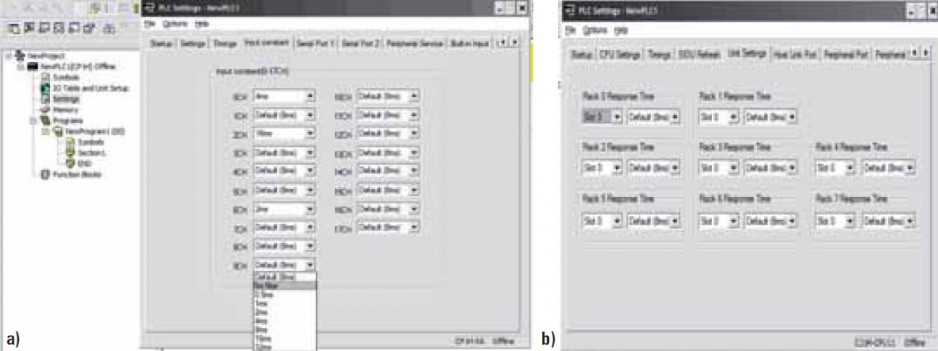
Konfiguracja przemysłowych sieci sterowników PLC za pomocą pakietu CX-ONE
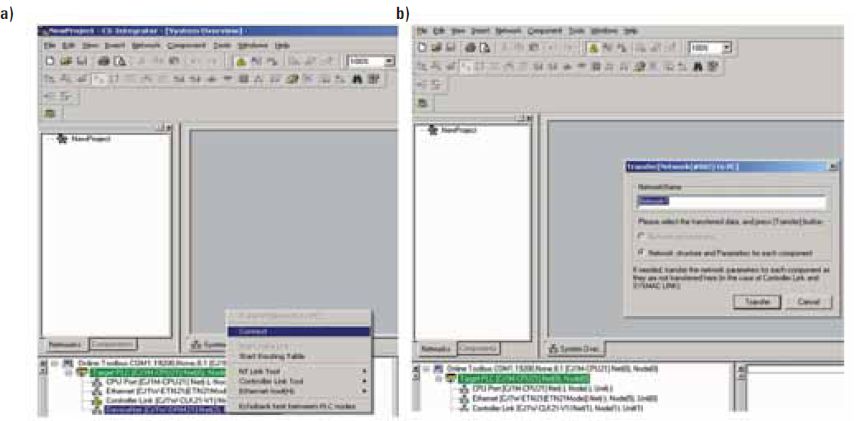
Na rynku znajduje się wielu producentów oferujących modułowe sterowniki PLC. Różnią się one liczbą dostępnych funkcji oraz językiem programowania stosowanym do konfiguracji urządzenia. Zastosowanie...
Na rynku znajduje się wielu producentów oferujących modułowe sterowniki PLC. Różnią się one liczbą dostępnych funkcji oraz językiem programowania stosowanym do konfiguracji urządzenia. Zastosowanie dedykowanej aplikacji pozwala użytkownikowi na swobodny dostęp do modułów połączonych w sieci przemysłowej za pomocą jednego interfejsu komunikacyjnego. Przyczynia się to do uproszczenia programowania oraz umożliwia zdalny dostęp i serwis urządzenia.
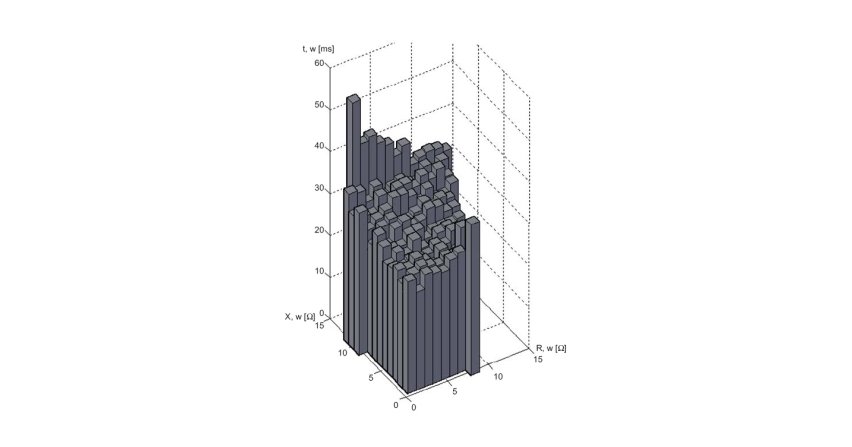
Poprawność decyzji podejmowanych przez zabezpieczenia odległościowe linii WN
Zabezpieczenie odległościowe to element elektroenergetycznej automatyki zabezpieczeniowej (EAZ), który służy m.in. do ochrony linii WN przed skutkami zwarć wielkoprądowych. Algorytm decyzyjny tego zabezpieczenia...
Zabezpieczenie odległościowe to element elektroenergetycznej automatyki zabezpieczeniowej (EAZ), który służy m.in. do ochrony linii WN przed skutkami zwarć wielkoprądowych. Algorytm decyzyjny tego zabezpieczenia bazuje na kryterium podimpedancyjnym. Zasada działania polega na wyznaczaniu parametrów wektora impedancji na podstawie sygnałów napięciowych i prądowych.
Struktura, funkcjonalność i zastosowania systemów wbudowanych
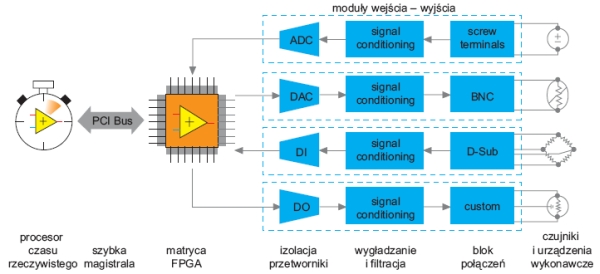
Różnorodność urządzeń oraz systemów związanych z działalnością człowieka rośnie znacząco wraz z rozwojem techniki i nauki. Techniki mikroprocesorowe stosowane są praktycznie wszędzie i nie stanowią już...
Różnorodność urządzeń oraz systemów związanych z działalnością człowieka rośnie znacząco wraz z rozwojem techniki i nauki. Techniki mikroprocesorowe stosowane są praktycznie wszędzie i nie stanowią już tylko uniwersalnych maszyn obliczeniowych, lecz wykorzystywane są w modułach sterujących pracą praktycznie wszystkich systemów wykorzystywanych w przemyśle oraz w życiu codziennym.
Funkcjonalny odpowiednik przekaźnika typu N

Urządzenia przekaźnikowe stanowią jedną z najszerszych grup urządzeń elektrycznych stosowanych na kolei. Przekaźniki wykorzystywane są w układach sterowania, sygnalizacji i zabezpieczeń. Przekaźniki prądu...
Urządzenia przekaźnikowe stanowią jedną z najszerszych grup urządzeń elektrycznych stosowanych na kolei. Przekaźniki wykorzystywane są w układach sterowania, sygnalizacji i zabezpieczeń. Przekaźniki prądu stałego najczęściej są urządzeniami elektromagnetycznymi.
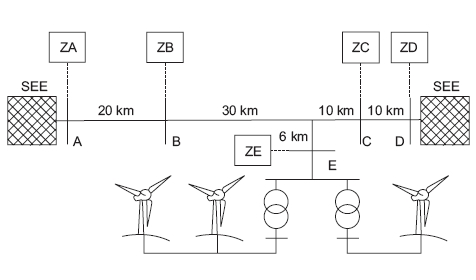
Funkcjonowanie elektroenergetycznej automatyki zabezpieczeniowej sieci WN przy niewielkiej wartości prądu zwarciowego generowanego przez farmę wiatrową
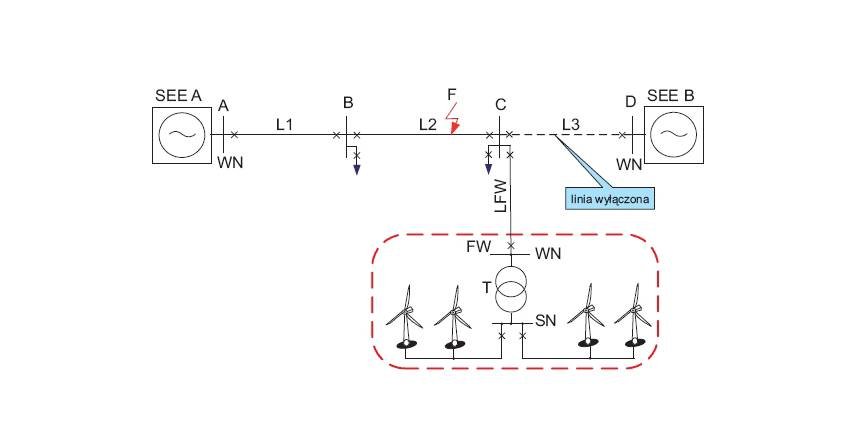
Prawidłowe funkcjonowanie elektroenergetycznej automatyki zabezpieczeniowej sieci WN w wielu przypadkach warunkowane jest odpowiednio dużą wartością prądu zwarciowego. Niewielka wartość prądu zwarciowego...
Prawidłowe funkcjonowanie elektroenergetycznej automatyki zabezpieczeniowej sieci WN w wielu przypadkach warunkowane jest odpowiednio dużą wartością prądu zwarciowego. Niewielka wartość prądu zwarciowego generowanego przez farmę wiatrową w niektórych stanach pracy sieci WN może być przyczyną problemów związanych z prawidłową identyfikacją i lokalizacją zakłóceń zwarciowych. Niewłaściwe działanie elektroenergetycznej automatyki zabezpieczeniowej w takich układach pracy może generować zagrożenie zarówno...
Nowatorski układ automatyki SZR w rozdzielnicach średnich napięć

Nowatorski układ automatyki SZR ma zastosowanie w rozdzielnicach SN w izolacji napowietrznej średniego napięcia. Rozwiązanie zostanie pokazane na przykładzie trójpolowej rozdzielnicy typu RSL 24 kV (2...
Nowatorski układ automatyki SZR ma zastosowanie w rozdzielnicach SN w izolacji napowietrznej średniego napięcia. Rozwiązanie zostanie pokazane na przykładzie trójpolowej rozdzielnicy typu RSL 24 kV (2 pola liniowe i pole transformatorowo-pomiarowe) w wykonaniu łukoochronnym. Pola liniowe wyposażone są w rozłączniki OM(B)-24/T/P/UD/160/R z napędami silnikowymi NSW30. Pole transformatorowe wyposażone jest w rozłącznik OMB-24/T/P/BDT/160 z napędem ręcznym typu NRK.
Podtrzymanie zasilania w układach elektronicznych na przykładzie zabezpieczeń energetycznych
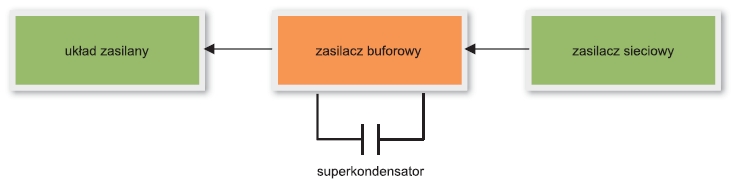
W systemach elektronicznych często zachodzi potrzeba zapewnienia pracy urządzenia przez określony czas po zaniku napięcia zasilania. Związane jest to z koniecznością realizacji szeregu funkcji przygotowujących...
W systemach elektronicznych często zachodzi potrzeba zapewnienia pracy urządzenia przez określony czas po zaniku napięcia zasilania. Związane jest to z koniecznością realizacji szeregu funkcji przygotowujących system do wyłączenia oraz sygnalizacją tego stanu do zewnętrznych systemów. Istnieje również konieczność przesłania informacji diagnostycznych o monitorowanym systemie do systemu nadrzędnego.
Zabezpieczenia odległościowe i ich testowanie
Dynamiczny rozwój techniki cyfrowej spowodował szerokie jej zastosowanie w elektroenergetyce. Liczne zalety sprawiły, że dotychczas stosowane rozwiązania elektromechaniczne i elektroniczne analogowe zabezpieczeń...
Dynamiczny rozwój techniki cyfrowej spowodował szerokie jej zastosowanie w elektroenergetyce. Liczne zalety sprawiły, że dotychczas stosowane rozwiązania elektromechaniczne i elektroniczne analogowe zabezpieczeń zostały w większości zastąpione rozwiązaniami cyfrowymi. Zastosowanie mikroprocesorów i rozwój oprogramowania umożliwiły koncentrację wielu funkcji zabezpieczeniowych w ramach jednego urządzenia, nazywanego cyfrowym zespołem automatyki zabezpieczeniowej.
Charakterystyka i zastosowania układów wykonawczych w systemach automatyki
Układy automatyki są obecnie jednymi z najintensywniej rozwijanych systemów elektroniki i elektrotechniki. Ułatwiają one pracę zarówno instalacji przemysłowych, takich jak elektrownie, cukrownie, czy fabryki...
Układy automatyki są obecnie jednymi z najintensywniej rozwijanych systemów elektroniki i elektrotechniki. Ułatwiają one pracę zarówno instalacji przemysłowych, takich jak elektrownie, cukrownie, czy fabryki odzieży, jak i budynków komercyjnych, m.in. biurowców czy centrów handlowych. Pomimo że ogólna idea takiego systemu pozostaje niezmienna od kilkudziesięciu lat, wprowadzenie układów mikroprocesorowych oraz zaawansowanych technologii czujników i elementów wykonawczych pozwoliło znacząco rozszerzyć...
Układy SZR

Układy samoczynnego załączania rezerwy (SZR) pozwalają na automatyczne załączanie odbiorników do toru rezerwowego w przypadku zaniku napięcia w torze zasilania podstawowego. Po powrocie napięcia w torze...
Układy samoczynnego załączania rezerwy (SZR) pozwalają na automatyczne załączanie odbiorników do toru rezerwowego w przypadku zaniku napięcia w torze zasilania podstawowego. Po powrocie napięcia w torze zasilania podstawowego następuje automatyczny powrót układu zasilania do stanu pierwotnego. Układy SZR są najczęściej stosowane w obiektach, w których wymagana jest ciągłość zasilania, na przykład w szpitalach, bankach czy budynkach użyteczności publicznej. Szpital jest obiektem, w którym nawet krótka...
Media transmisyjne stosowane w systemie sterowania KNX
W inteligentnych budynkach występują różne instalacje i systemy sterowania. Systemy te zwykle dotyczą takich obszarów zastosowań, jak: bezpieczeństwo, komfort klimatyczny, zarządzanie energią oraz automatyzacja...
W inteligentnych budynkach występują różne instalacje i systemy sterowania. Systemy te zwykle dotyczą takich obszarów zastosowań, jak: bezpieczeństwo, komfort klimatyczny, zarządzanie energią oraz automatyzacja miejsc pracy. Szczególne znaczenie w systemach automatyki budynkowej mają tzw. otwarte systemy sterowania, do których należy m.in. system KNX. System ten, wykorzystujący logikę sterowania rozproszonego, stosowany jest głównie w obiektach mieszkalnych oraz w obiektach użyteczności publicznej.
Odwzorowanie indukcyjności wzajemnych w modelu obwodowym maszyny synchronicznej jawnobiegunowej
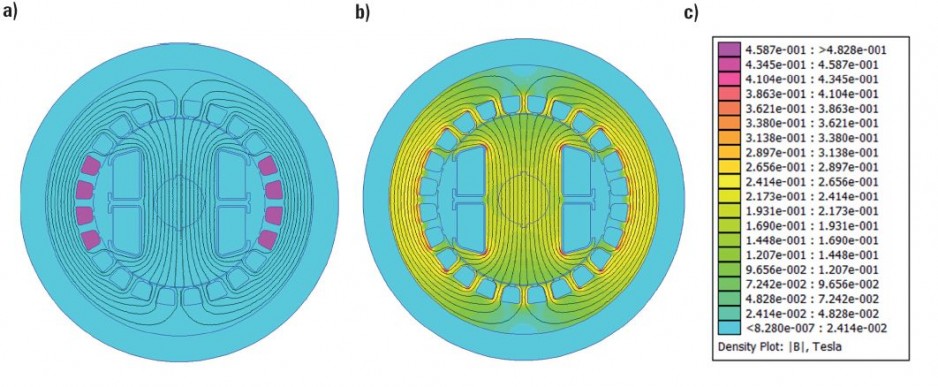
W równaniach strumieniowo-napięciowych opisujących model matematyczny maszyny synchronicznej jawnobiegunowej w układzie osi naturalnych związanych ze stojanem oraz z wirnikiem (bez obwodów tłumiących)...
W równaniach strumieniowo-napięciowych opisujących model matematyczny maszyny synchronicznej jawnobiegunowej w układzie osi naturalnych związanych ze stojanem oraz z wirnikiem (bez obwodów tłumiących) z uwzględnieniem elektrycznego kąta położenia wirnika ϑ występują rozkłady:
indukcyjności własnych uzwojeń pasmowych stojana La, Lb, Lc oraz uzwojenia wzbudzenia Lf,
indukcyjności wzajemnych uzwojeń pasmowych stojana Lab, Lbc, Lca, Lba, Lcb, Lac.
indukcyjności wzajemnych uzwojeń pasmowych stojana...
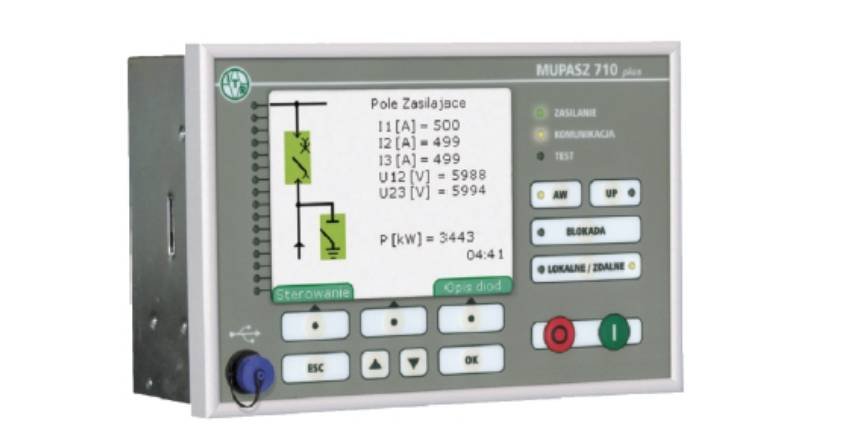
Implementacja magistrali CANBUS oraz protokołu transmisji PPM2 na przykładzie sterownika polowego MUPASZ 710plus

Interfejs CAN powstał na potrzeby przemysłu motoryzacyjnego, ale ze względu na swoje zalety, takie jak odporność na błędy transmisji i wprowadzony standard, znalazł zastosowanie również w innych gałęziach...
Interfejs CAN powstał na potrzeby przemysłu motoryzacyjnego, ale ze względu na swoje zalety, takie jak odporność na błędy transmisji i wprowadzony standard, znalazł zastosowanie również w innych gałęziach przemysłu. Jego szczególnie intensywny rozwój nastąpił w dziedzinie szeroko pojętej automatyki, w tym w obszarze inteligentnych czujników, uniwersalnych modułów sterowania oraz w napędach.
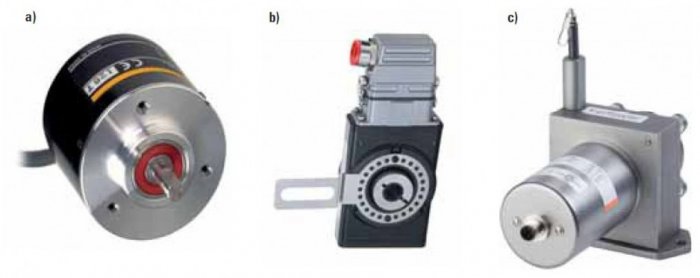
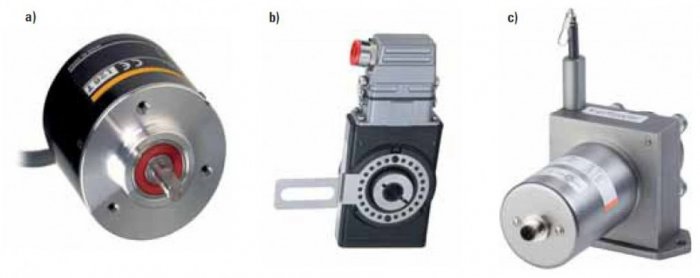
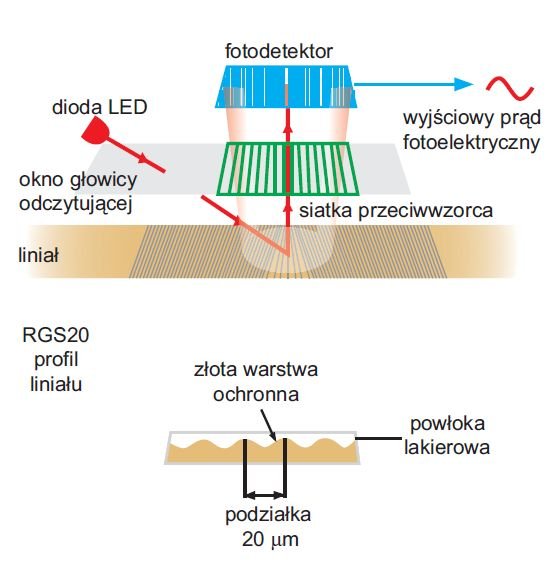
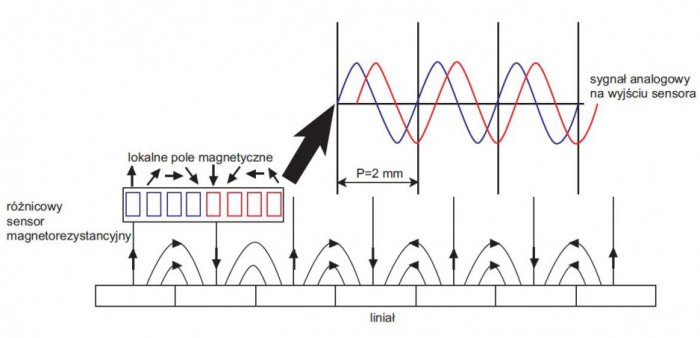
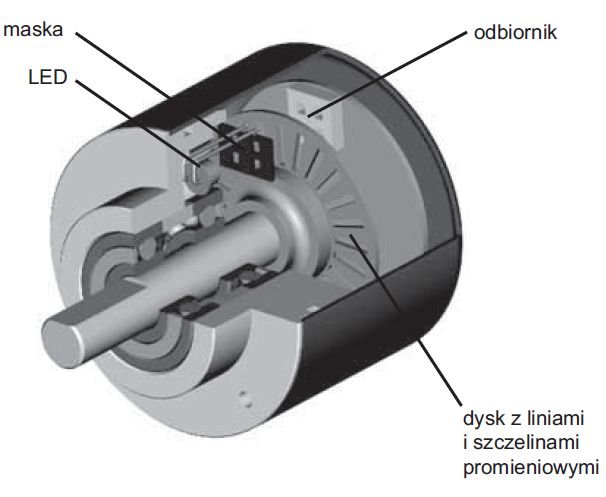
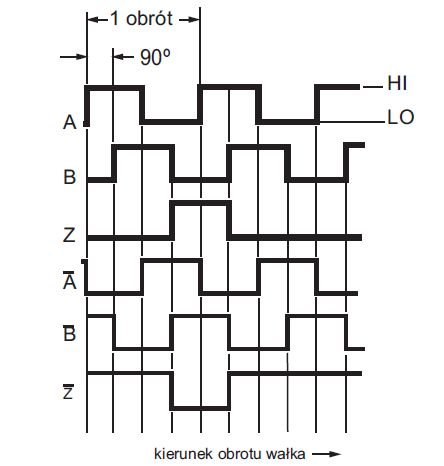
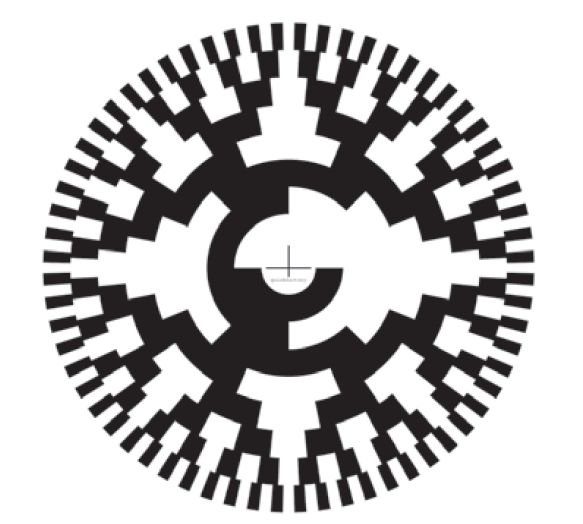
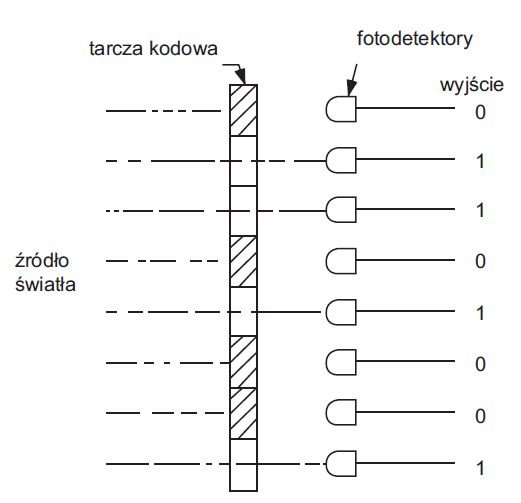
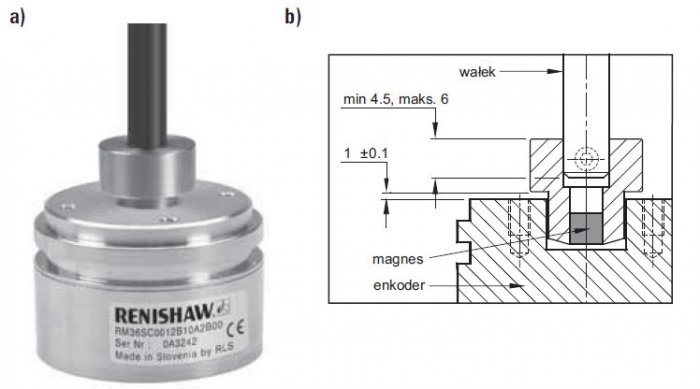
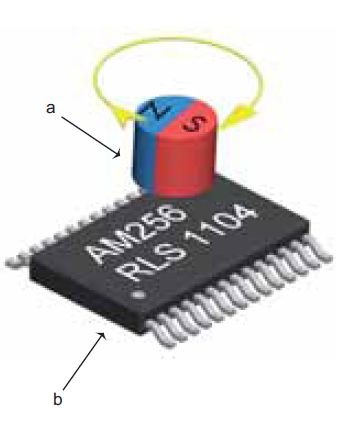
Precyzyjne pomiary przesunięcia i kąta obrotu – wprowadzenie
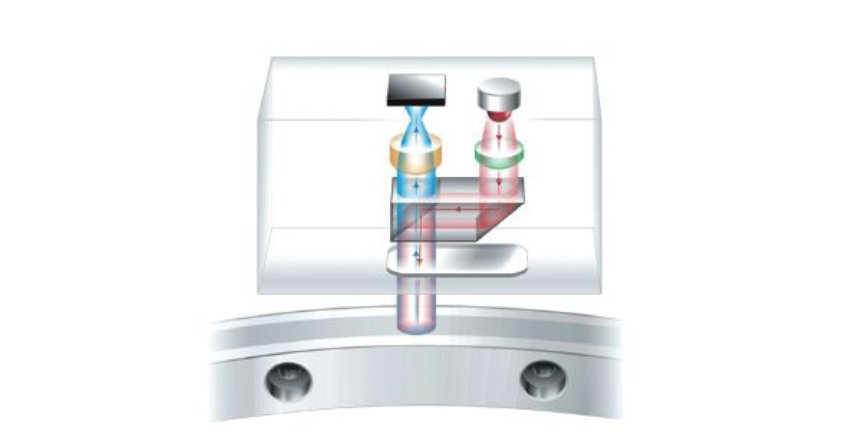
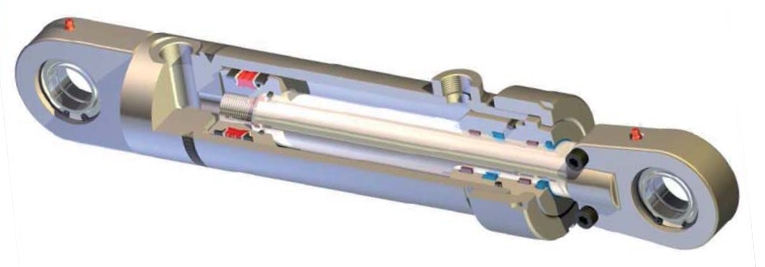
Urządzenia wykonawcze są stosowane w zwykłych zadaniach, gdzie jeden napęd realizuje pojedynczy ruch, jak również w zaawansowanych systemach, gdzie wiele urządzeń wykonawczych wykonuje skoordynowane i...
Urządzenia wykonawcze są stosowane w zwykłych zadaniach, gdzie jeden napęd realizuje pojedynczy ruch, jak również w zaawansowanych systemach, gdzie wiele urządzeń wykonawczych wykonuje skoordynowane i kontrolowane przemieszczenia (np. roboty przemysłowe). Proste zadania są łatwo realizowane i zwykle wymagają nieskomplikowanych rozwiązań do kontroli położenia urządzenia wykonawczego. Występują jednak bardziej złożone systemy zintegrowane, które realizują złożone zadania wymagające kontroli przemieszczeń...
Sterowniki polowe SN/nn z zaimplementowanym edytorem funkcji logicznych ELF
Instytut Tele- i Radiotechniczny od początku lat 90. prowadzi prace nad rozwojem cyfrowej techniki zabezpieczeniowej. Ich owocem było opracowanie i wdrożenie pierwszego polskiego mikroprocesorowego sterownika...
Instytut Tele- i Radiotechniczny od początku lat 90. prowadzi prace nad rozwojem cyfrowej techniki zabezpieczeniowej. Ich owocem było opracowanie i wdrożenie pierwszego polskiego mikroprocesorowego sterownika polowego SN. Od tego wydarzenia mija 20 lat. Obecnie na rynku znajduje się już szósta generacja sterownika o nazwie handlowej MUPASZ 710plus. Popularność na rynku krajowym, jak i na rynkach zagranicznych, zdobył on niezawodnością, ergonomią obsługi, intuicyjnym interfejsem użytkownika oraz spełniając...
Najnowsze produkty i technologie
Sanktuarium w Kałkowie-Godowie z nowoczesnym systemem ogrzewania marki De Dietrich

Zakończono półtoraroczny projekt termomodernizacji w Sanktuarium Matki Bożej Bolesnej, Pani Ziemi Świętokrzyskiej, zlokalizowanym w Kałkowie-Godowie. Obecnie zarówno duchowni, jak i pielgrzymi odwiedzający...
Zakończono półtoraroczny projekt termomodernizacji w Sanktuarium Matki Bożej Bolesnej, Pani Ziemi Świętokrzyskiej, zlokalizowanym w Kałkowie-Godowie. Obecnie zarówno duchowni, jak i pielgrzymi odwiedzający to miejsce, mają dostęp do zaawansowanego technologicznie systemu grzewczego.
Elegancja i funkcjonalność: dlaczego schody strychowe są idealnym wyborem dla Twojego domu?
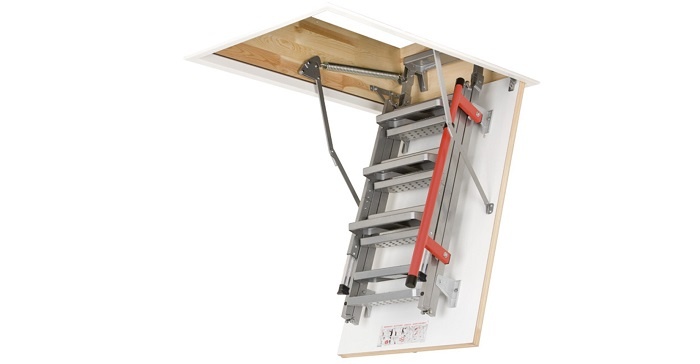
Składane schody prowadzące na strych są popularną alternatywą dla tradycyjnych schodów, które zazwyczaj zajmują bardzo dużo miejsca. W jakie konstrukcje warto zainwestować? Czym się charakteryzują?
Składane schody prowadzące na strych są popularną alternatywą dla tradycyjnych schodów, które zazwyczaj zajmują bardzo dużo miejsca. W jakie konstrukcje warto zainwestować? Czym się charakteryzują?
Efektywność prefabrykacji przewodów

Konstruktorzy szaf sterowniczych stoją przed wieloma wyzwaniami: począwszy od międzynarodowej presji konkurencyjnej i niedoboru wykwalifikowanych pracowników, po rosnące koszty pracy i materiałów. Stosunkowo...
Konstruktorzy szaf sterowniczych stoją przed wieloma wyzwaniami: począwszy od międzynarodowej presji konkurencyjnej i niedoboru wykwalifikowanych pracowników, po rosnące koszty pracy i materiałów. Stosunkowo niewiele można zrobić, aby wpłynąć na te aspekty, dlatego coraz częściej w centrum uwagi znajduje się produkcja własna ze wszystkimi procesami i strukturami, a także ogólna struktura kosztów.
EMC na przykładzie kabli zasilających i sterowniczych

Kompatybilność elektromagnetyczna kabli elektrycznych jest kluczowym parametrem, który charakteryzuje sposób stosowania i użytkowania danych kabli do wzajemnej współpracy kilku urządzeń elektrycznych zestawionych...
Kompatybilność elektromagnetyczna kabli elektrycznych jest kluczowym parametrem, który charakteryzuje sposób stosowania i użytkowania danych kabli do wzajemnej współpracy kilku urządzeń elektrycznych zestawionych w całość. Prawidłowe funkcjonowanie urządzeń może być zapewnione tylko i wyłącznie wtedy, gdy zakłócenia generowane przez otoczenie będą skutecznie blokowane. Generowane spodziewane zakłócenia elektromagnetyczne przez wyposażenie otaczające kable muszą zatem być w odpowiedni sposób odseparowane.
Jaki dysk zewnętrzny wybrać, robiąc backup danych?

Dzięki kopii zapasowej możesz wykonać kopię całej zawartości swojego komputera. W ten sposób nie stracisz swoich plików i programów. Istnieją różne typy pamięci zewnętrznych z oddzielną funkcją tworzenia...
Dzięki kopii zapasowej możesz wykonać kopię całej zawartości swojego komputera. W ten sposób nie stracisz swoich plików i programów. Istnieją różne typy pamięci zewnętrznych z oddzielną funkcją tworzenia kopii zapasowych. Czytaj dalej i dowiedz się, który z nich może odpowiadać Twoim potrzebom!
BayWa r.e. Solar Systems otwiera magazyn w Gdańsku!

Na początku 2024 roku firma BayWa r.e. Solar Systems zrobiła kolejny duży krok w rozwoju działalności na polskim rynku, otwierając nowy magazyn w Gdańsku. Jego powierzchnia to
25 000 m kw., co łącznie...
Na początku 2024 roku firma BayWa r.e. Solar Systems zrobiła kolejny duży krok w rozwoju działalności na polskim rynku, otwierając nowy magazyn w Gdańsku. Jego powierzchnia to
25 000 m kw., co łącznie daje ponad 45 tys. m kw. powierzchni magazynowej BayWa r.e. Solar Systems w Polsce.
Przelotowa złączka instalacyjna 2773 Inline do przewodów sztywnych
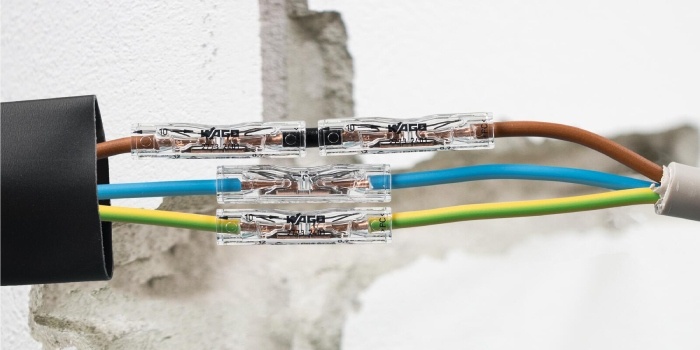
Dzięki takim złączkom od firmy WAGO ELWAG naprawienie lub przedłużenie przewodu jest tak proste jak nigdy dotąd! Za ich pomocą można nawet w najmniejszych przestrzeniach – szybko i bez użycia narzędzi...
Dzięki takim złączkom od firmy WAGO ELWAG naprawienie lub przedłużenie przewodu jest tak proste jak nigdy dotąd! Za ich pomocą można nawet w najmniejszych przestrzeniach – szybko i bez użycia narzędzi – połączyć przewody o przekroju od 0,75 do 4 mm kw. Wystarczy po prostu odizolować końcówkę przewodu i bez użycia jakichkolwiek narzędzi wsunąć ją do złączki – i bezpieczne połączenie gotowe.
Modułowe filtry aktywne firmy Schaffner

Aby przeciwdziałać negatywnym skutkom wyższych harmonicznych, można wykorzystać różne rozwiązania. Uzależnione są one od takich czynników jak: moc zapotrzebowana w zakładzie, sztywność sieci zasilającej,...
Aby przeciwdziałać negatywnym skutkom wyższych harmonicznych, można wykorzystać różne rozwiązania. Uzależnione są one od takich czynników jak: moc zapotrzebowana w zakładzie, sztywność sieci zasilającej, moc odbiorników czy budowa samej instalacji elektroenergetycznej. Dobór konkretnego rozwiązania powinien opierać się na analizie układu zasilającego zakład, reżimu pracy i zainstalowanych odbiorników. Bardzo ważnym punktem doboru jest wykonanie pomiarów Jakości Energii Elektrycznej i ich prawidłowa...
Bezpieczniki firmy SIBA – zastosowanie w magazynach energii z akumulatorami

Magazyny energii mogą być źródłem zasilania tylko wtedy gdy są sprawne. Systemy umożliwiające pracę urządzeń w przypadku awarii zasilania są zróżnicowane od małych urządzeń UPS do baterii akumulatorów...
Magazyny energii mogą być źródłem zasilania tylko wtedy gdy są sprawne. Systemy umożliwiające pracę urządzeń w przypadku awarii zasilania są zróżnicowane od małych urządzeń UPS do baterii akumulatorów zapewniających zasilanie całych zakładów. Jest zatem sprawą kluczową, aby systemy zasilania awaryjnego same działały bez zarzutu. Bezpieczniki produkowane przez firmę SIBA zabezpieczają urządzenia, które w przypadku awarii zasilania dostarczają energię kluczowym odbiorom.
Jak projektować schematy elektryczne i jakiego używać oprogramowania wspomagającego
Niniejszy artykuł zawiera informacje o projektowaniu schematów elektrycznych i używaniu oprogramowania wspomagającego projektowanie w branży elektrycznej i automatyce.
Niniejszy artykuł zawiera informacje o projektowaniu schematów elektrycznych i używaniu oprogramowania wspomagającego projektowanie w branży elektrycznej i automatyce.
Pomiary impedancji pętli zwarcia na farmach fotowoltaicznych

W związku z dynamicznym rozwojem farm fotowoltaicznych rośnie zapotrzebowanie na prawidłowe pomiary impedancji pętli zwarcia na odcinku inwerter-transformator nn/SN. Z pomocą przychodzi Sonel MZC-340-PV...
W związku z dynamicznym rozwojem farm fotowoltaicznych rośnie zapotrzebowanie na prawidłowe pomiary impedancji pętli zwarcia na odcinku inwerter-transformator nn/SN. Z pomocą przychodzi Sonel MZC-340-PV – pierwszy na świecie miernik przeznaczony do pomiarów impedancji pętli zwarcia w sieciach o napięciach dochodzących aż do 900 V AC, z kategorią pomiarową CAT IV 1000 V.
Nowoczesne narzędzia do projektowania i realizacji instalacji odgromowych

Wyładowania atmosferyczne jako nieodłączny element burz stanowią poważne zagrożenie dla ludzi oraz infrastruktury. Aby zminimalizować ryzyko strat spowodowanych przez wyładowania atmosferyczne, można skutecznie...
Wyładowania atmosferyczne jako nieodłączny element burz stanowią poważne zagrożenie dla ludzi oraz infrastruktury. Aby zminimalizować ryzyko strat spowodowanych przez wyładowania atmosferyczne, można skutecznie zabezpieczać wszelkiego rodzaju obiekty, projektując i montując instalację odgromową zgodną z obowiązującymi przepisami.
Wiosenna promocja w Elektroklubie! Do wygrania 3-dniowy wyjazd z atrakcjami!
Elektroklub jest programem partnerskim dla klientów wybranych hurtowni elektrotechnicznych, który powstał we współpracy z trzema producentami z tej branży: Philips, NKT i Schneider Electric. Obecnie trwa...
Elektroklub jest programem partnerskim dla klientów wybranych hurtowni elektrotechnicznych, który powstał we współpracy z trzema producentami z tej branży: Philips, NKT i Schneider Electric. Obecnie trwa w nim wiosenna promocja, w której można wygrać supernagrody!
Inwertery hybrydowe: przyszłość zrównoważonej energetyki

Chcesz zwiększyć wydajność swojej instalacji fotowoltaicznej? Pomyśl o inwerterach hybrydowych. Dowiedz się, czym są te urządzenia, jakie korzyści płyną z ich wykorzystania i dlaczego to właśnie one są...
Chcesz zwiększyć wydajność swojej instalacji fotowoltaicznej? Pomyśl o inwerterach hybrydowych. Dowiedz się, czym są te urządzenia, jakie korzyści płyną z ich wykorzystania i dlaczego to właśnie one są przyszłością zrównoważonej energetyki.
Komputer PICO-EHL4-SEMI z oszczędnymi procesorami Intel® Celeron® J6412 oraz N6210
Firma CSI S.A. poszerza ofertę komputerów Mini PC o nowy produkt z serii PICO-SEMI od AAEON. Komputer PICO-EHL4-SEMI jest dostępny w dwóch wersjach procesorowych: Intel® Celeron® J6412 o mocy 10 W i Intel®...
Firma CSI S.A. poszerza ofertę komputerów Mini PC o nowy produkt z serii PICO-SEMI od AAEON. Komputer PICO-EHL4-SEMI jest dostępny w dwóch wersjach procesorowych: Intel® Celeron® J6412 o mocy 10 W i Intel® Celeron® N6210 o mocy 6,5 W.
Nowe ograniczniki przepięć do systemów automatyki i nie tylko
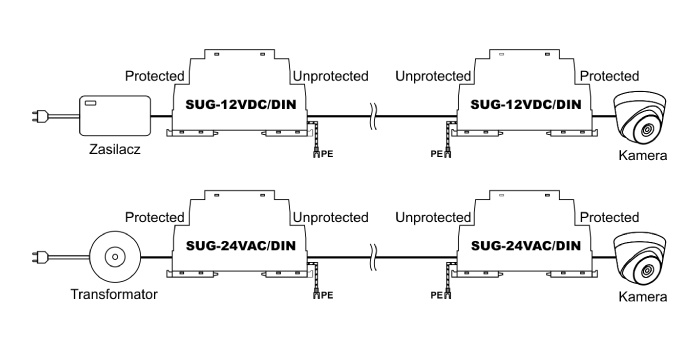
Już wkrótce gama produktów z firmy Ewimar, zostanie wzbogacona o nowe produkty ochrony przeciwprzepięciowej, dedykowane do linii zasilających, linii pomiarowych oraz transmisyjnych.
Już wkrótce gama produktów z firmy Ewimar, zostanie wzbogacona o nowe produkty ochrony przeciwprzepięciowej, dedykowane do linii zasilających, linii pomiarowych oraz transmisyjnych.
Świadectwa energetyczne a nowoczesne instalacje elektryczne – jak innowacje technologiczne przekładają się na klasę energetyczną budynków?

Nowoczesne technologie doprowadziły do wyraźnej transformacji sektora budownictwa, szczególnie w kwestii poprawy efektywności energetycznej. W dobie rosnącej świadomości ekologicznej i zmian klimatycznych...
Nowoczesne technologie doprowadziły do wyraźnej transformacji sektora budownictwa, szczególnie w kwestii poprawy efektywności energetycznej. W dobie rosnącej świadomości ekologicznej i zmian klimatycznych optymalizacja zużycia energii staje się priorytetem. Jednym z ważniejszych kroków prowadzących do obniżenia klasy energetycznej budynków jest wprowadzenie świadectwa energetycznego i nowoczesnych instalacji elektrycznych.
Fronius GEN24

Fronius zapewnia optymalne bezpieczeństwo i wysoki stopień zużycia energii na potrzeby własne w produkcji energii słonecznej – wszystko dzięki wysokiej jakości falownikom, do których dołącza teraz Fronius...
Fronius zapewnia optymalne bezpieczeństwo i wysoki stopień zużycia energii na potrzeby własne w produkcji energii słonecznej – wszystko dzięki wysokiej jakości falownikom, do których dołącza teraz Fronius GEN24.
CABLE POOLING: optymalne wykorzystanie zasobów elektrycznych

Odnawialne źródła energii (OZE) odgrywają kluczową rolę w globalnych wysiłkach na rzecz zrównoważonego rozwoju i redukcji emisji gazów cieplarnianych. Jednym z wyzwań związanych z efektywnym wykorzystaniem...
Odnawialne źródła energii (OZE) odgrywają kluczową rolę w globalnych wysiłkach na rzecz zrównoważonego rozwoju i redukcji emisji gazów cieplarnianych. Jednym z wyzwań związanych z efektywnym wykorzystaniem energii ze źródeł odnawialnych jest gromadzenie i przesyłanie wyprodukowanej energii elektrycznej. W tym kontekście technologia cable pooling zyskuje na znaczeniu, umożliwiając zoptymalizowane zarządzanie przesyłem energii elektrycznej ze źródeł OZE.
Barwa światła, moc, rodzaj trzonka. Sprawdź, czym kierować się przy zakupie żarówek LED

Oświetlenie LED cieszy się ogromną popularnością i nie ma w tym nic dziwnego, jeśli weźmie się pod lupę wszystkie jego zalety. Żarówki LED są wykorzystywane zarówno w warunkach domowych, jak i na zewnątrz,...
Oświetlenie LED cieszy się ogromną popularnością i nie ma w tym nic dziwnego, jeśli weźmie się pod lupę wszystkie jego zalety. Żarówki LED są wykorzystywane zarówno w warunkach domowych, jak i na zewnątrz, mają różne rozmiary, dzięki czemu można je dopasować do praktycznie każdego rodzaju lamp, są energooszczędne, a to tylko kilka z wielu ich zalet. Na co zwracać uwagę przy zakupie tego rodzaju żarówek i jak dopasować ich parametry do swoich potrzeb?
Które produkty bankowe przydają się podczas remontu?

Przeprowadzenie remontu to drogie i wymagające zadanie. Niemalże wszystkie wykonywane prace zmuszają zainteresowanych do podejmowania poważnych i przemyślanych decyzji finansowych. Mogą to jednak ułatwić...
Przeprowadzenie remontu to drogie i wymagające zadanie. Niemalże wszystkie wykonywane prace zmuszają zainteresowanych do podejmowania poważnych i przemyślanych decyzji finansowych. Mogą to jednak ułatwić niektóre produkty bankowe. O których z nich mowa? Tego lepiej dowiedzieć się jeszcze przed rozpoczęciem prac budowalnych.
Czy fotowoltaika podnosi wartość nieruchomości?

Panele fotowoltaiczne są coraz bardziej popularne. W dobie rosnących cen energii wiele osób ceni sobie niezależność od zewnętrznych dostawców prądu, oszczędność, jaką daje fotowoltaika oraz to, że jest...
Panele fotowoltaiczne są coraz bardziej popularne. W dobie rosnących cen energii wiele osób ceni sobie niezależność od zewnętrznych dostawców prądu, oszczędność, jaką daje fotowoltaika oraz to, że jest to ekologiczne źródło energii. Montaż paneli fotowoltaicznych na działce lub dachu domu ma jeszcze jedną zaletę – w przypadku sprzedaży nieruchomości podnosi jej wartość.
Apator uruchomił kolejny magazyn energii w sieci niskiego napięcia

Apator SA we współpracy z TAURON Dystrybucja SA uruchomił magazyn energii służący do stabilizacji parametrów pracy sieci dystrybucyjnej niskiego napięcia. To kolejny projekt realizowany przez toruńskiego...
Apator SA we współpracy z TAURON Dystrybucja SA uruchomił magazyn energii służący do stabilizacji parametrów pracy sieci dystrybucyjnej niskiego napięcia. To kolejny projekt realizowany przez toruńskiego producenta dla krajowych Operatorów Sieci Dystrybucji, którzy poszukują skutecznych rozwiązań technicznych do bilansowania sieci oraz redukcji nadmiernych obciążeń w szczytach produkcji energii z odnawialnych źródeł.
Bezpieczeństwo Twojej inwestycji w PV to również certyfikowane ograniczniki przepięć Phoenix Contact

Jak wykazano w różnych testach, nie tylko na uczelniach technicznych w Polsce, duży procent ograniczników przepięć (SPD) dostępnych na rynku nie spełnia parametrów deklarowanych w kartach katalogowych....
Jak wykazano w różnych testach, nie tylko na uczelniach technicznych w Polsce, duży procent ograniczników przepięć (SPD) dostępnych na rynku nie spełnia parametrów deklarowanych w kartach katalogowych. Dodatkowo w różnych materiałach marketingowych również można znaleźć nie zawsze pełne informacje na temat wymagań stawianych SPD, co nie pomaga w właściwym doborze odpowiedniego modelu do aplikacji. W tym artykule postaramy się przybliżyć najważniejsze zagadnienia, które pozwolą dobrać bezpieczne ograniczniki...
Automatyka budynkowa – jak żyć wygodniej, lepiej i oszczędniej

Inteligentny dom często mylony jest z budynkiem pasywnym. Należy jednak pamiętać, że nie można tych dwóch pojęć stosować zamiennie. Samo zastosowanie smart home i innych komponentów automatyki nie czyni...
Inteligentny dom często mylony jest z budynkiem pasywnym. Należy jednak pamiętać, że nie można tych dwóch pojęć stosować zamiennie. Samo zastosowanie smart home i innych komponentów automatyki nie czyni z tradycyjnego domu budynku pasywnego. Niewątpliwie jednak należy pamiętać, że elementy automatyki budynkowej są składową pasywnych budowli i nawet zwykłe mieszkanie potrafią uczynić bardziej oszczędnym i ekologicznym.
Drukarki etykiet dla elektryków i elektroinstalatorów Brother

Najnowsze przemysłowe drukarki etykiet stworzone zostały z myślą o profesjonalistach, dla których ważna jest jakość, niezawodność oraz trwałość tworzonych oznaczeń. P‑touch E100VP, P-touch E300VP i P-touch...
Najnowsze przemysłowe drukarki etykiet stworzone zostały z myślą o profesjonalistach, dla których ważna jest jakość, niezawodność oraz trwałość tworzonych oznaczeń. P‑touch E100VP, P-touch E300VP i P-touch E550WVP to przenośne i szybkie urządzenia, które oferują specjalne funkcje do druku najpopularniejszych typów etykiet. Urządzenia pozwalają na szybkie i bezproblemowe drukowanie oznaczeń kabli, przewodów, gniazdek elektrycznych, przełączników oraz paneli krosowniczych.
Modularny system drukujący – Thermomark E series

System drukujący Thermomark E to całkowita nowość na rynku oznaczania. Jest to modułowy system do automatyzacji produkcji oznaczników łączący ze sobą etap drukowania i montażu różnych materiałów w jednym...
System drukujący Thermomark E to całkowita nowość na rynku oznaczania. Jest to modułowy system do automatyzacji produkcji oznaczników łączący ze sobą etap drukowania i montażu różnych materiałów w jednym cyklu roboczym. Rozwiązanie to umożliwia proste i bardzo wydajne oznaczanie przemysłowe, dzięki czemu efektywność naszej produkcji może wzrosnąć diametralnie.
MeternetPRO – system zdalnego odczytu, rejestracji danych oraz sterowania i powiadamiania
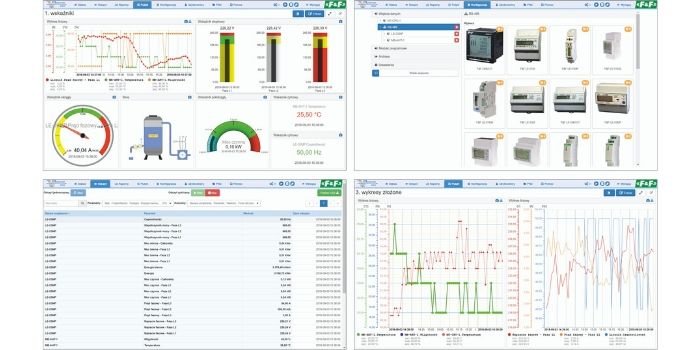
Wiele ostatnio mówi się o poprawie efektywności energetycznej oraz energii odnawialnej w kontekście redukcji gazów cieplarnianych i rosnących kosztów energii. W silnie konkurencyjnym otoczeniu przedsiębiorstwa...
Wiele ostatnio mówi się o poprawie efektywności energetycznej oraz energii odnawialnej w kontekście redukcji gazów cieplarnianych i rosnących kosztów energii. W silnie konkurencyjnym otoczeniu przedsiębiorstwa wykazują dużą determinację do zmian prowadzących do optymalizacji kosztów, co zapewnić ma im zachowanie przewagi konkurencyjnej, wynikającej np. z przyjętej strategii przewagi kosztowej.
W jakich zawodach niezwykle ważna jest odporność na stres?

Stres to jedna z rzeczy, z którą mierzymy się wszyscy, niemal każdego dnia. W domu, w pracy, niekiedy podczas podróży. Istnieje wiele zawodów, związanych z wysokim poziomem stresu. Bardzo istotna jest...
Stres to jedna z rzeczy, z którą mierzymy się wszyscy, niemal każdego dnia. W domu, w pracy, niekiedy podczas podróży. Istnieje wiele zawodów, związanych z wysokim poziomem stresu. Bardzo istotna jest wtedy odporność psychiczna osoby zatrudnionej na danym stanowisku. To cecha, jaką doceni wielu pracodawców. Dowiedzmy się więc, w jakich kategoriach zawodowych jest ona szczególnie istotna i jak może wpłynąć na Twoją karierę!